Návod na složení
Následující návod tě provede krok za krokem stavbou Roboruky. Celá stavba je rozdělena do tří částí, které jsou dále rozděleny do několika dílčích kroků, jejichž pořadí je nutné dodržovat, aby se zamezilo nutnosti rozlamovat již slepené díly.
Výrobní podklady
Zde si můžeš stáhnout výrobní podklady na laser pro Roboruku. Zároveň zde najdeš výrobní podklady pro desku plošných spojů.
Zdrojové soubory
Obecné rady
Sestavení Roboruky není náročné, některé kroky však vyžadují pečlivost. Čti proto návod pozorně a obzvlášť platí: dvakrát měř a jednou řež neboli dvakrát přikládej nasucho a jednou natírej lepidlem.
Pro sestavení Roboruky budeš potřebovat:
- ostrý modelářský nebo zalamovací nůž,
- kousek smirkového papíru,
- křížový šroubovák,
- pájku,
- lepidlo na dřevo (Herkules).
Vylamování dílů z panelu
Většina dílků je vyřezána z desky překližky. Pro snadnou manipulaci jsou díly panelu uchyceny můstky - malými neprořezanými kousky dřeva. Samy tedy díly nevypadnou a je třeba je opatrně vylomit. V případě komplikovanějších nebo těžce vyloupnutelných dílů desku otoč a můstky přeřízni nožem!
Lepení dílů k sobě
Všechny dílky obsahují zámečky, které ti umožní dílky přesně napozicovat a často vyloučí i špatné složení. Díky zámečkům si můžeš zkusit některé kroky prvně “nasucho” bez lepidla a následně po ověření toho, že do sebe zapadají, je můžeš natřít lepidlem.
Na lepení dřeva k sobě používej lepidlo Herkules - s výhodou v malém balení s aplikátorem.

1
Lepidlo na lepení dřeva.
Při skládání nasucho si všimni, které plochy se sebe dotýkají - to jsou ty plochy, které musíš natřít lepidlem. A kolik dávat lepidla? Tak akorát, aby vyplnilo všechny mezery - po stlačení dílků by mělo ze spoje vytéci trochu lepidla, ne však příliš. Toto přebytečné lepidlo můžeš utřít kouskem hadru nebo papírovou utěrkou.

2
Nanesení lepidla na lepenou hranu.
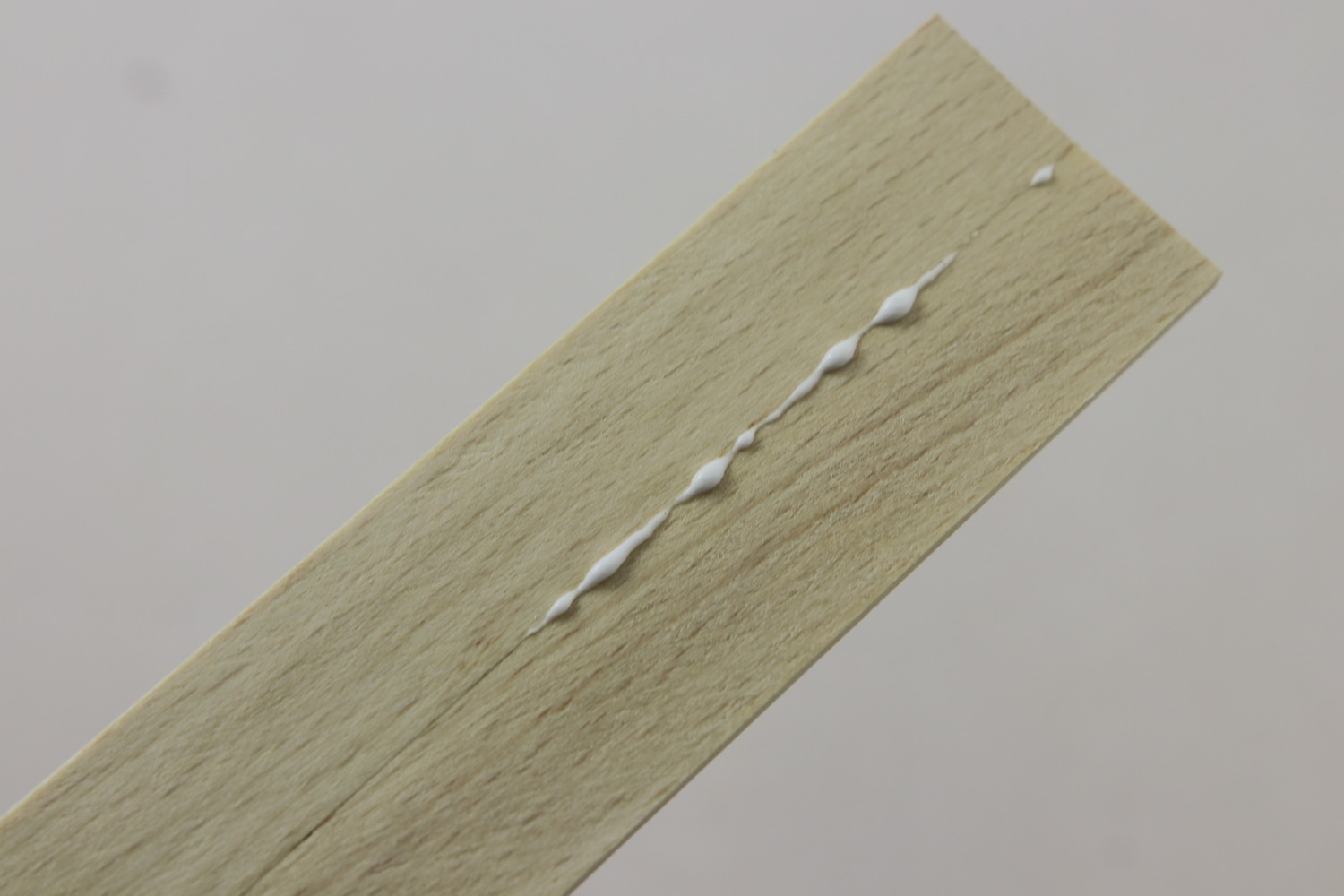
3
Správné množství vytlačeného lepidla.

4
Málo lepidla - žádné se nevytlačilo.
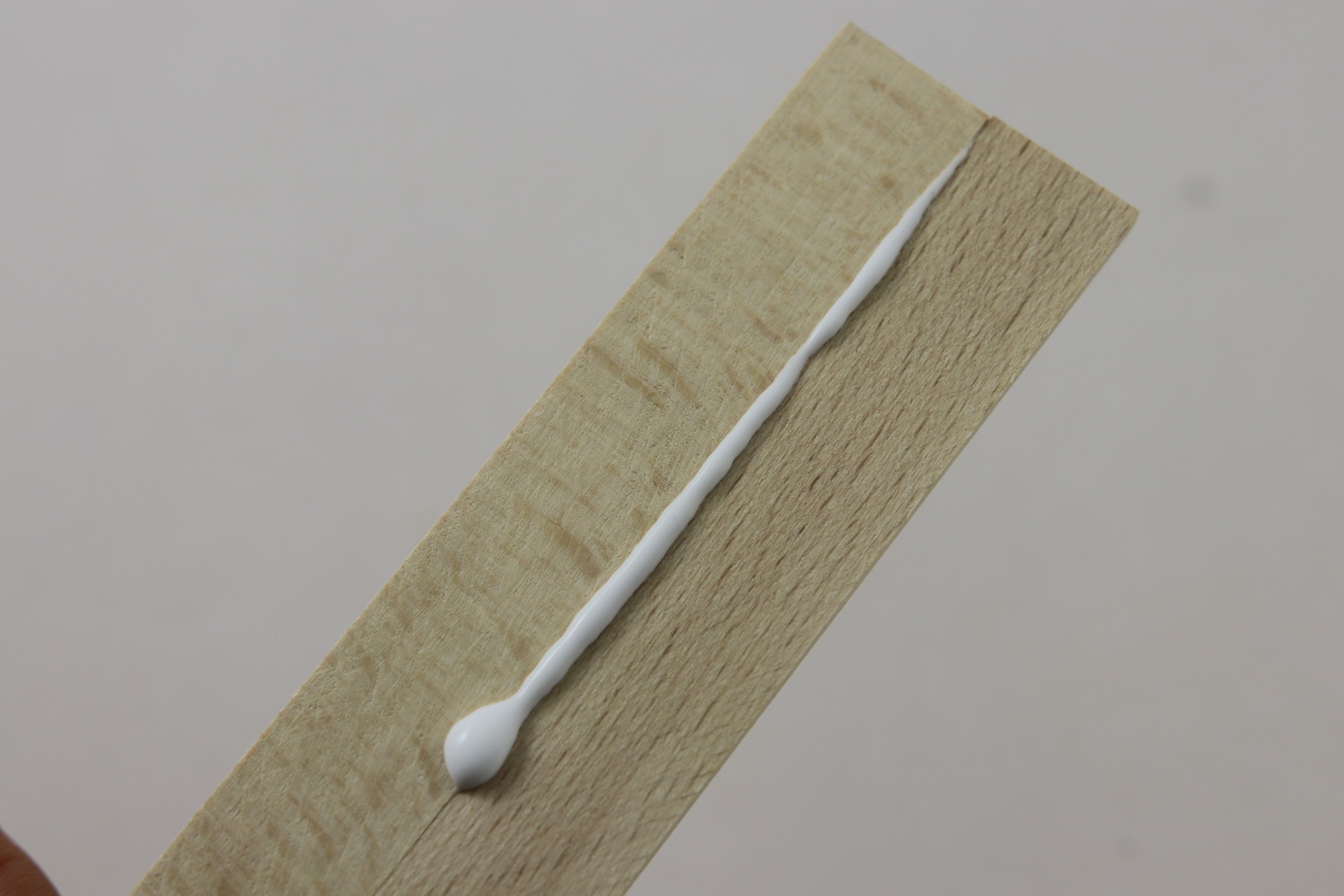
5
Příliš lepidla - většina ho byla vytlačena ven.
RBControl
RBControl - řídicí elektronika je navržena jako univerzální deska pro řízení různých robotických platforem. Pro získání funkční elektroniky na provoz Roboruky stačí osadit jen některé součástky.
Chyby v této sekci
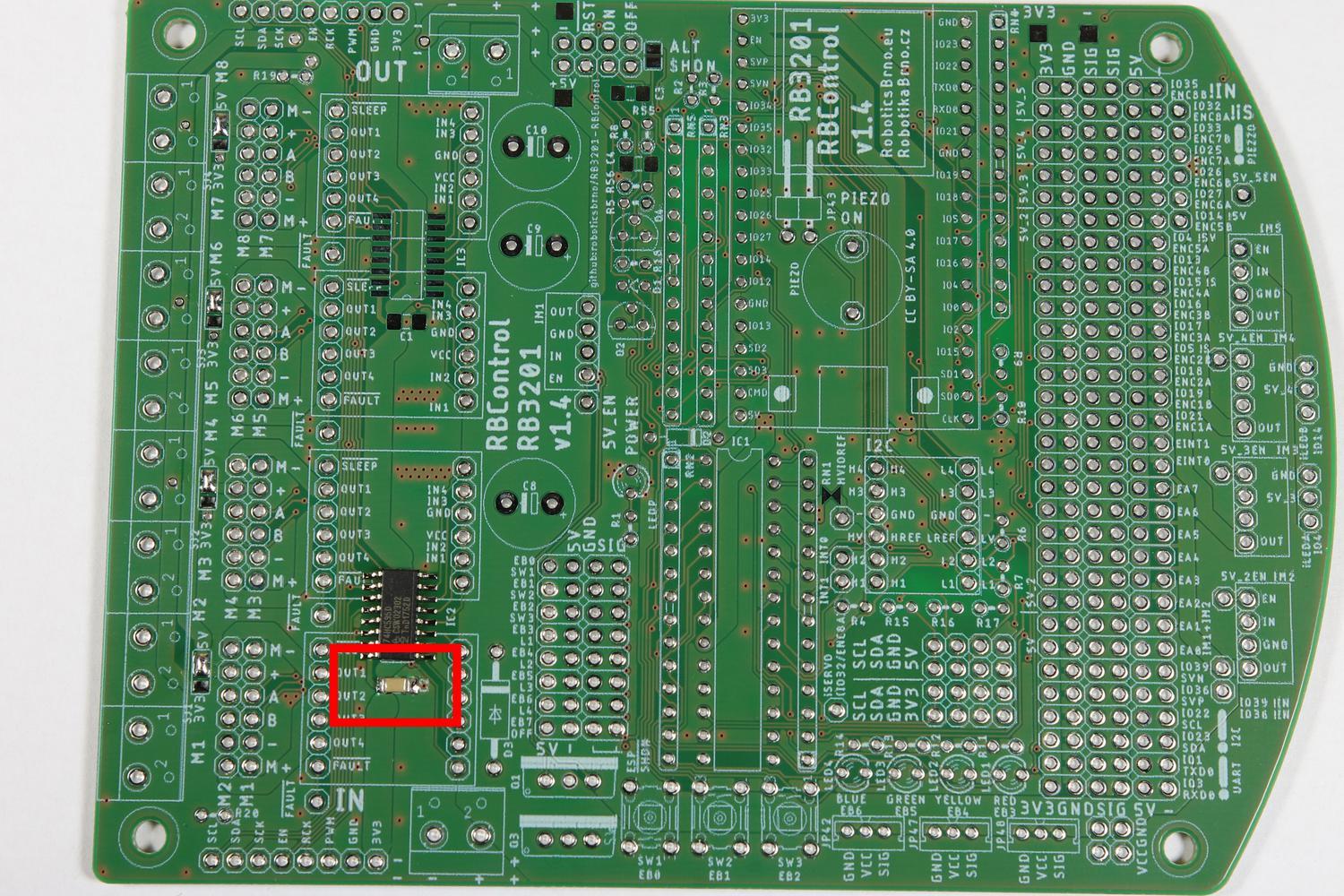
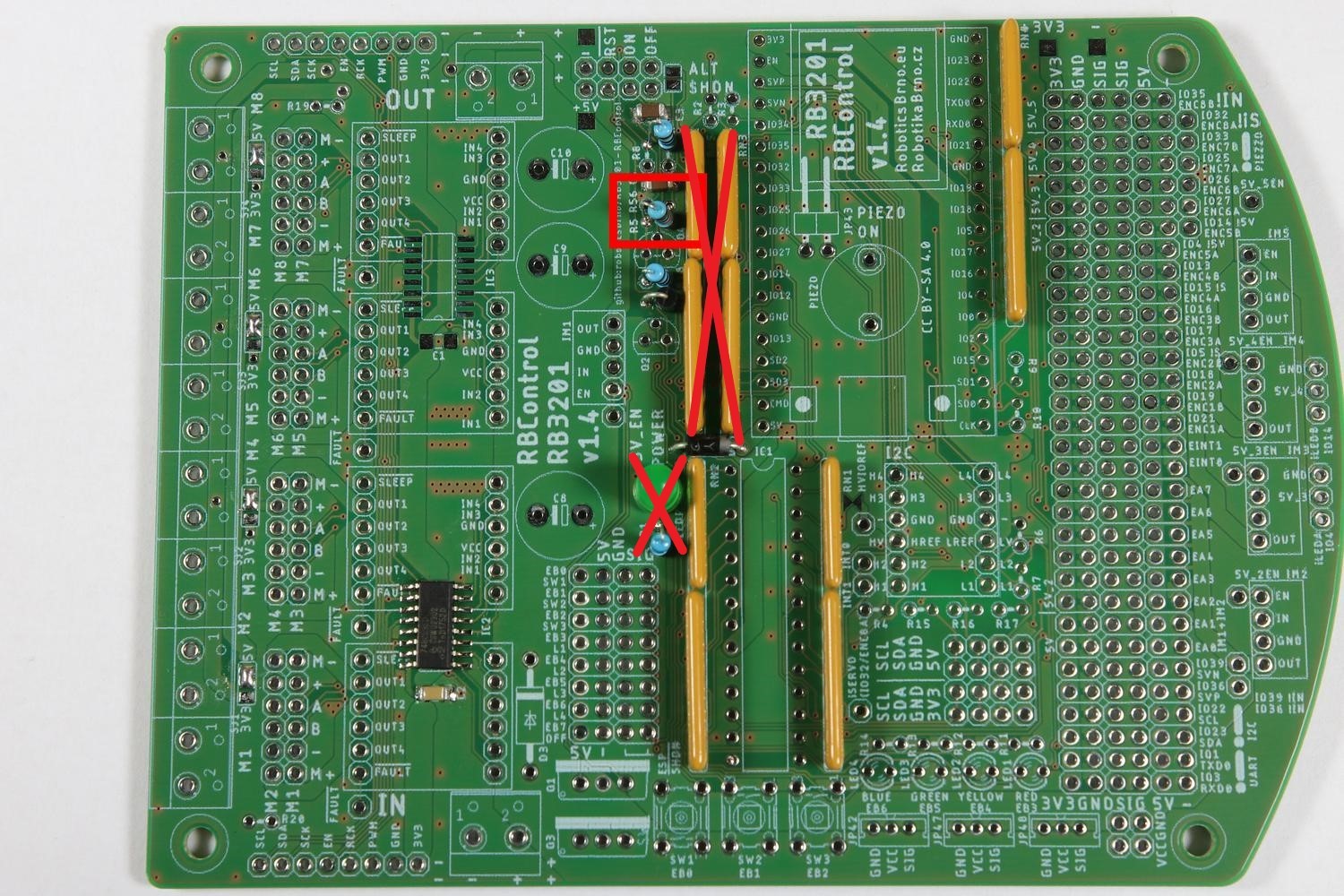
Osazování odporu R8 a R55 je v návodu nafoceno špatně. V návodu jsou odpory otočeny o 90 stupňů a nerespektují osazovací/informační potisky na desce, které jsou správně. Je proto potřeba při osazování těchto rezistorů dávat pozor a nejít slepě podle fotek.
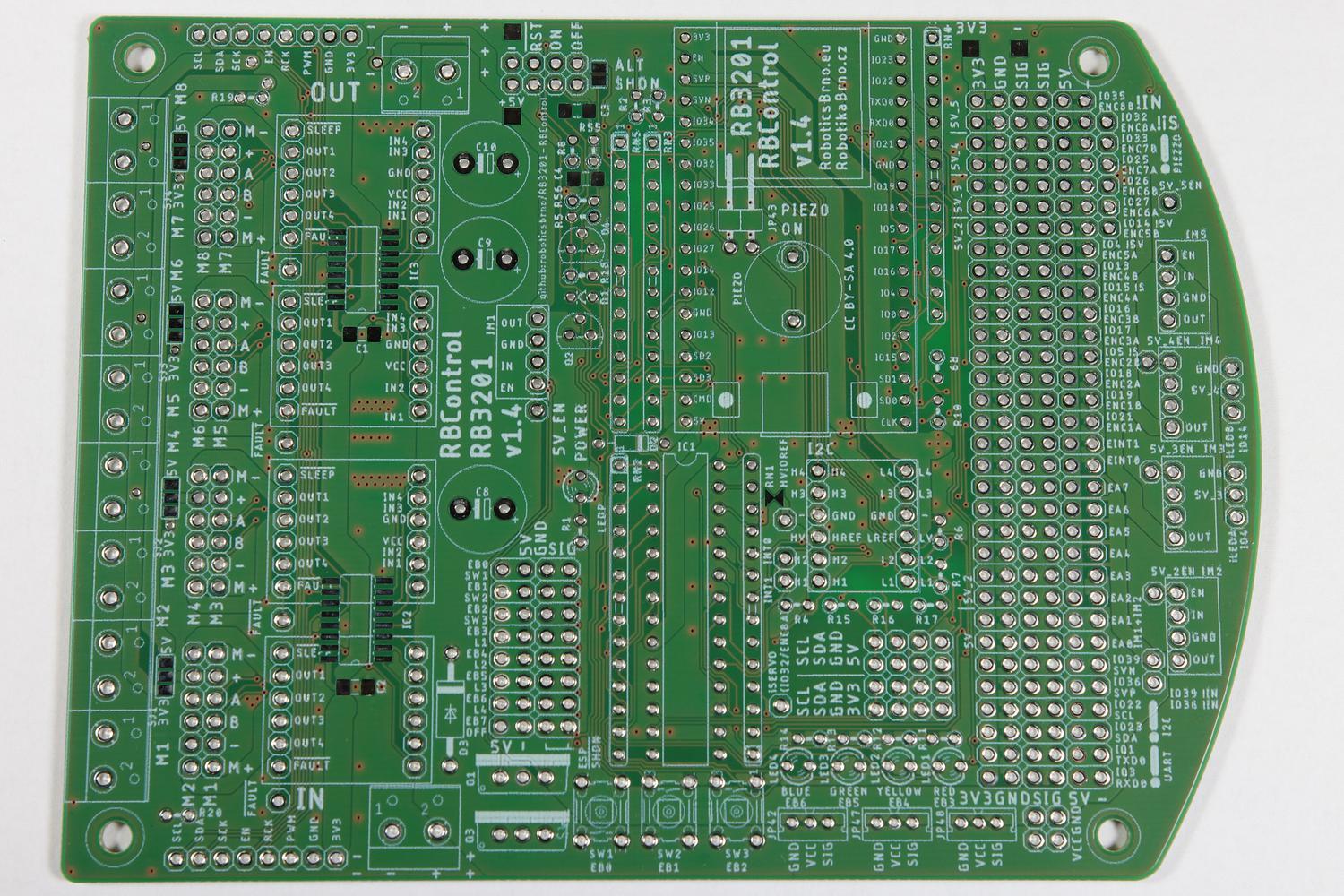
1
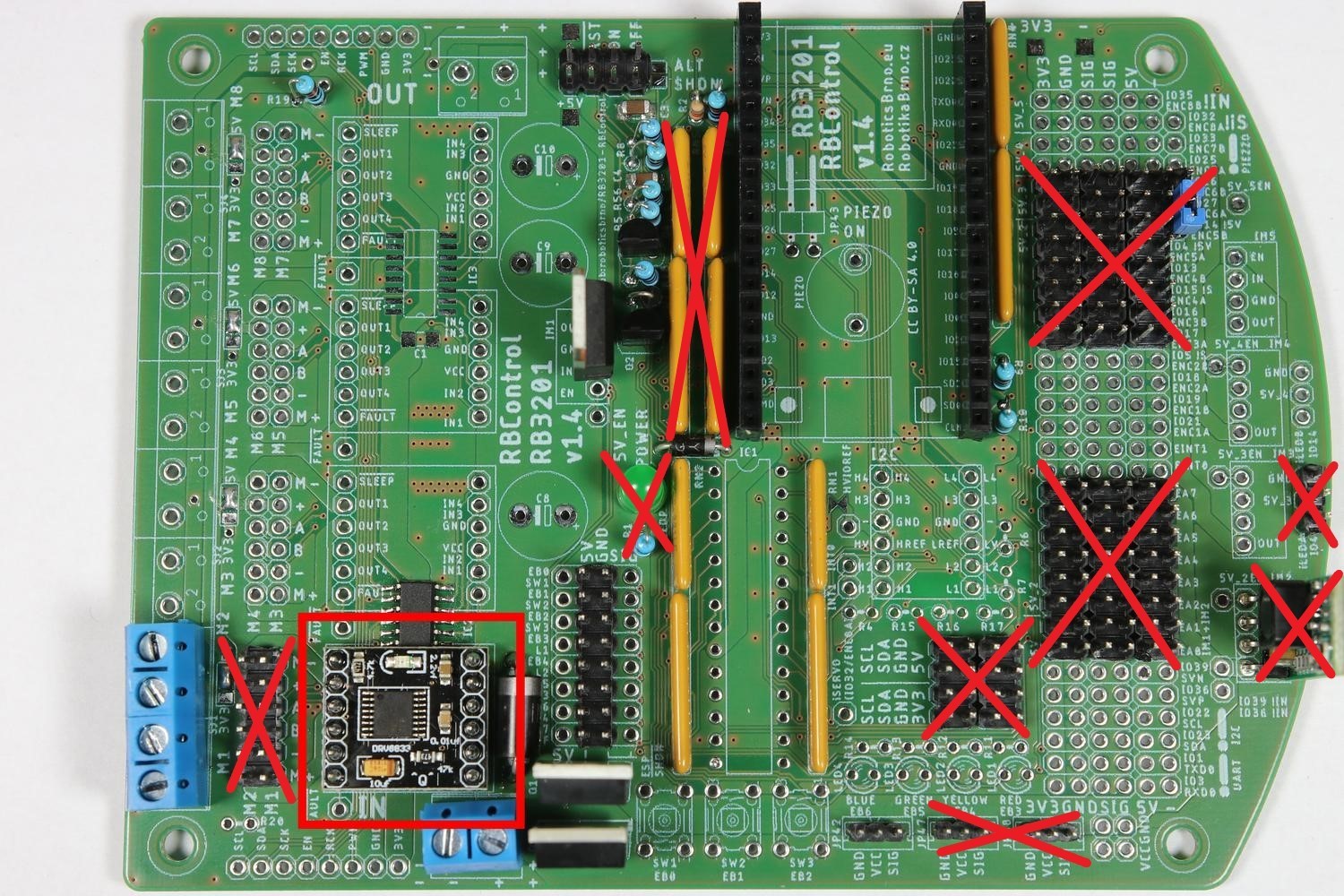
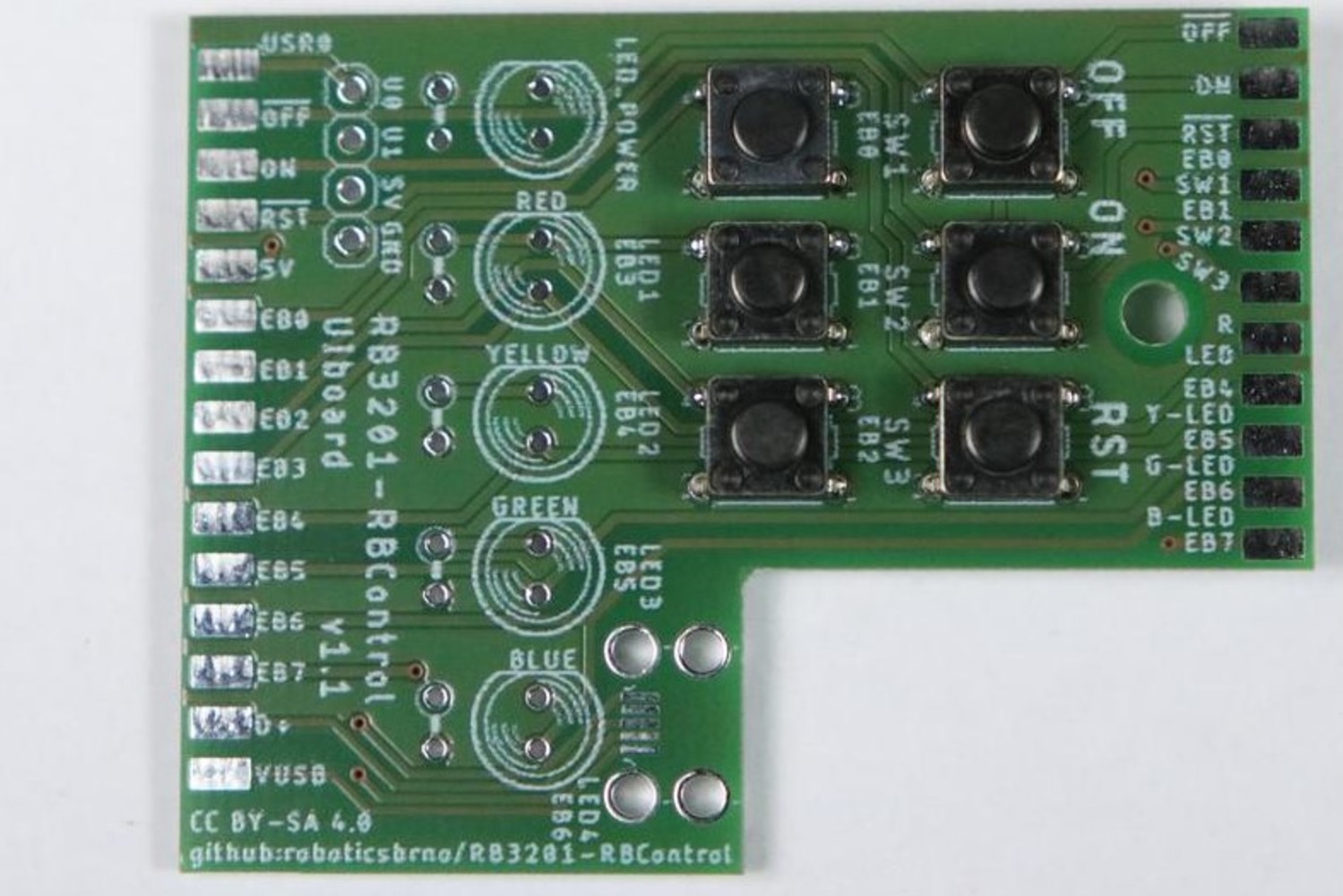
Přední strana ještě neosazené desky. Součástky se budou pájet pouze na tuto přední stranu.

2
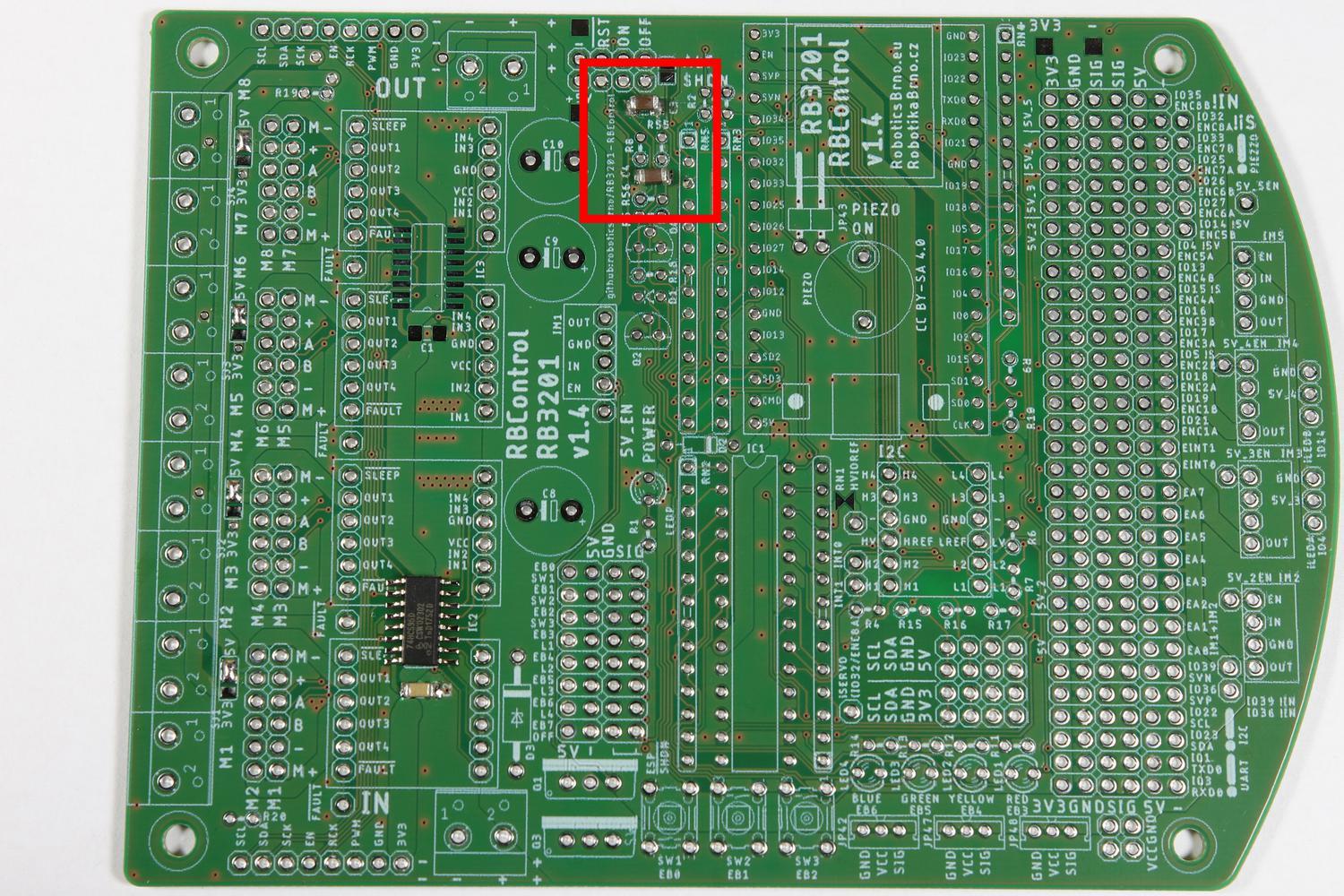
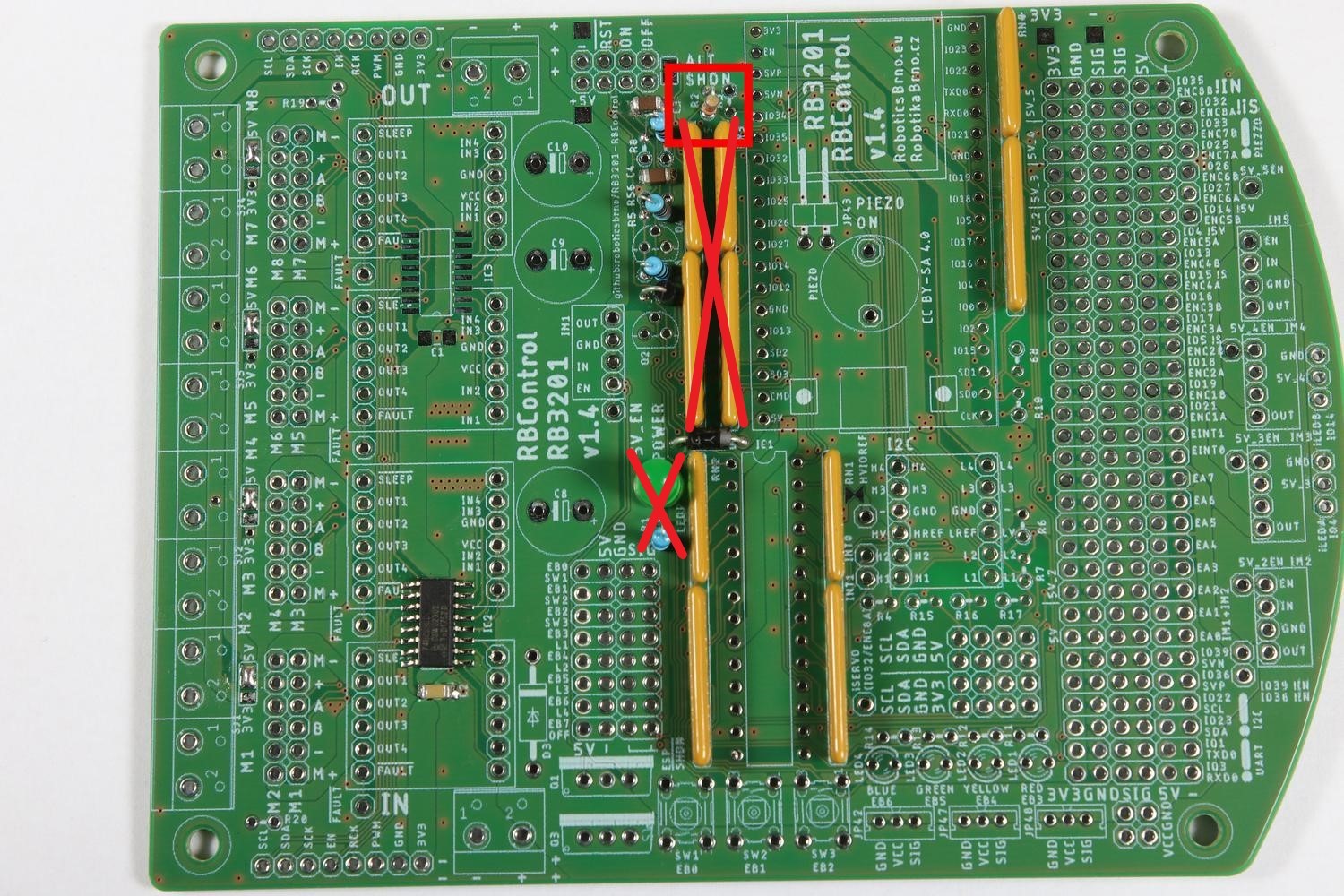
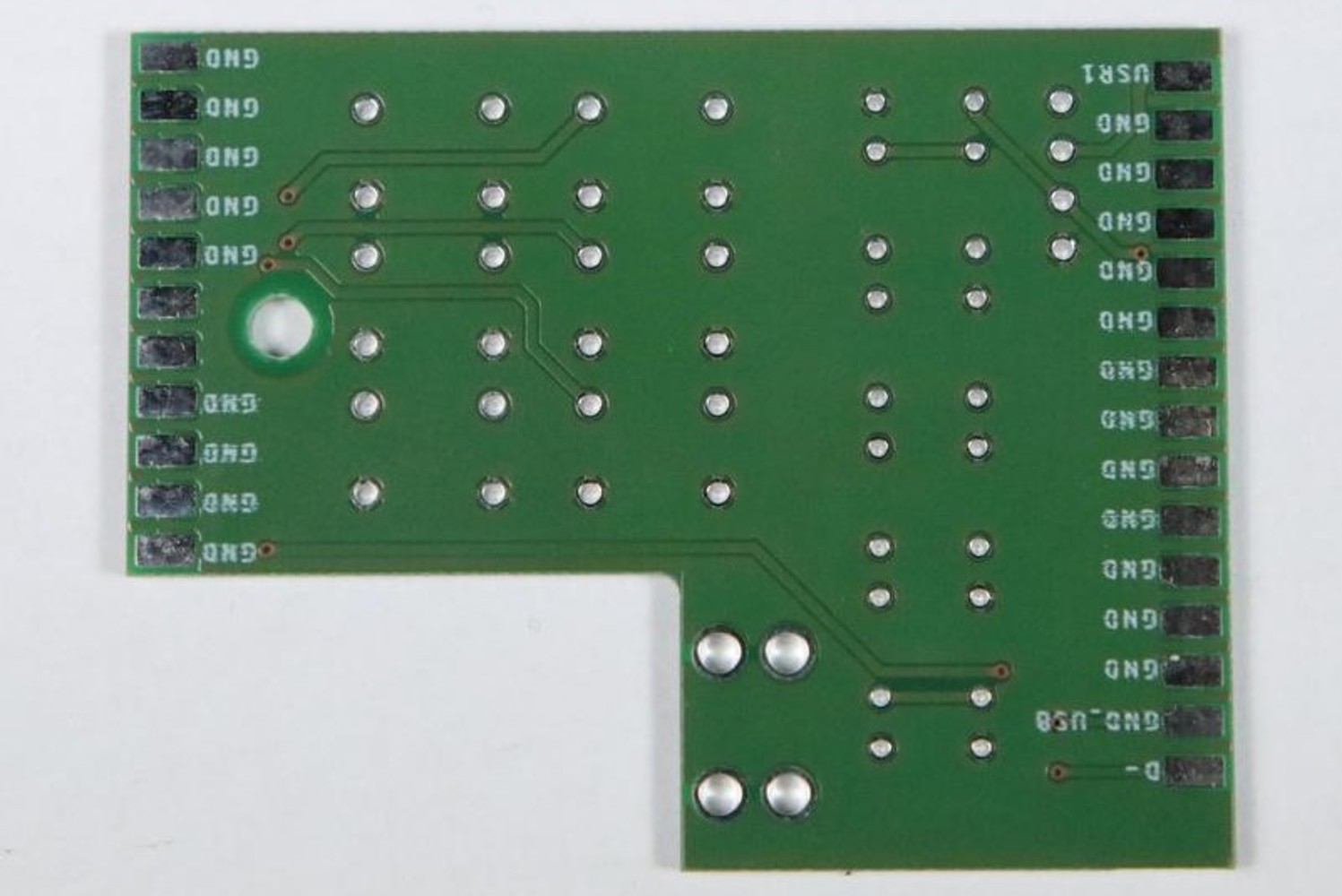
Zadní strana neosazené desky.

3
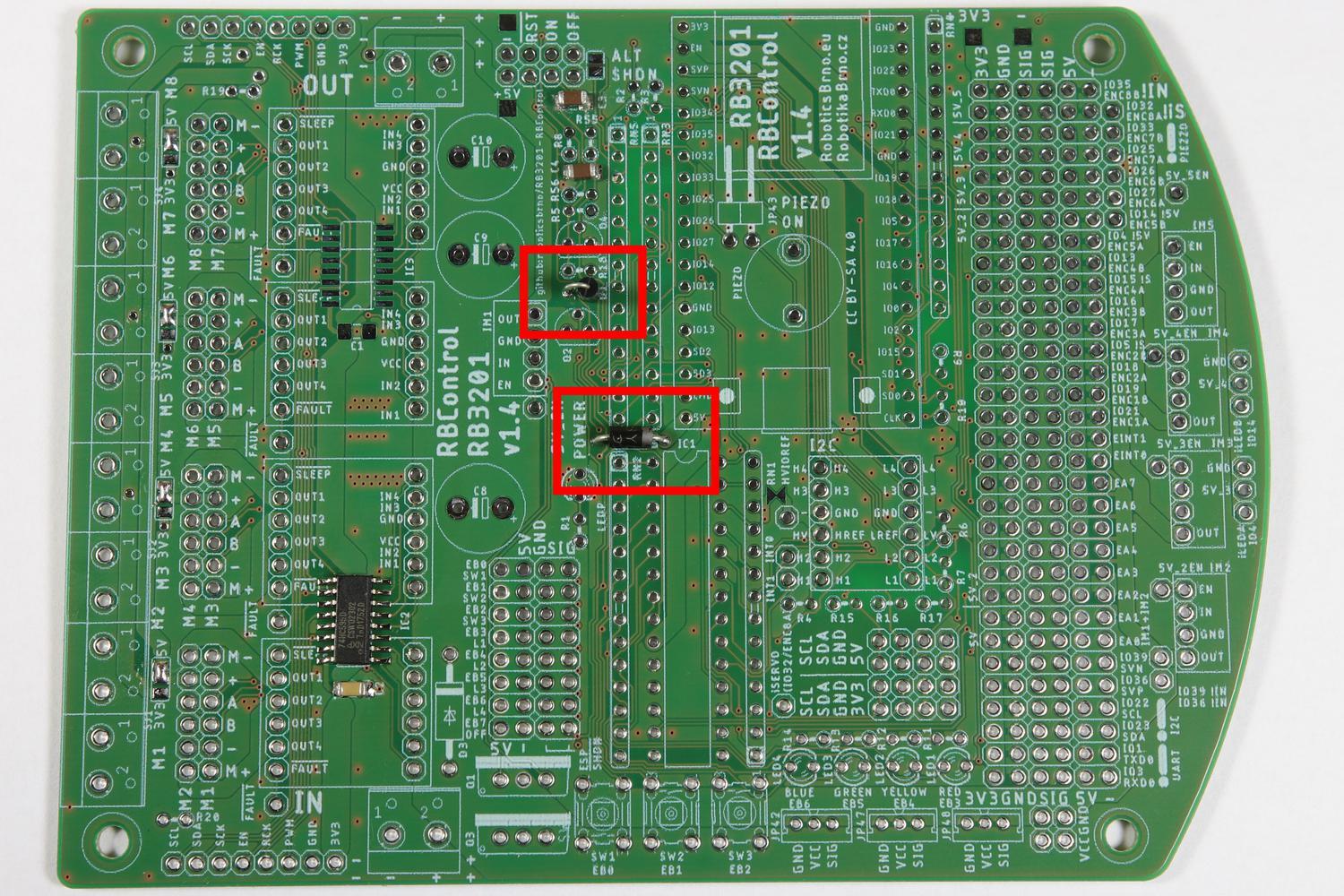
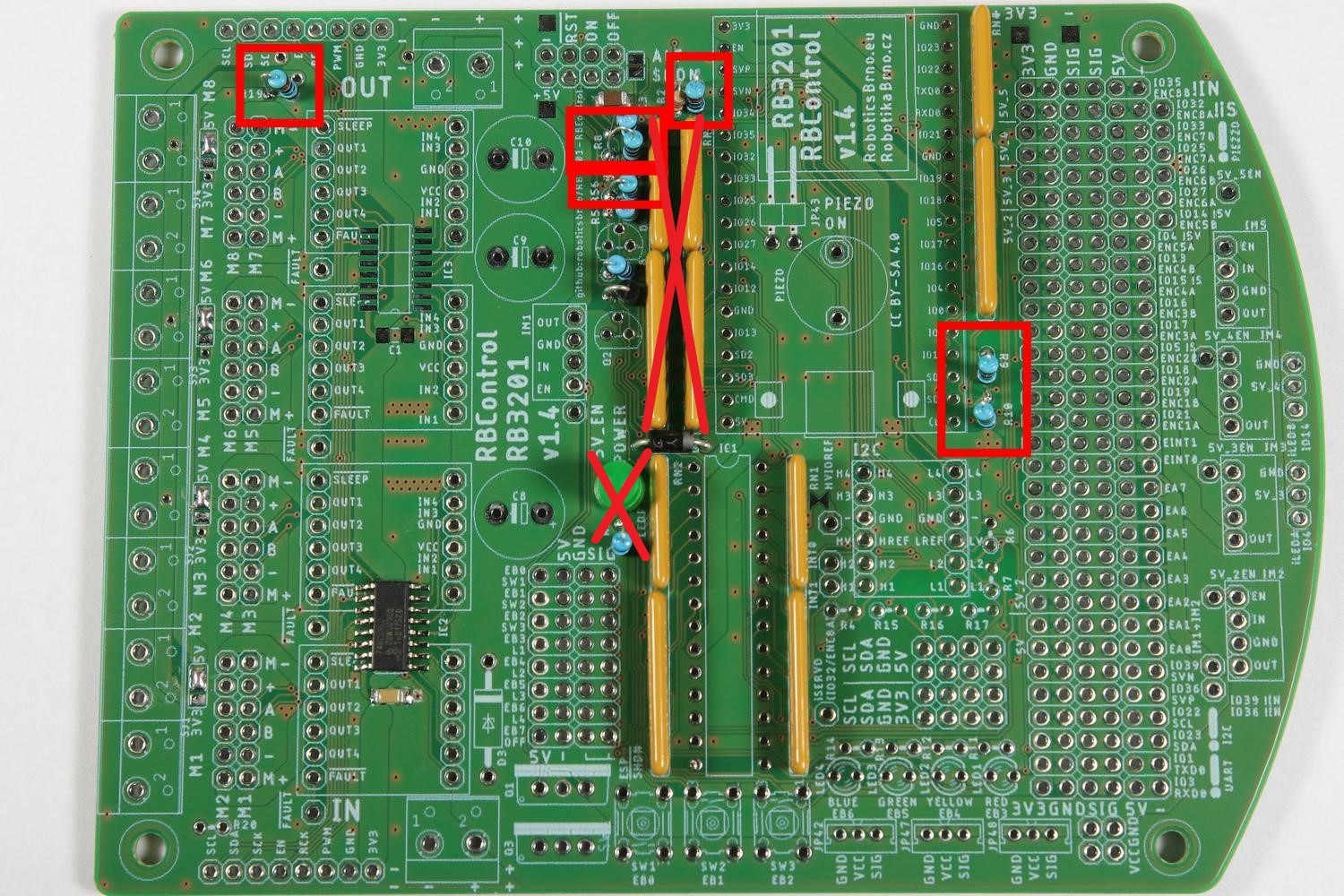
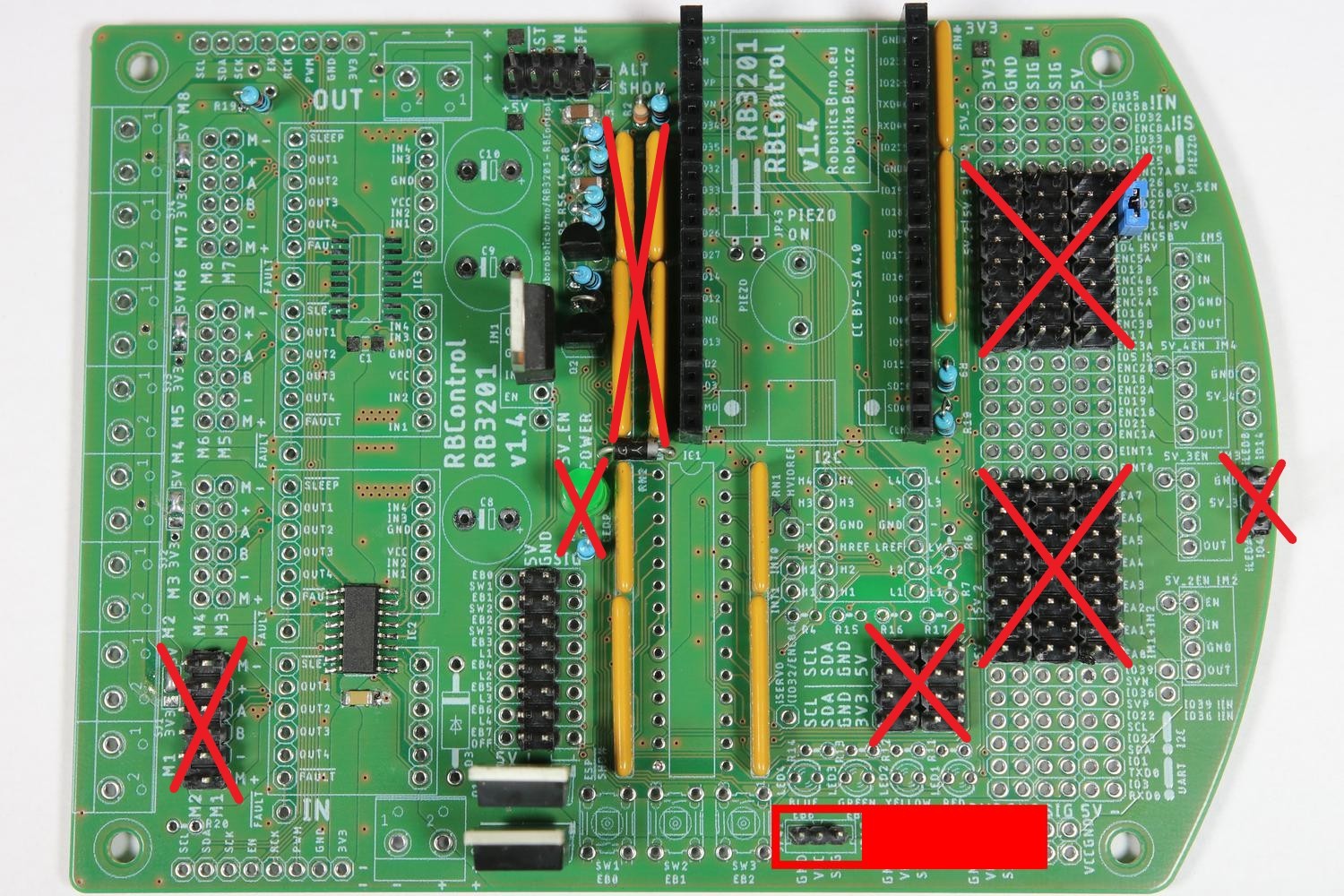
Dostatečně osazená deska pro základní funkcionalitu Roboruky.
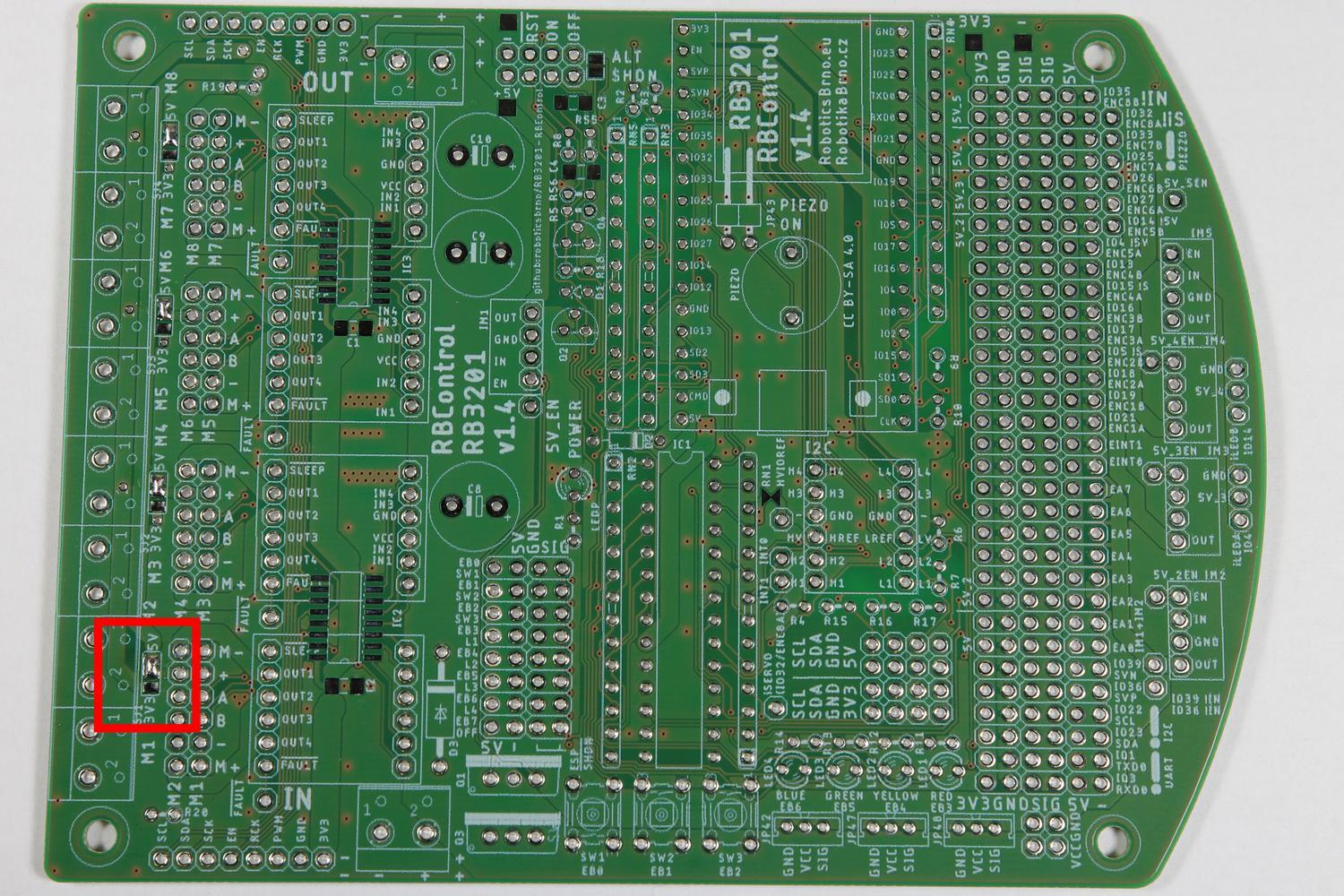
4
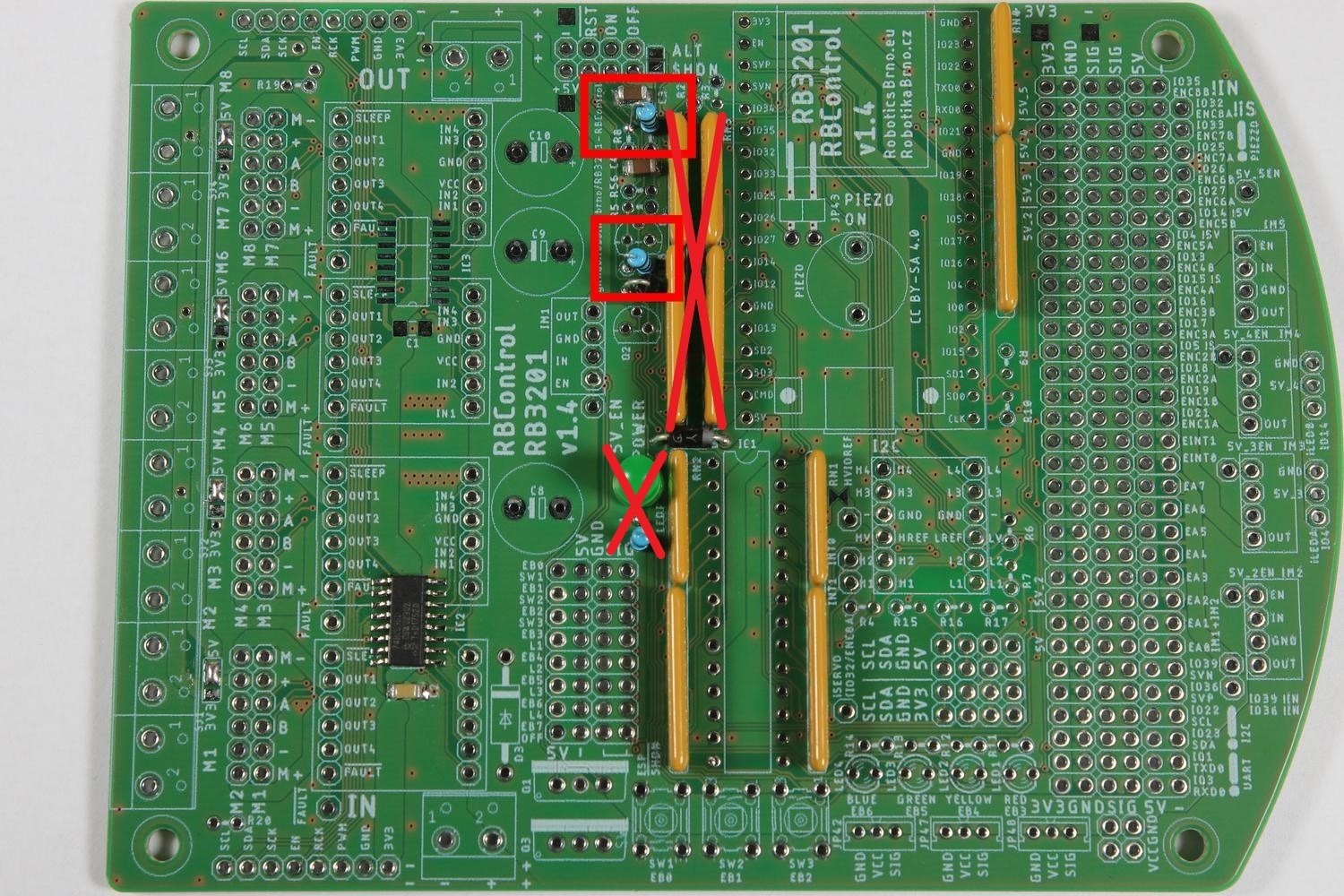
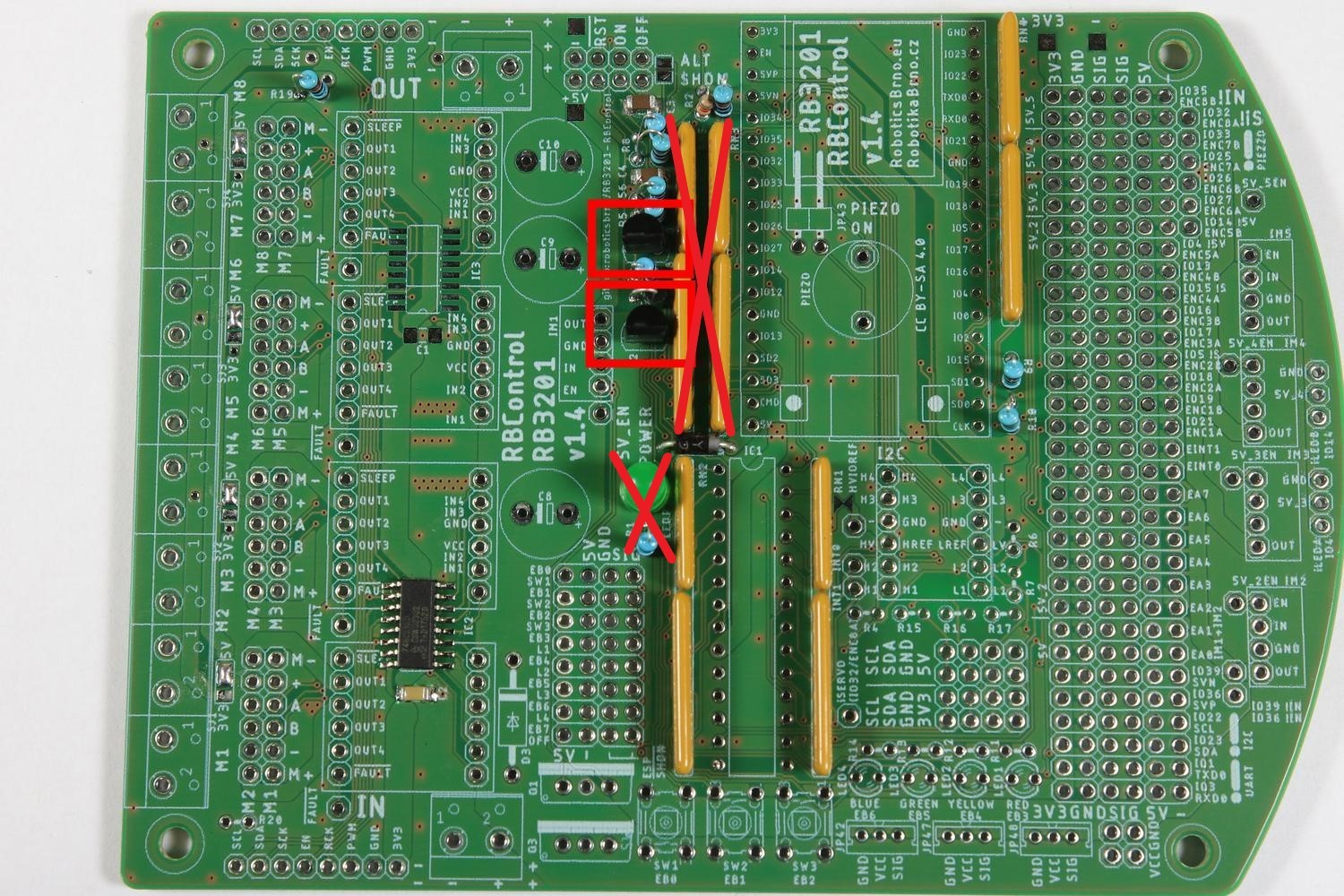
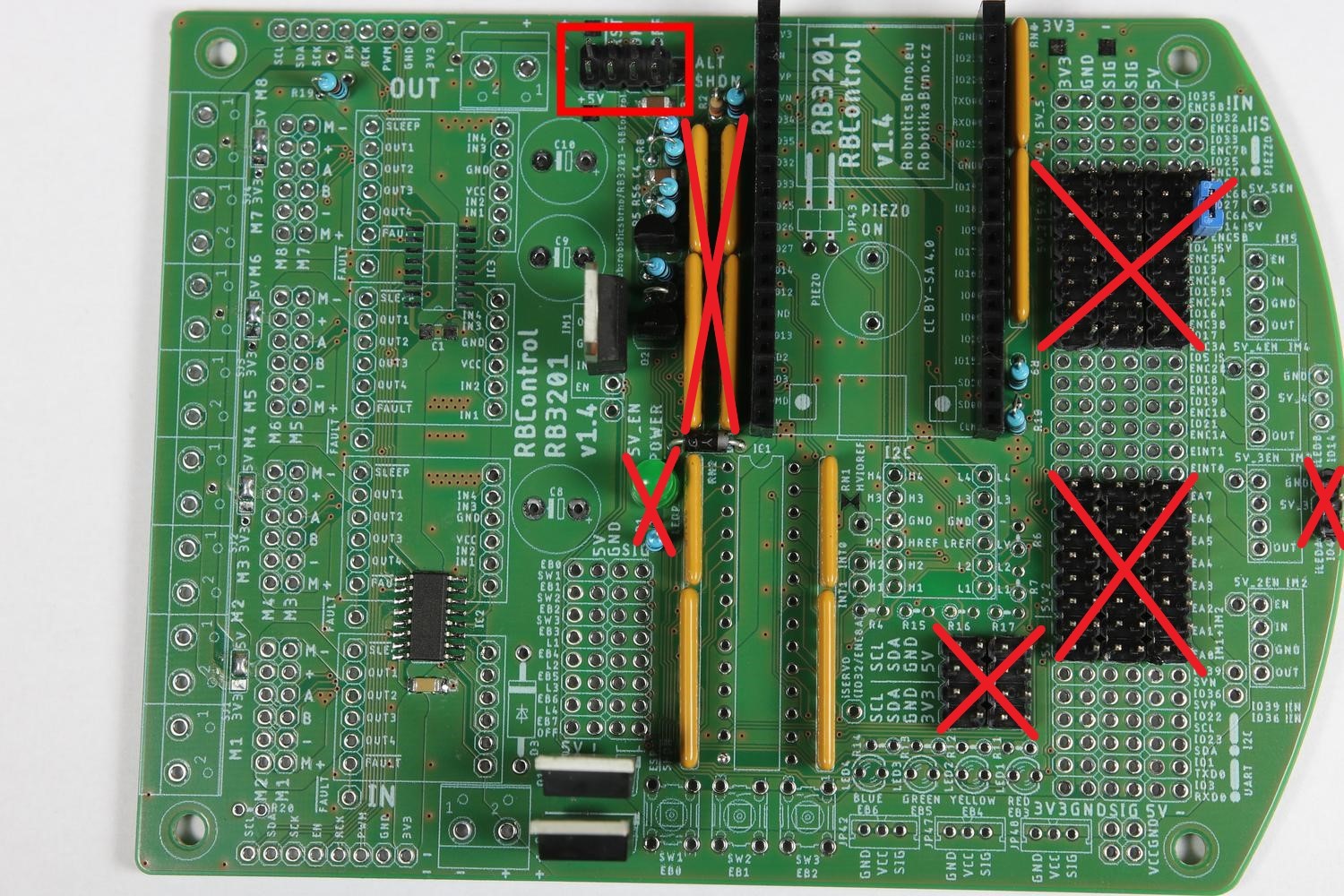
Spájíme zkratovací propojku (prostřední s 5V) dle obrázku.

5
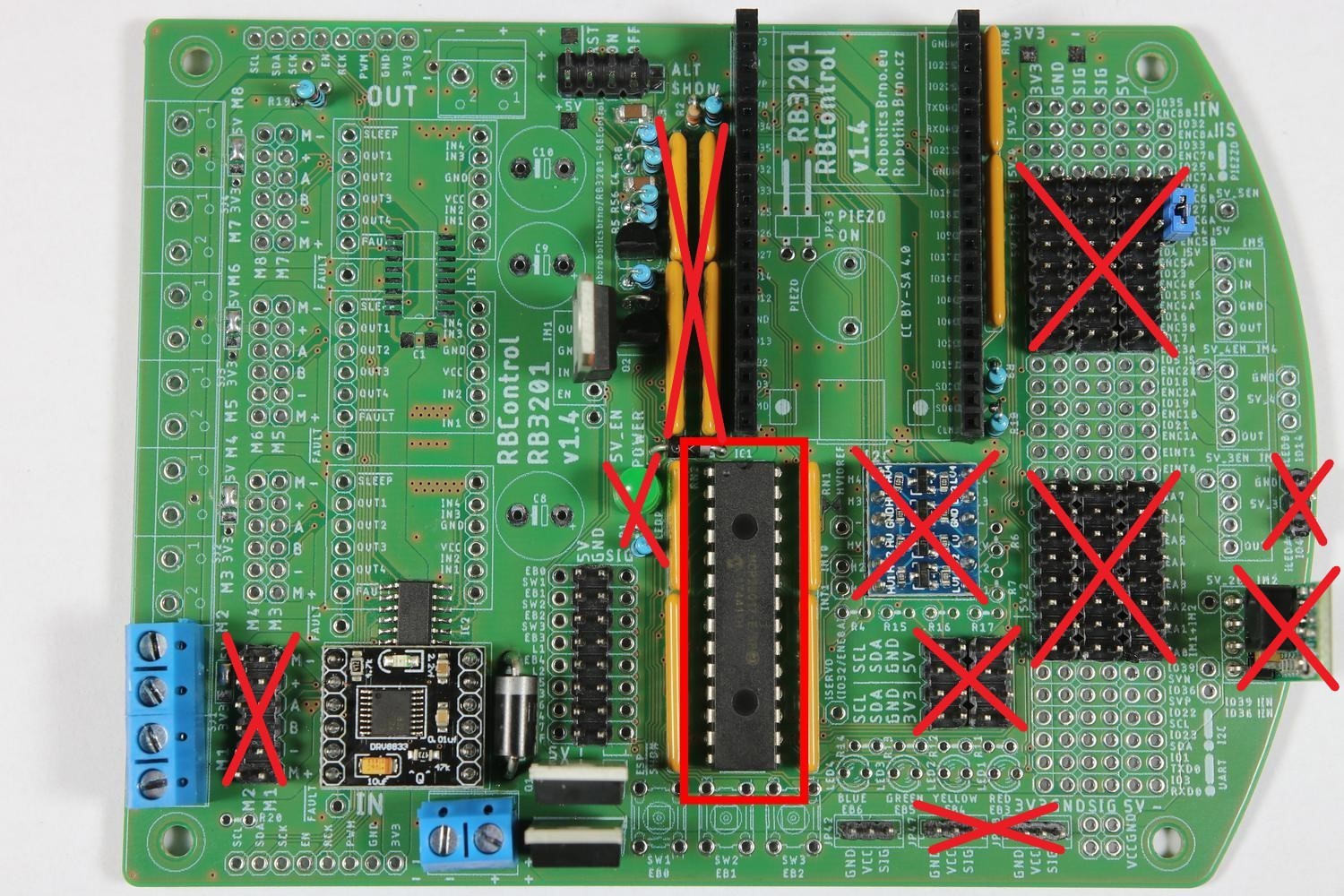
Osadíme 1ks čipu74HC595 (IC2). Dáváme si pozor na orientaci čipu. Tečka na čipu musí souhlasit s nakresleným zobáčkem na desce.
6
Osadíme SMD 1206 kondenzátor C2 s kapacitou 100 nF. Na polaritě nezáleží.
7
Osadíme SMD 1206 kondenzátory C3 a C4 s kapacitou 10 uF. Na polaritě nezáleží.
8
Osadíme diody D1 a D2. Bílý proužek na diodě musí v obou případech souhlasit s bílým proužkem nakresleným na desce.

9
Osadíme rezistorové sítě RN1, RN2, RN4. Na orientaci nezáleží. Na místo rezistorové sítě RN3 napájejte zkratovací propojku (kus drátu) nejvíce dole viz obrázek.
10
Osadíme rezistor R18 a R55. Jejich hodnota je 2 MOhm. Na polaritě nezáleží.
11
Osadíme rezistor R5. Jeho hodnota je 100 kOhm. Na polaritě nezáleží.
12
Osadíme rezistor R2. Jeho hodnota je 82 kOhm. Na polaritě nezáleží.
Poznámka: V rámci desek na robotickém táboře je místo odporů R2 a R3 osazen trimr a není tedy potřeba tyto odpory osazovat.
13
Osadíme rezistory R3, R8, R9, R10, R19 a R56. Jejich hodnota je 10 kOhm. Na polaritě nezáleží.
Poznámka: V rámci desek na robotickém táboře je místo odporů R2 a R3 osazen trimr a není tedy potřeba tyto odpory osazovat.
14
Osadíme tranzistory Q2 a Q4 BS170. Zploštělá strana tranzistoru musí souhlasit se zploštěním nakresleným na desce.
15
Osadíme dutinkové lišty 1x19 pro ESP32 mikrokontrolér. Tyto lišty nám umožní vyměňovat ESP32 DevKitC.
16
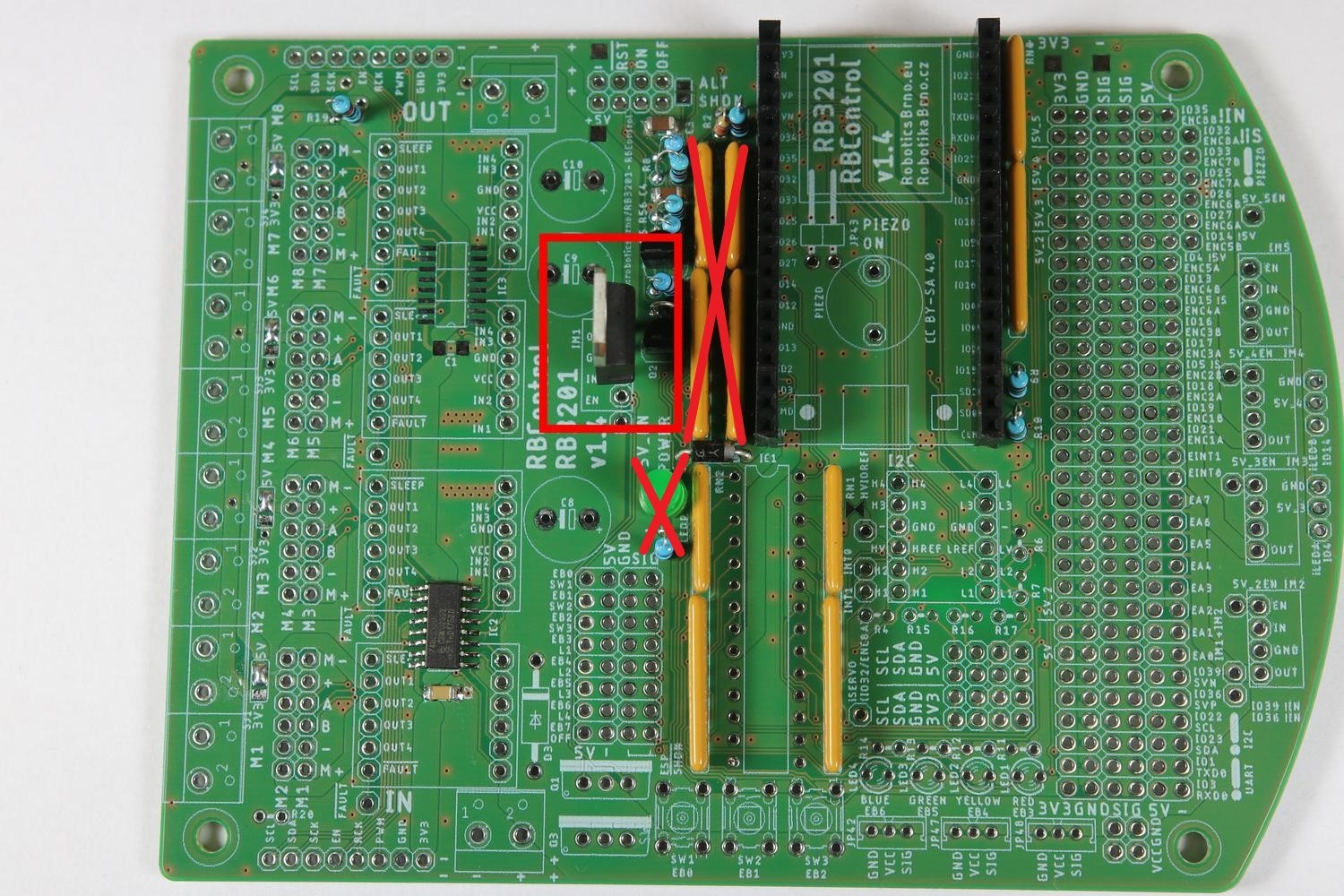
Osadíme stabilizátor 7805. Chadicí hliník na stabilizátoru musí být orientován směrem k popiskům. Stabilizátor připájíme k pinům OUT, GND a IN. Pin EN necháme volný.
17
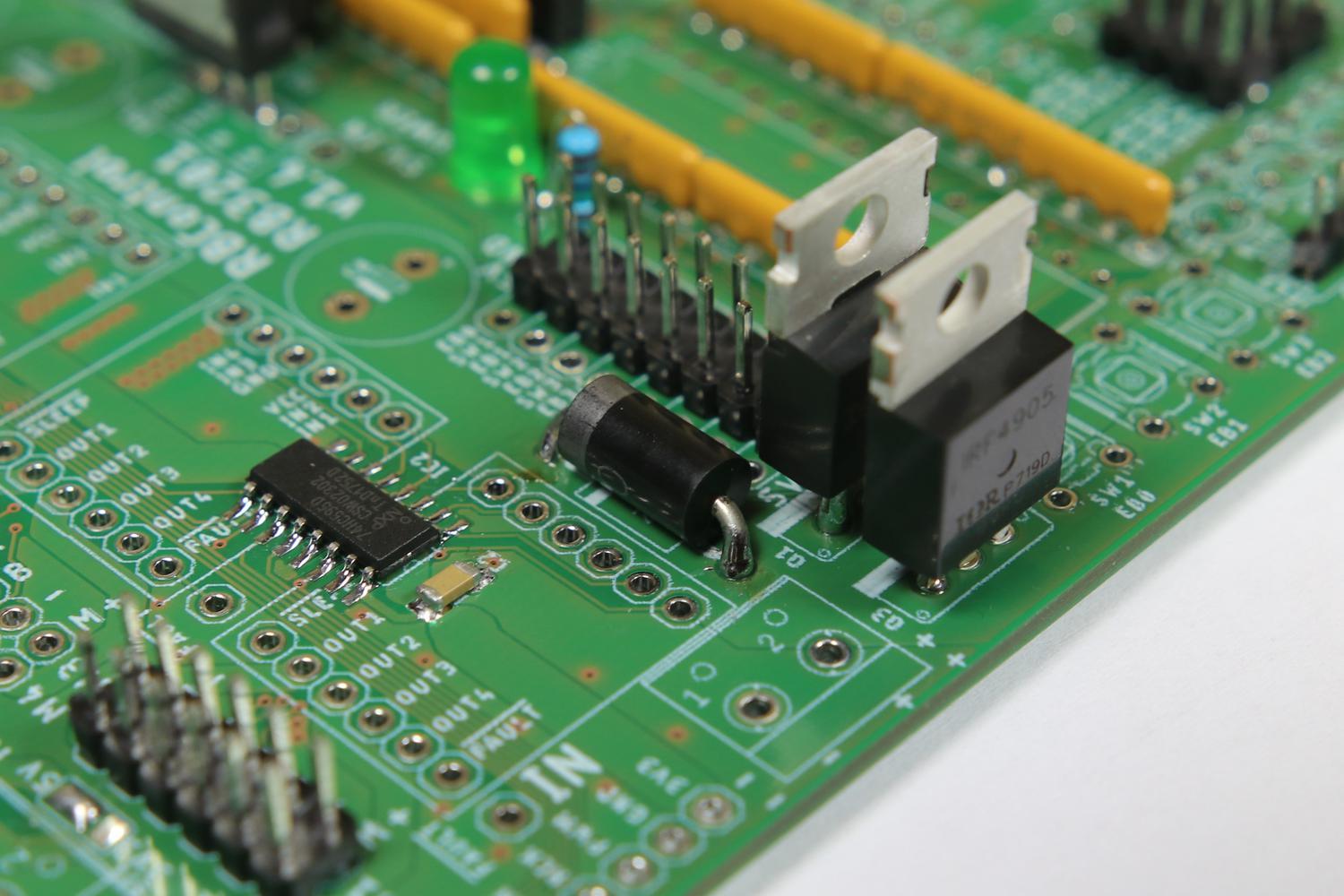
Připájíme výkonové tranzistory Q1 a Q3 IRF4905 (Q3 funguje jako ochrana proti přepólování). Chladicí hliník na tranzistoru musí souhlasit s bílým proužkem na desce.
18
Připájíme pinheady 2x4 podle obrázku. Tyto pinheady slouží k zapínaní, vypínaní a resetování desky.

19
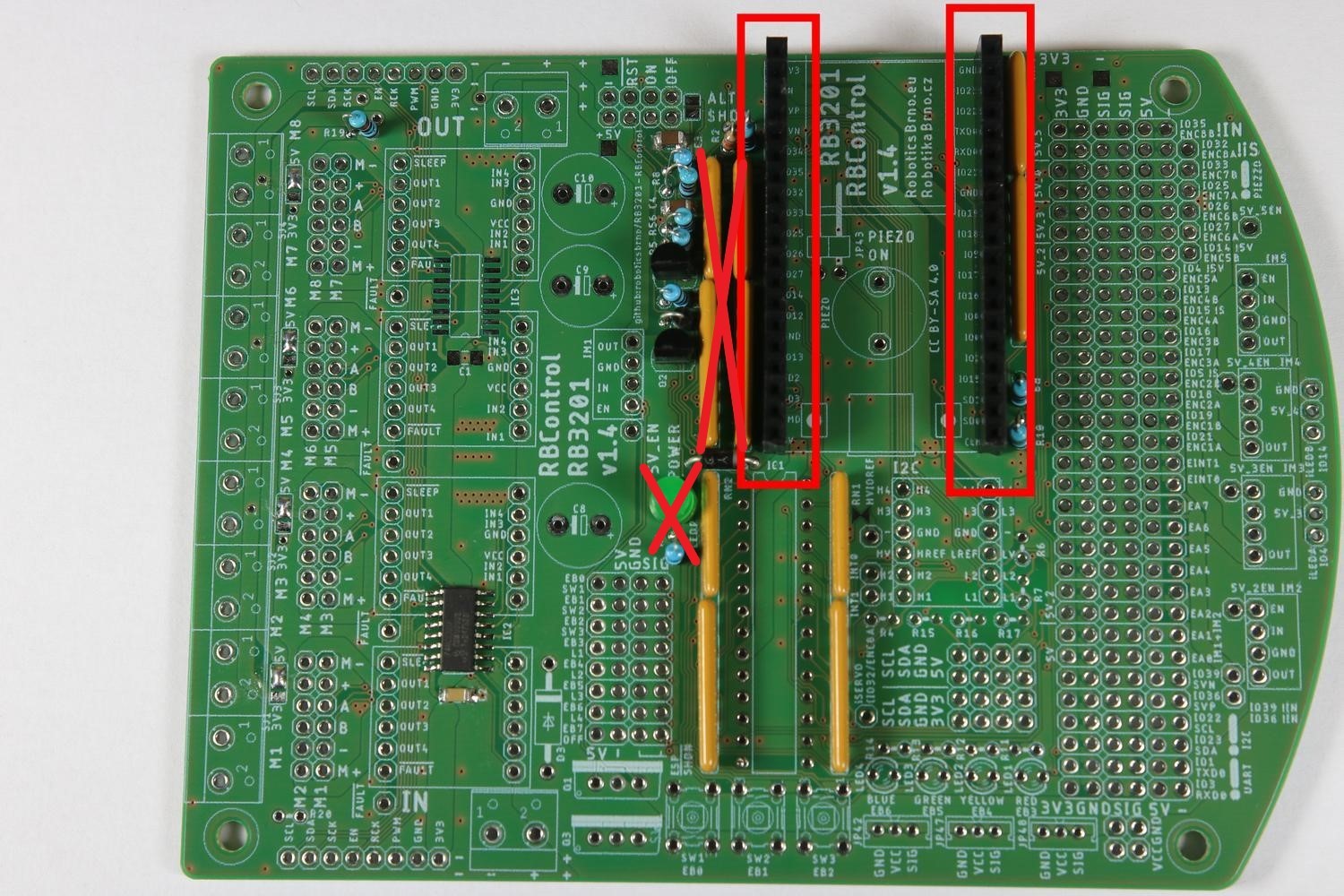
Připájíme pinheady 2x8 podle obrázku. Tyto pinheady slouží k připojení horní desky s tlačítky a LEDkami (UIBoard).
20
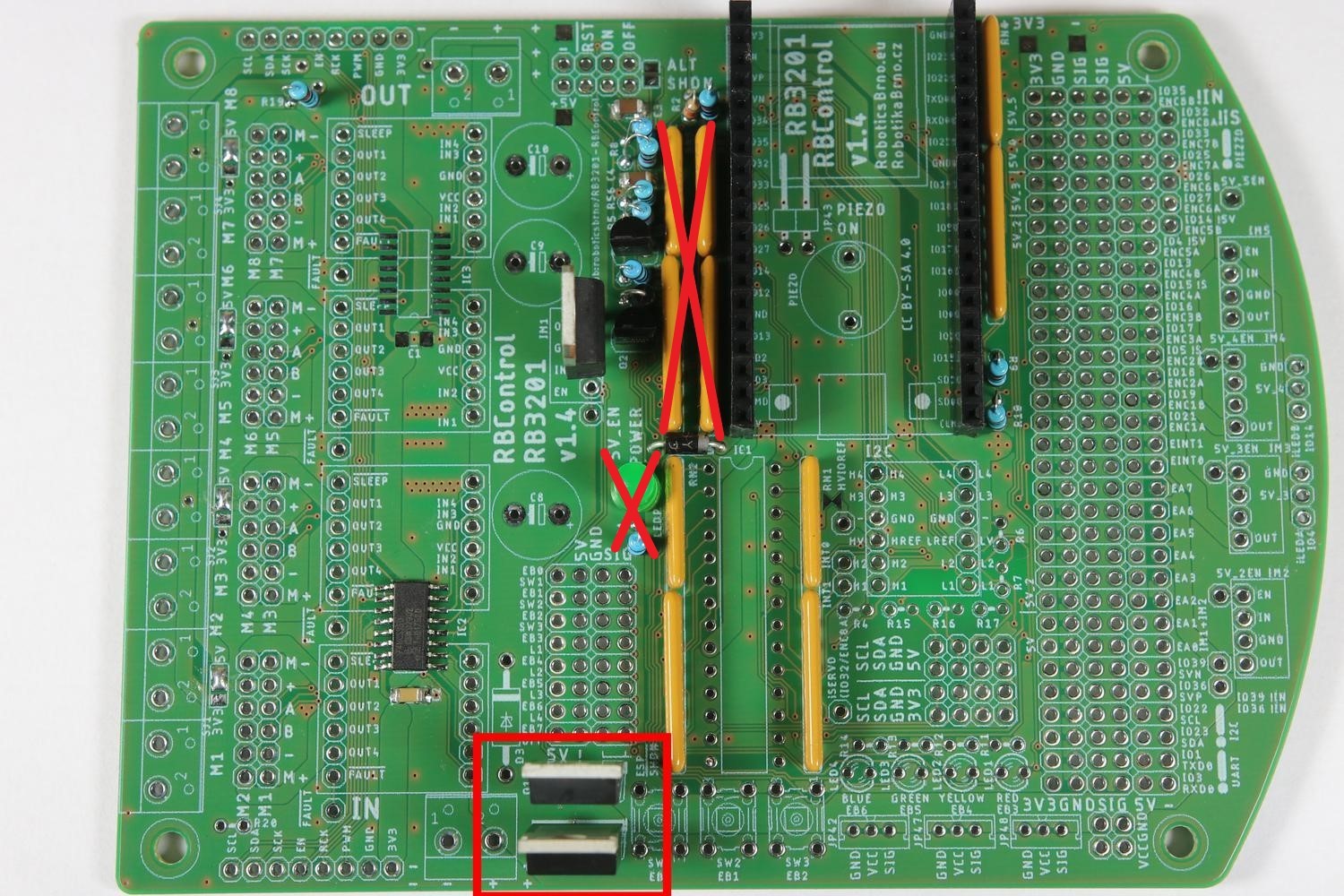
Připájíme pinhead 1x3 podle obrázku. Pozor, má rozteč pouze 2 mm oproti standardním 2.54 mm! Tento pinhead slouží pro připojení inteligentních serv LX-15D.

21
Vezmeme si velkou diodu a ucvakneme jí nožičky dle obrázku.
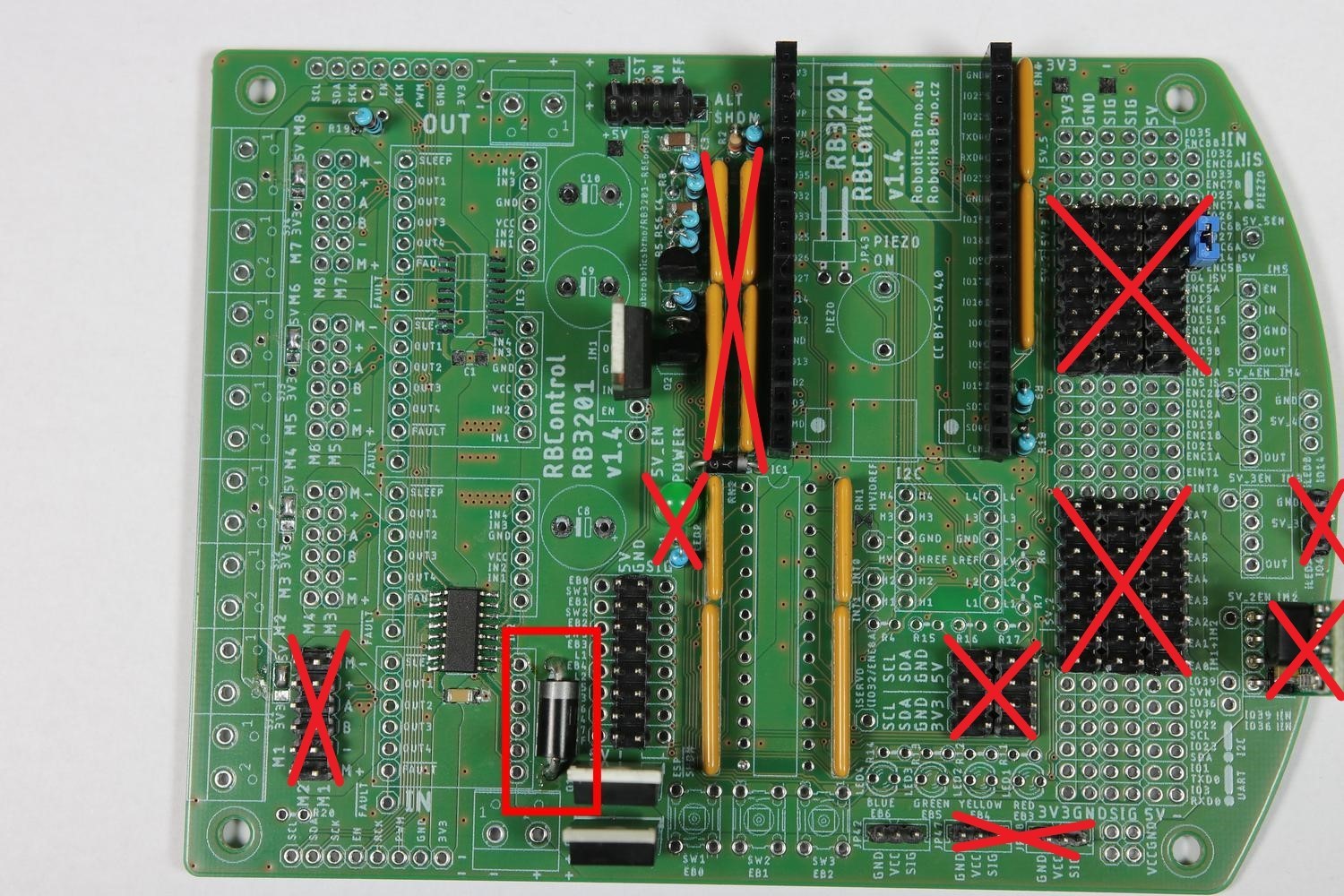
22
Připájíme diodu D3 k desce. Bílý proužek na diodě musí souhlasit s bílým proužkem nakresleným na desce.
23
Správně připájená dioda k desce.
24
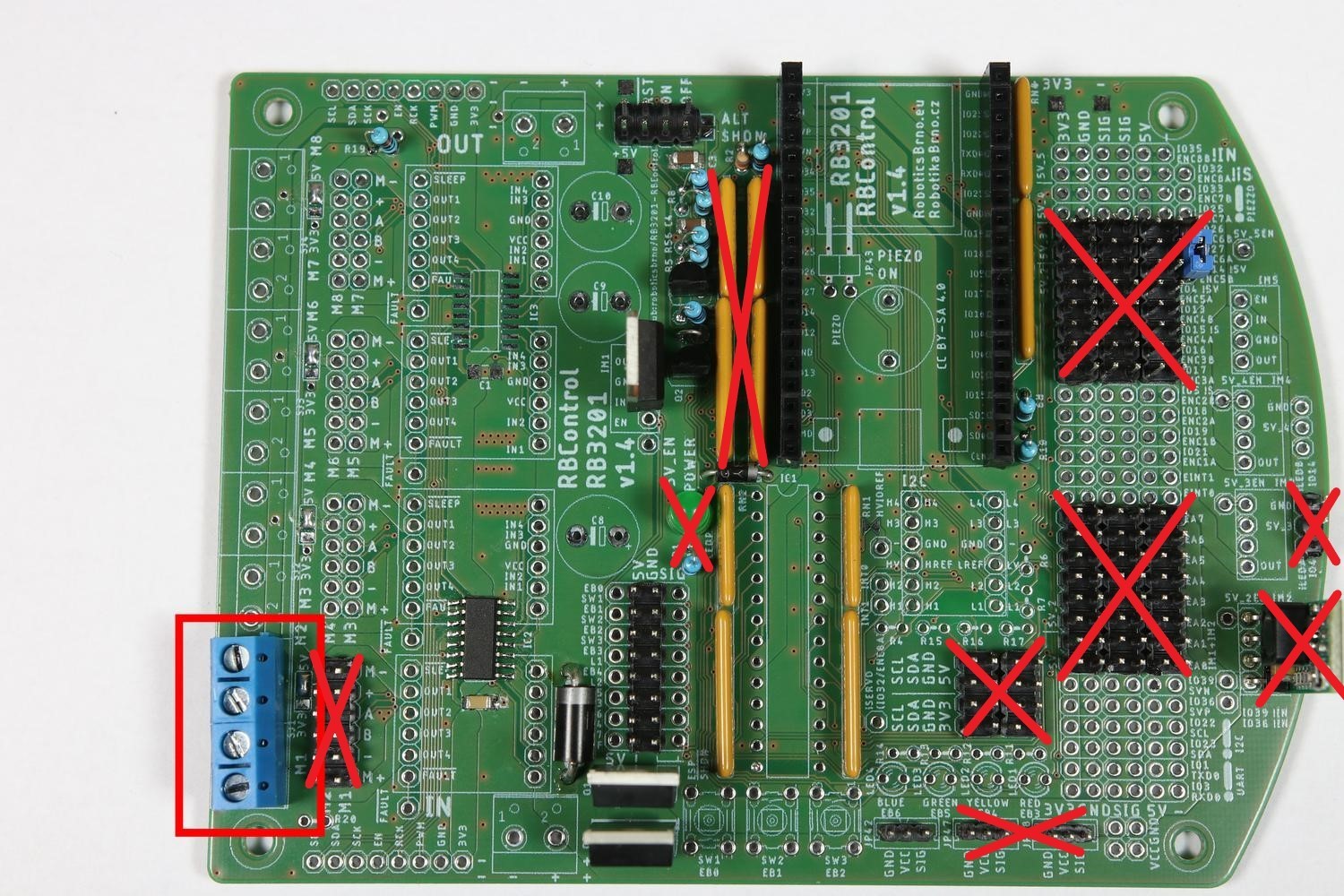
Připájíme svorkovnice M1 a M2. Nejprve je zacvakneme vedle sebe a teprve potom spojené připájíme k desce otvory směrem ven z desky.

25
Připájíme svorkovnici IN otvory směrem ven z desky.

26
Nachystáme si regulátor DRV8833 podle obrázku. Přiložené pinheady připájíme (delší částí nahoru) nejprve k regulátoru a teprve potom celou součástku s pinheady připájíme k desce.
27
Připájíme nachystaný regulátor DRV8833 k desce dle obrázku.
28
Připájíme expandér do desky dle obrázku. Vykousnutí na expandéru musí souhlasit s nakresleným vykousnutím na desce.
29
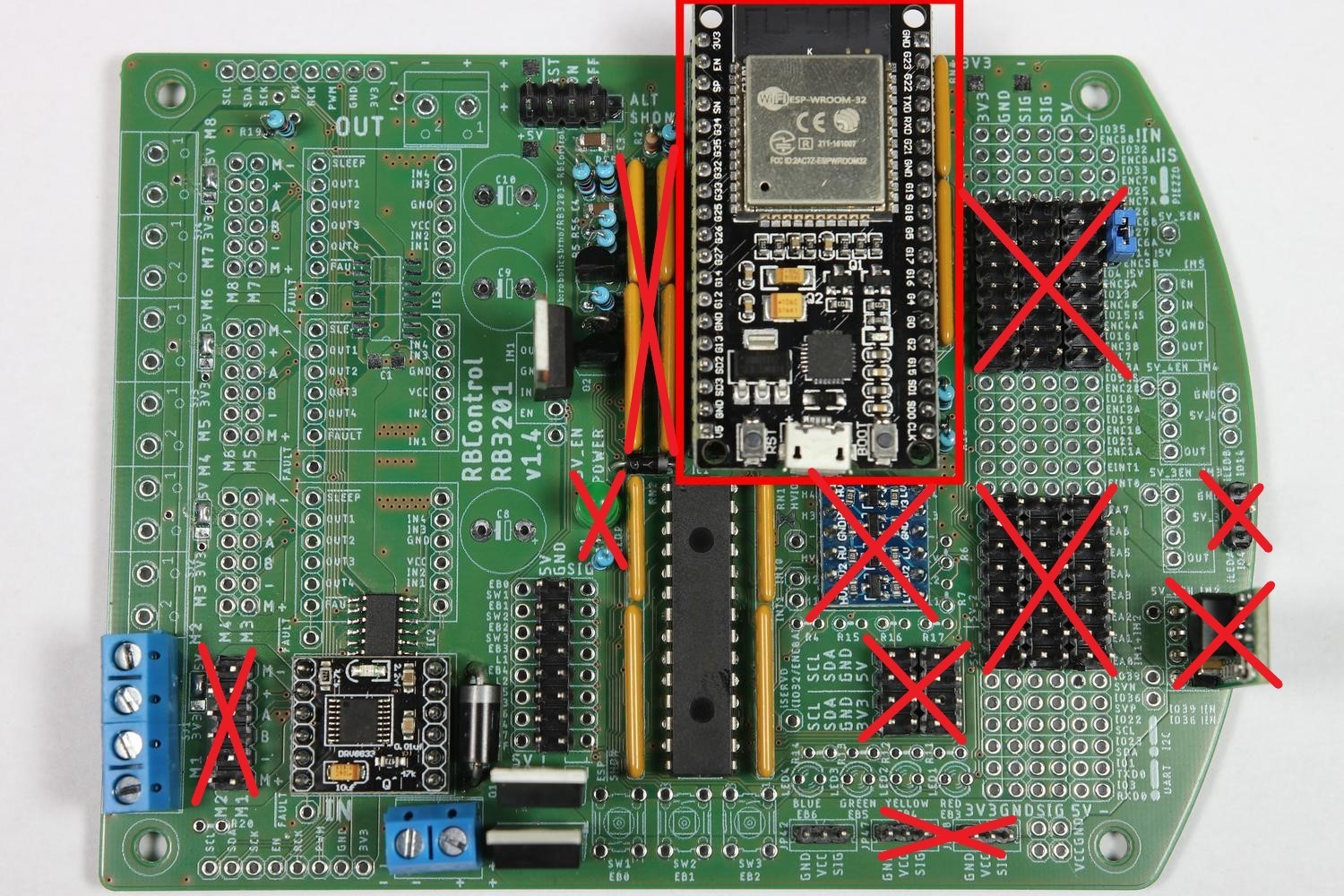
Nakonec vložíme do připájených dutinek ESP32 DevKitC, který obsahuje procesor ESP32. Pomocí tohoto procesoru budeme celou Roboruku řídit. Pozorně se podívejte na nákres na desce a ESP32 DevKitC vložte podle obrázku.
30
Kompletní osazení desky pro Roboruku.
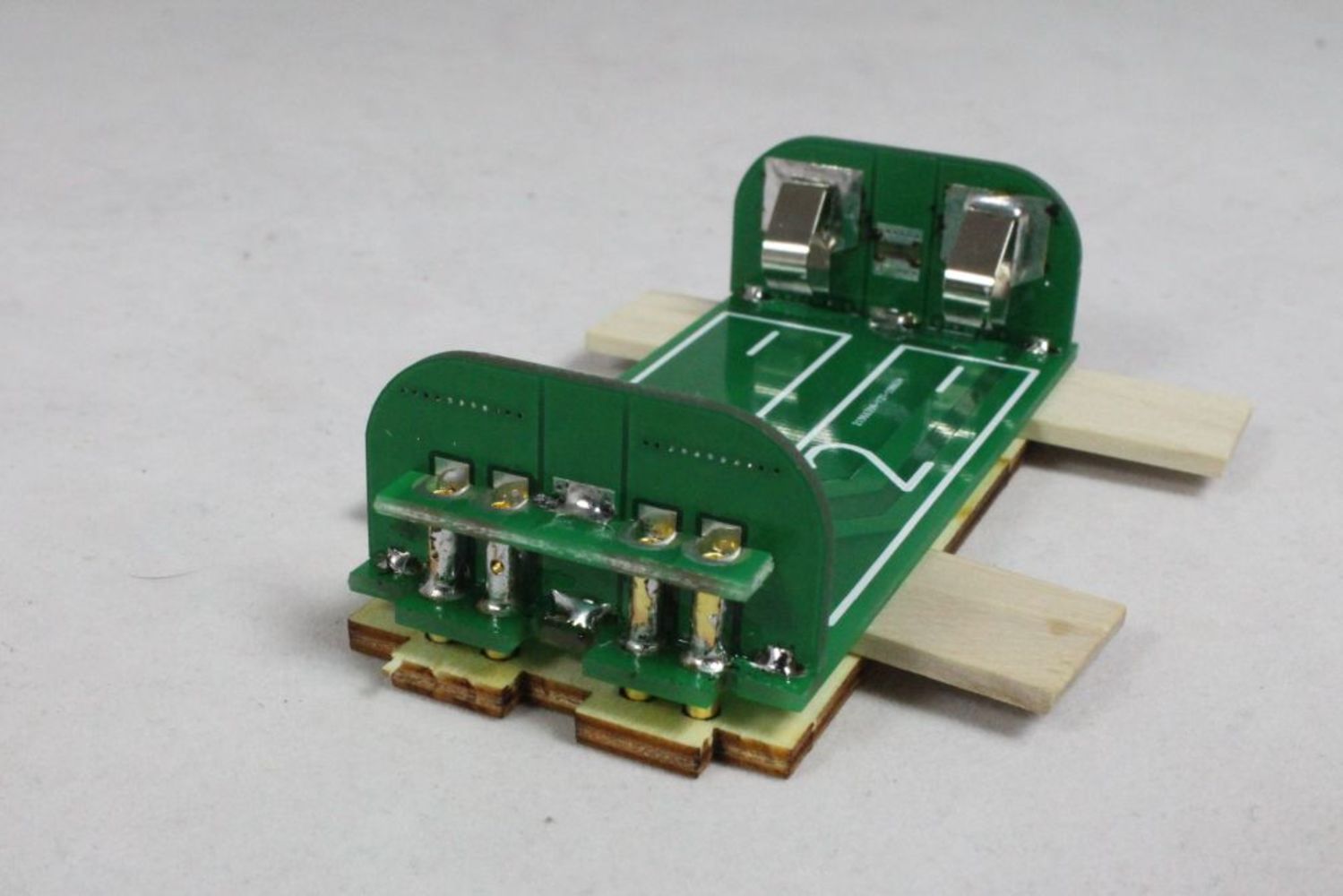
Battery pack

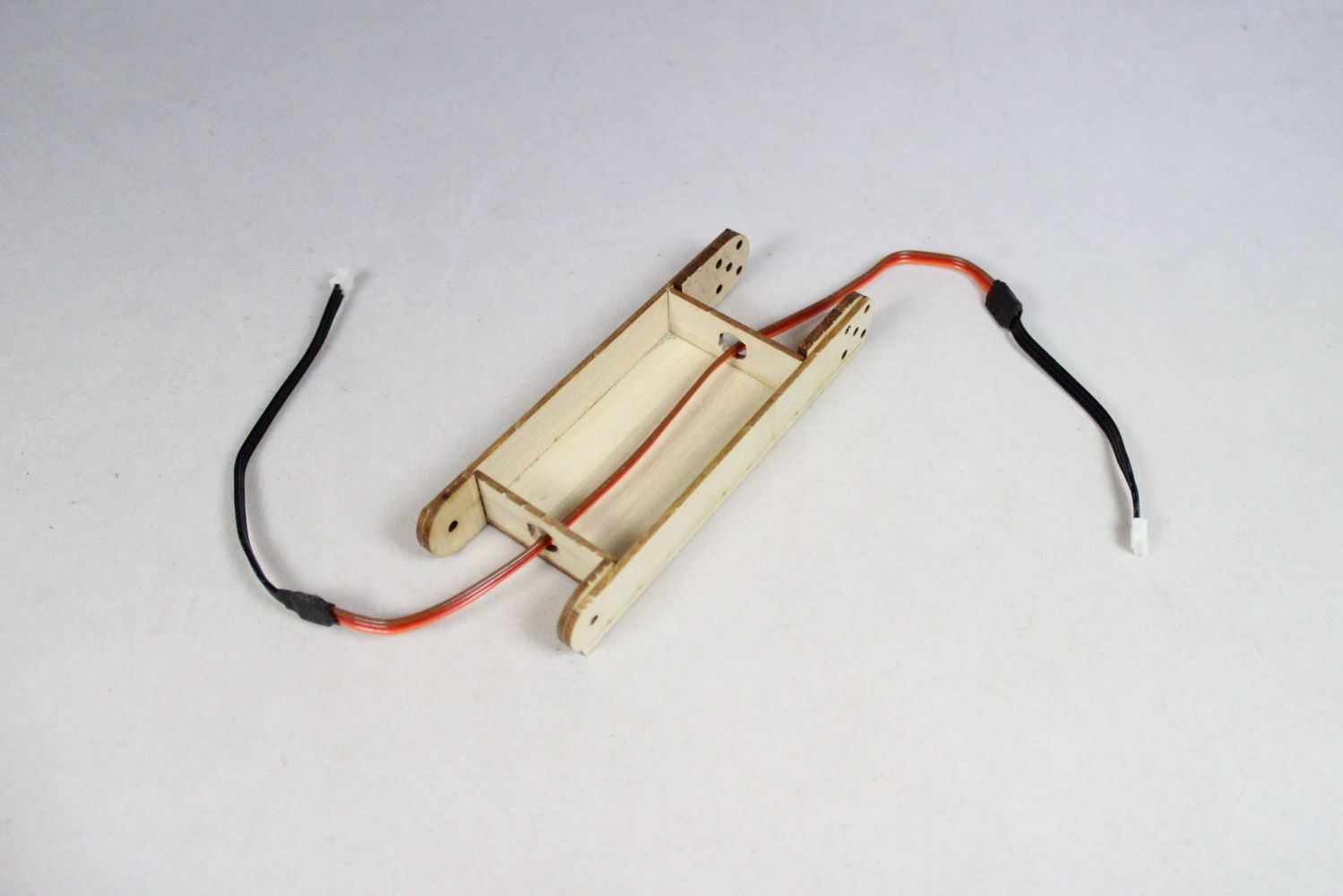
1
Všechny části battery packu.
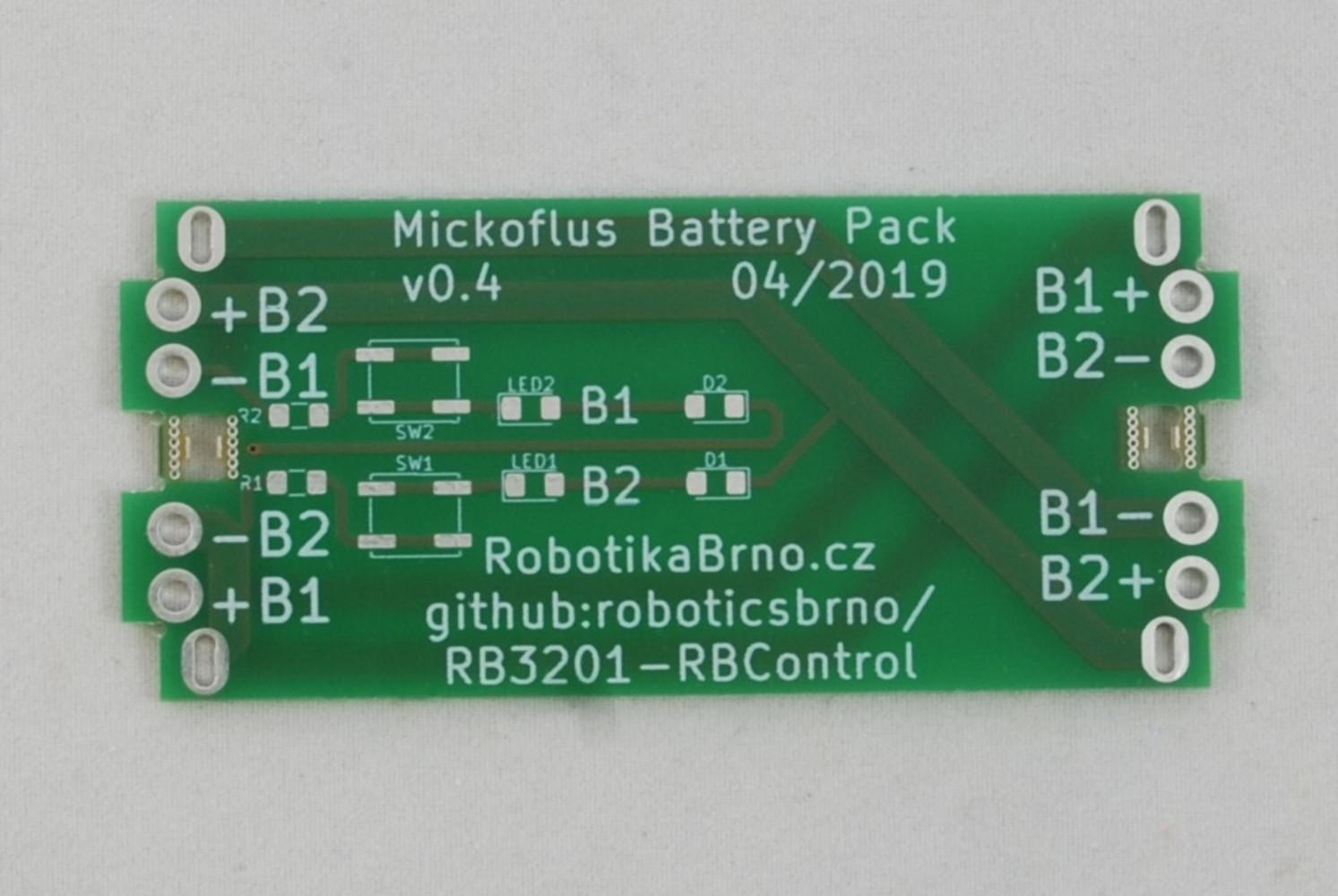
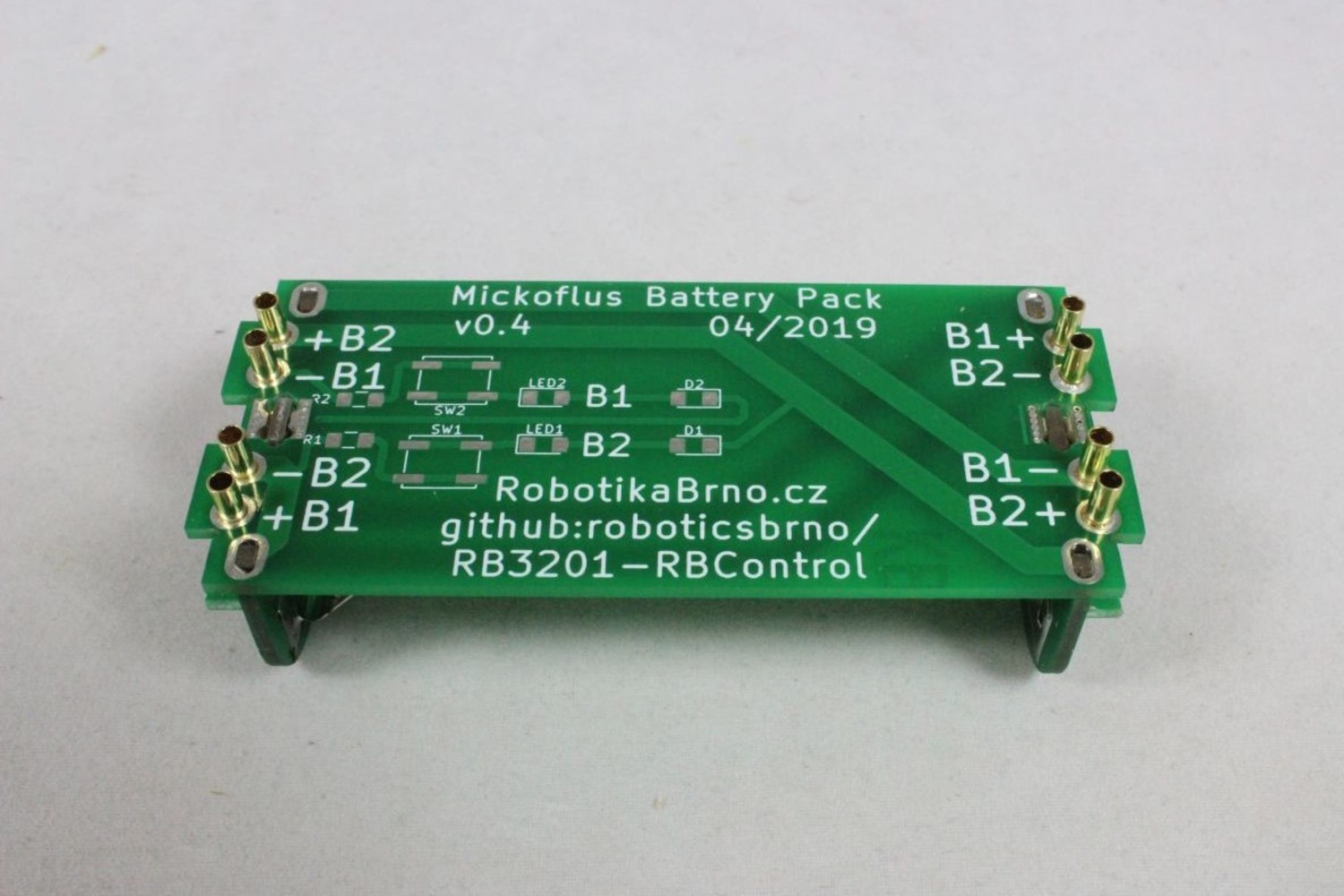
2
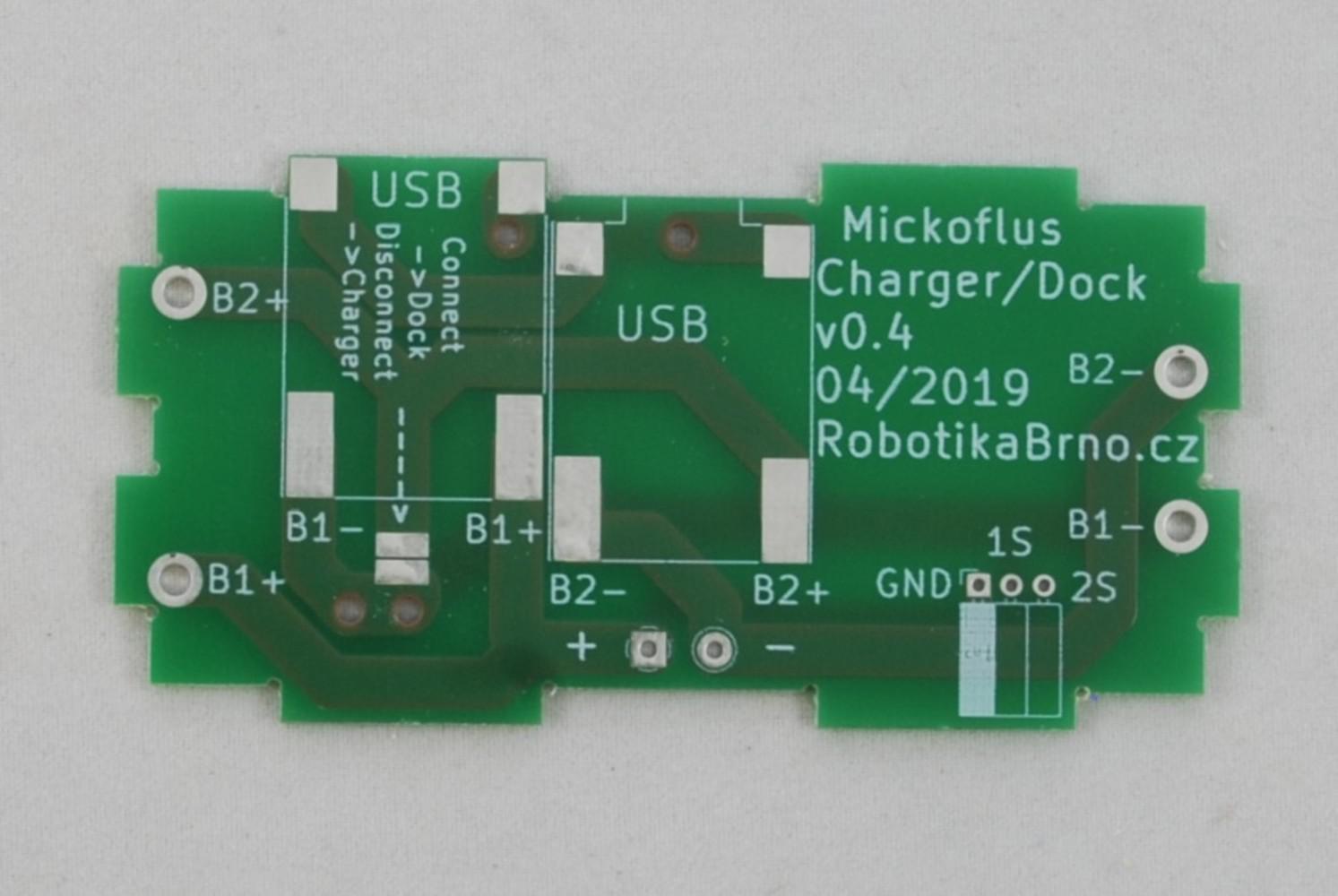
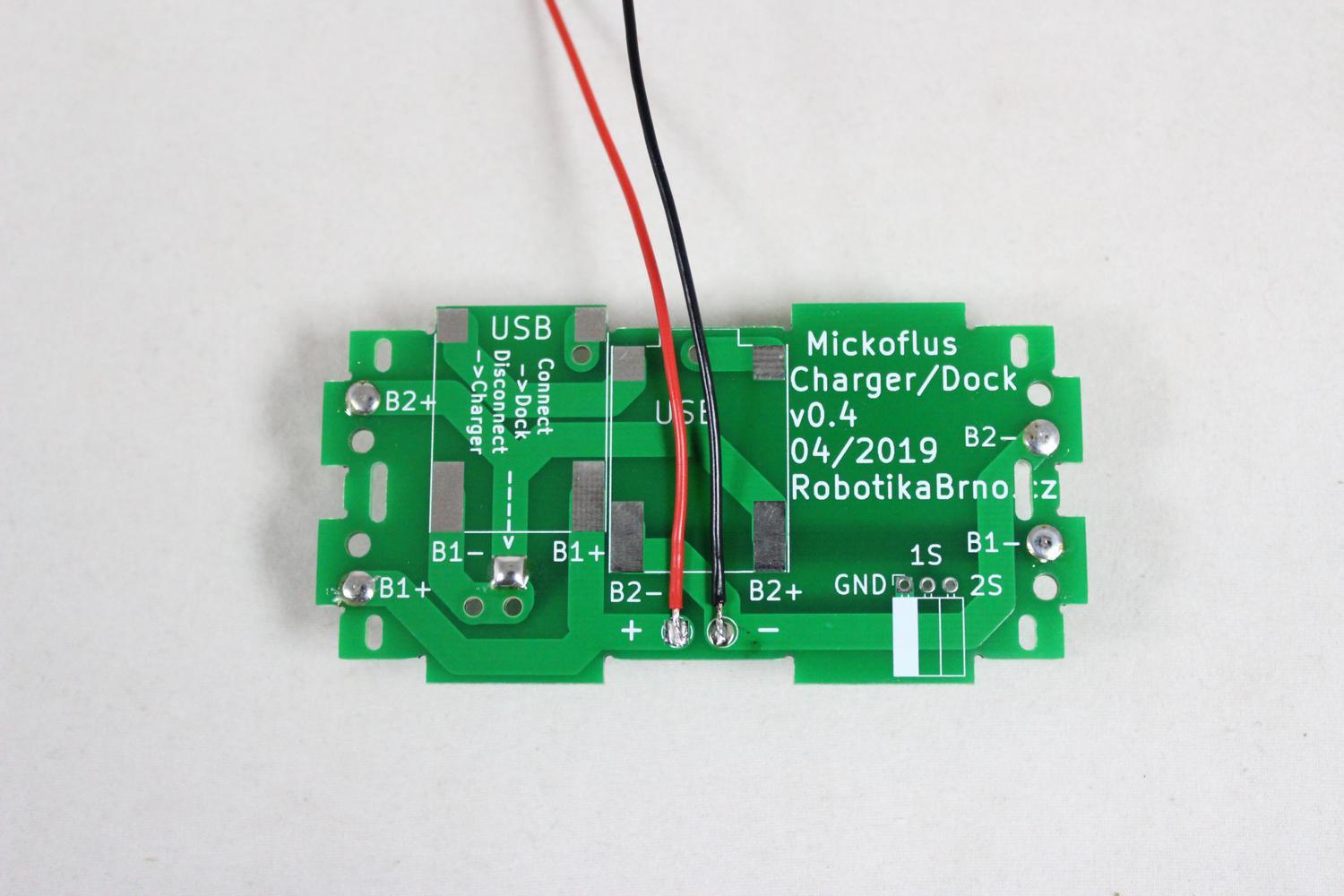
Nabíječka pro battery pack.
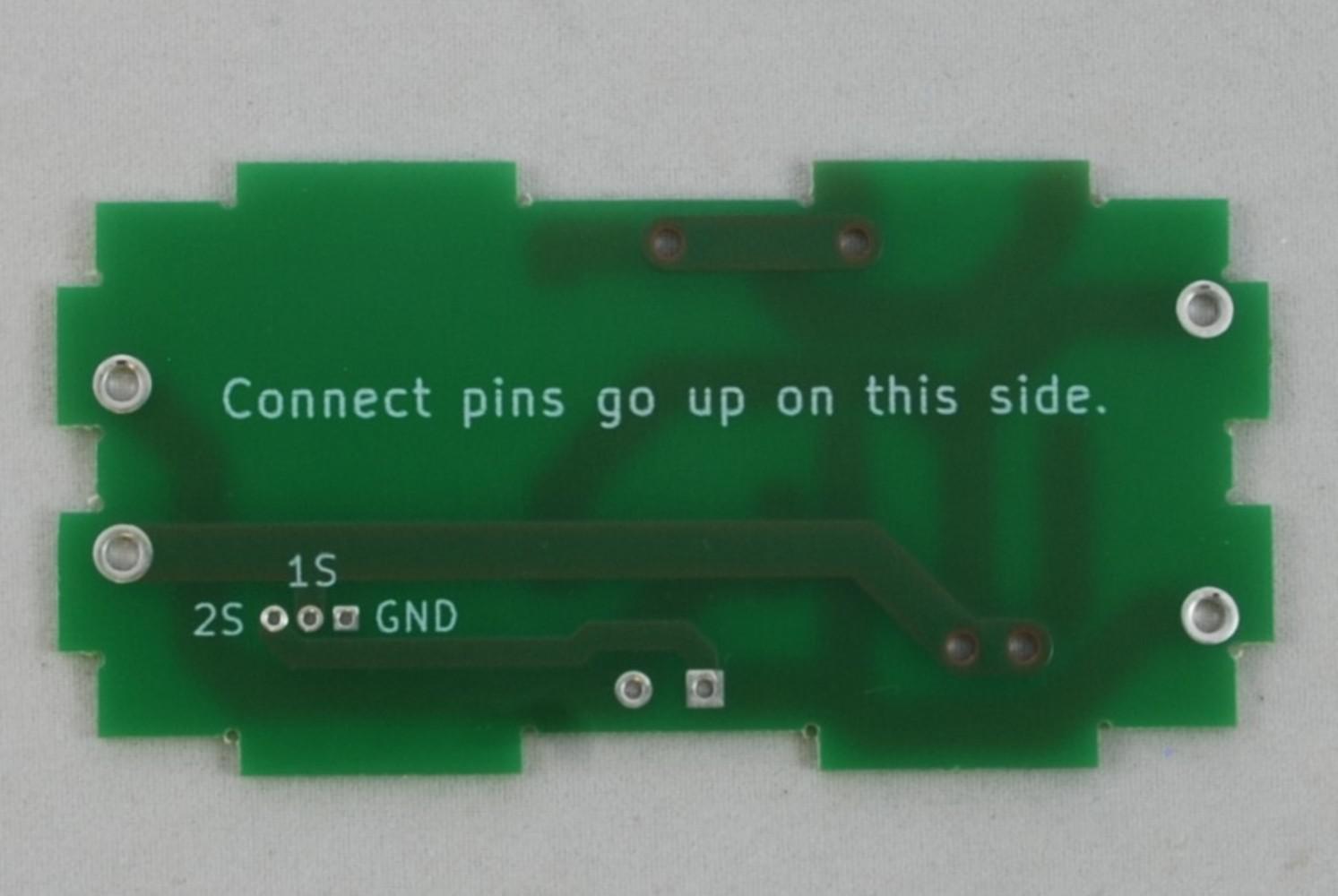
3
Zadní strana nabíječky pro battery pack.

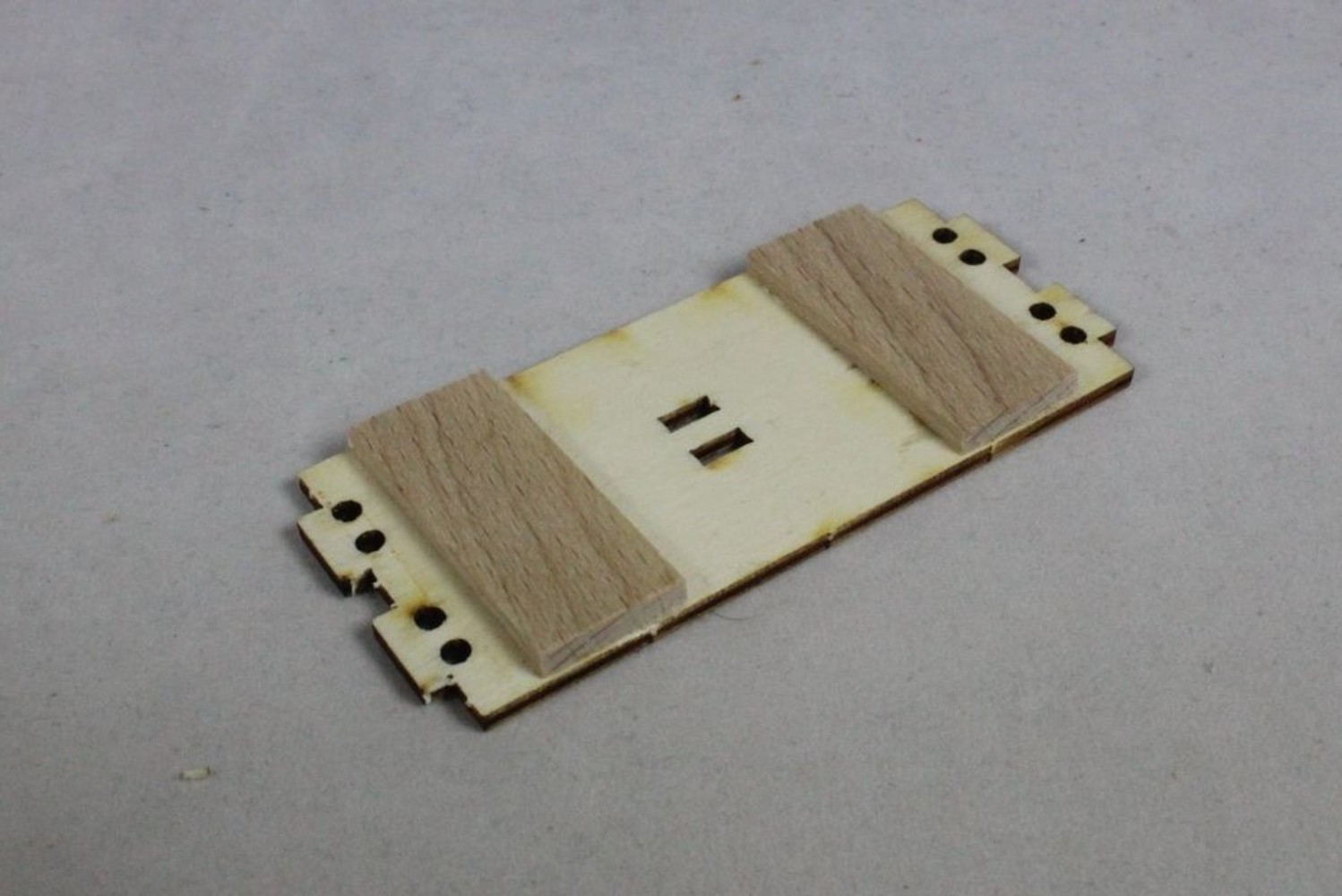
4
Vnitřní strana battery packu.
5
Vnější strana battery packu.
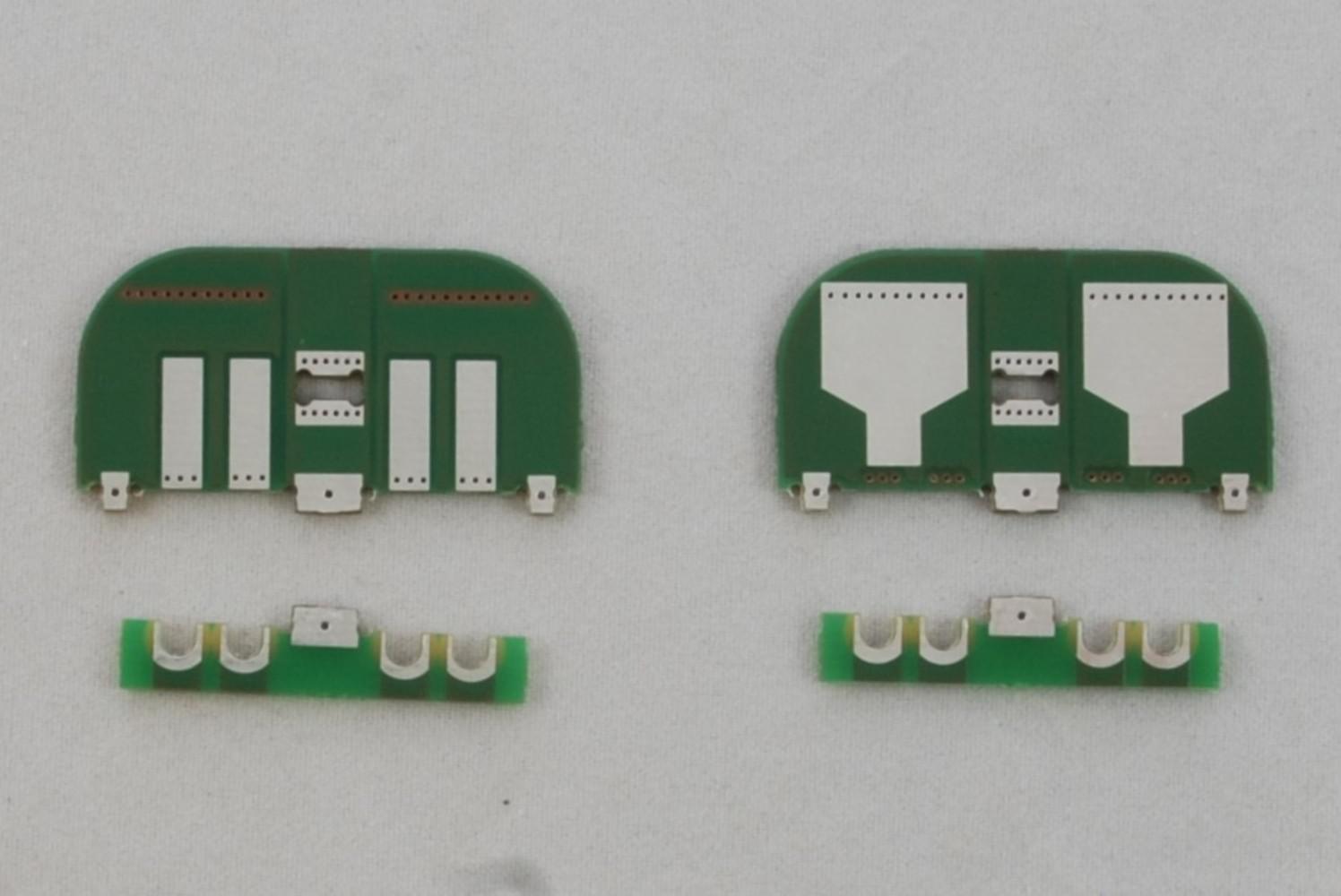
6
Boční stěny battery packu.

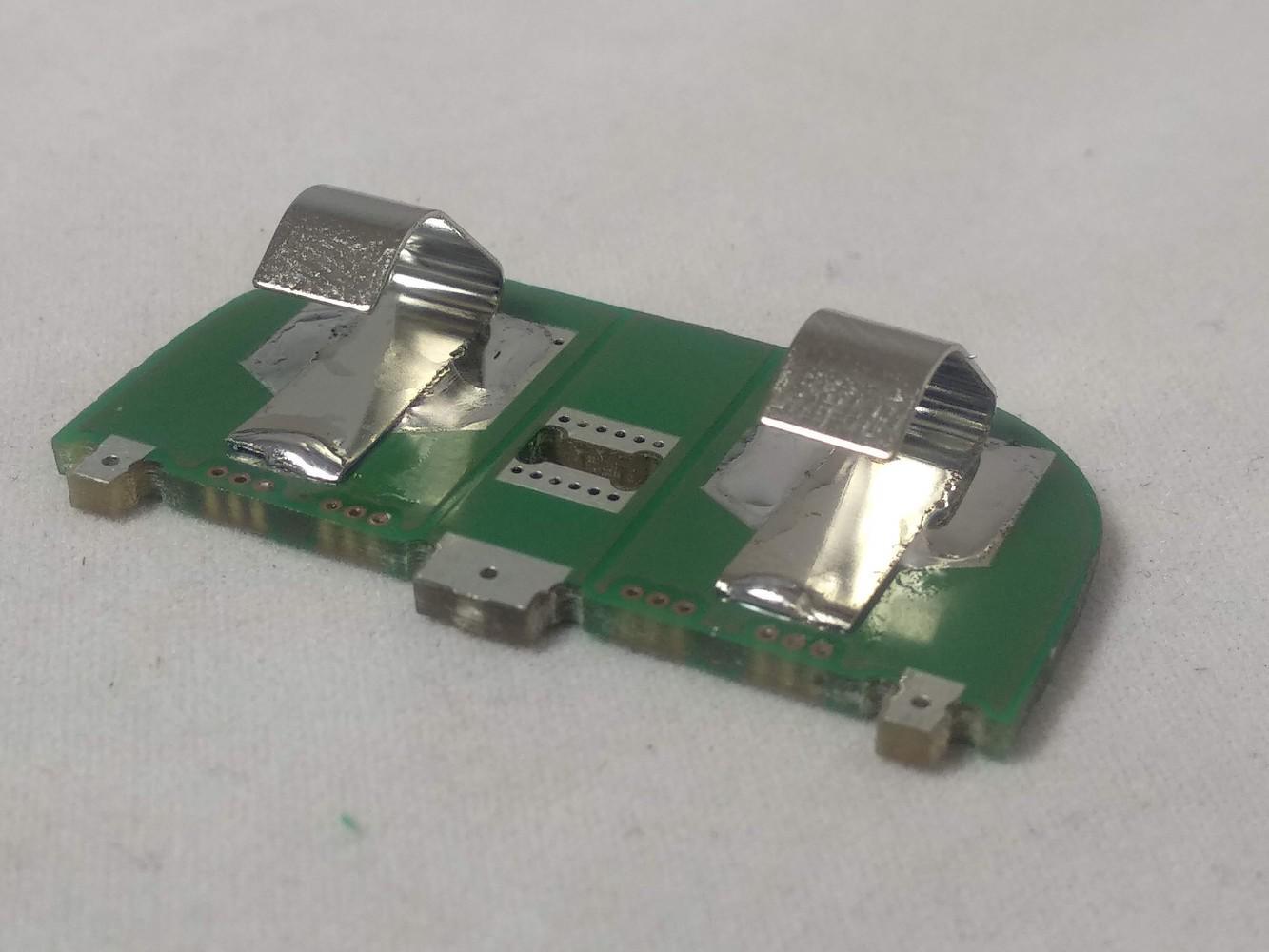
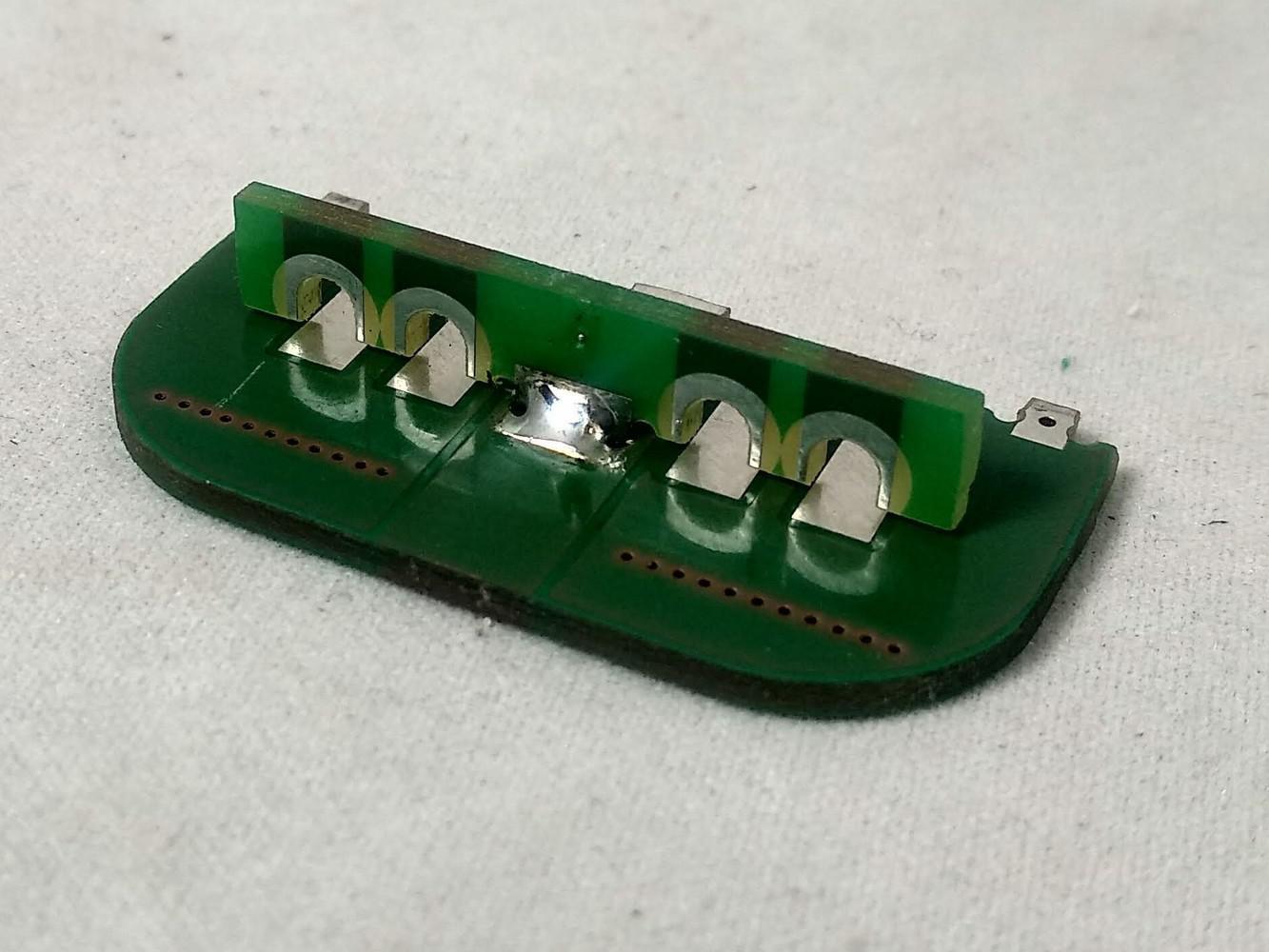
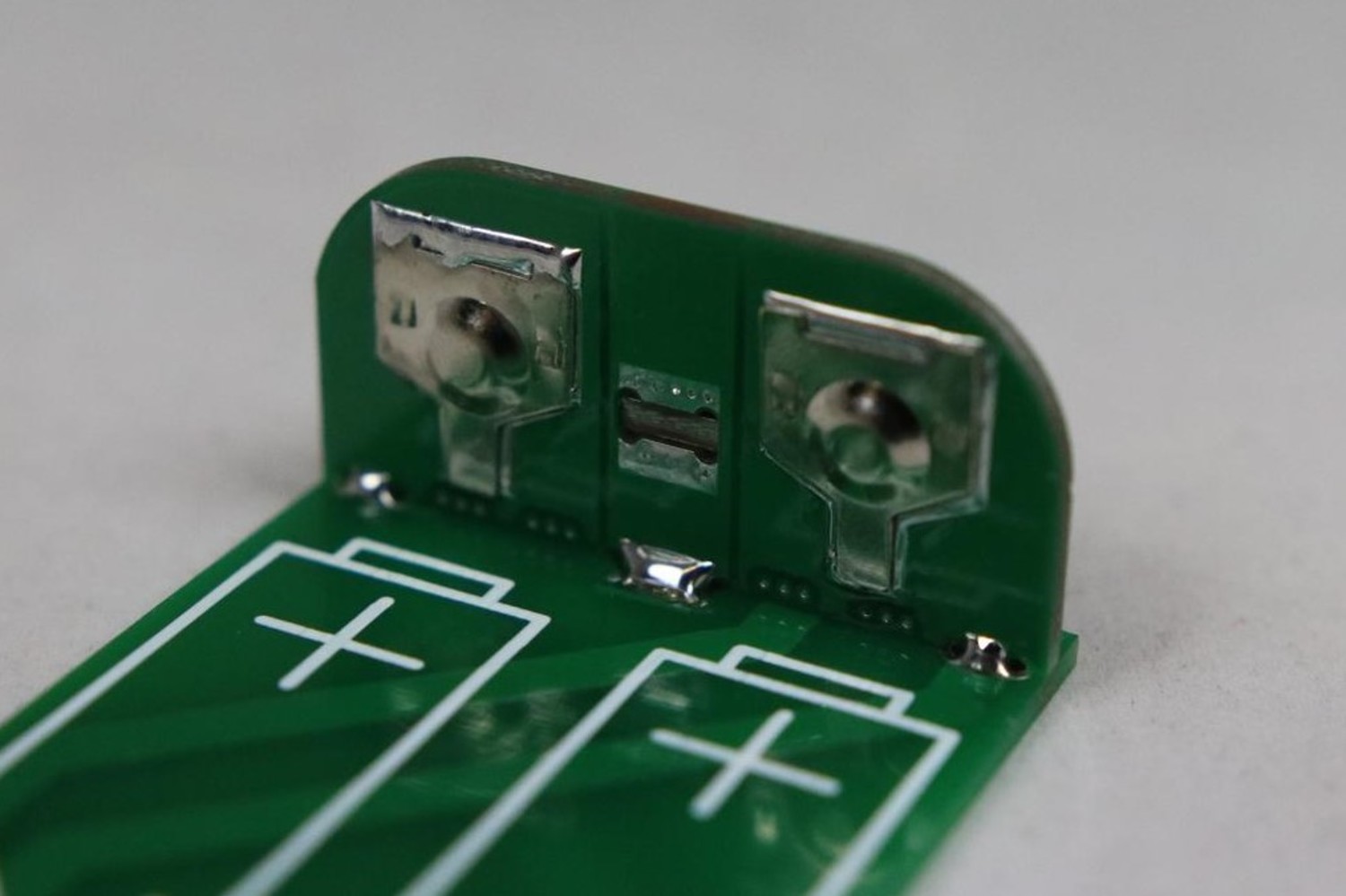
7
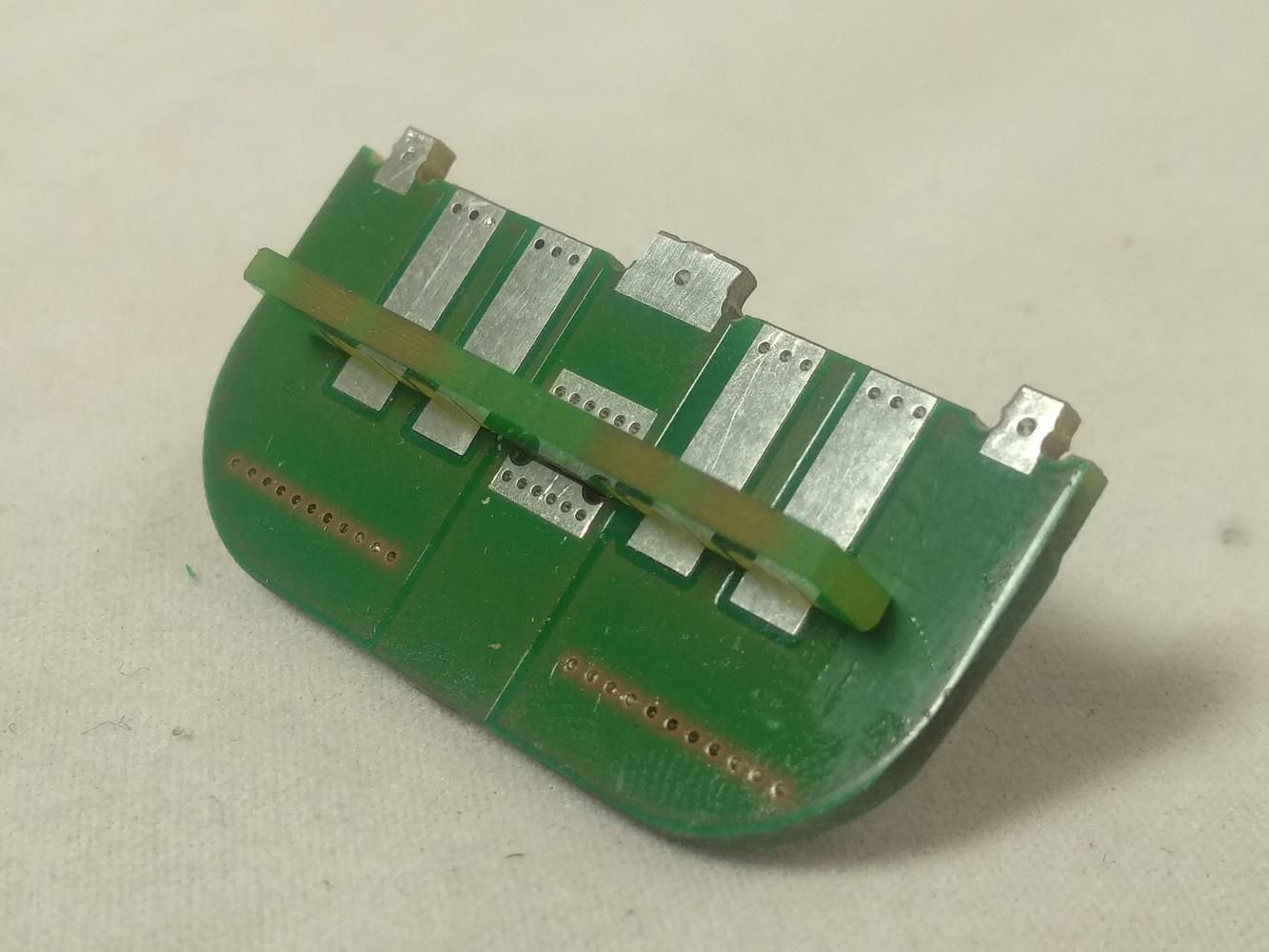
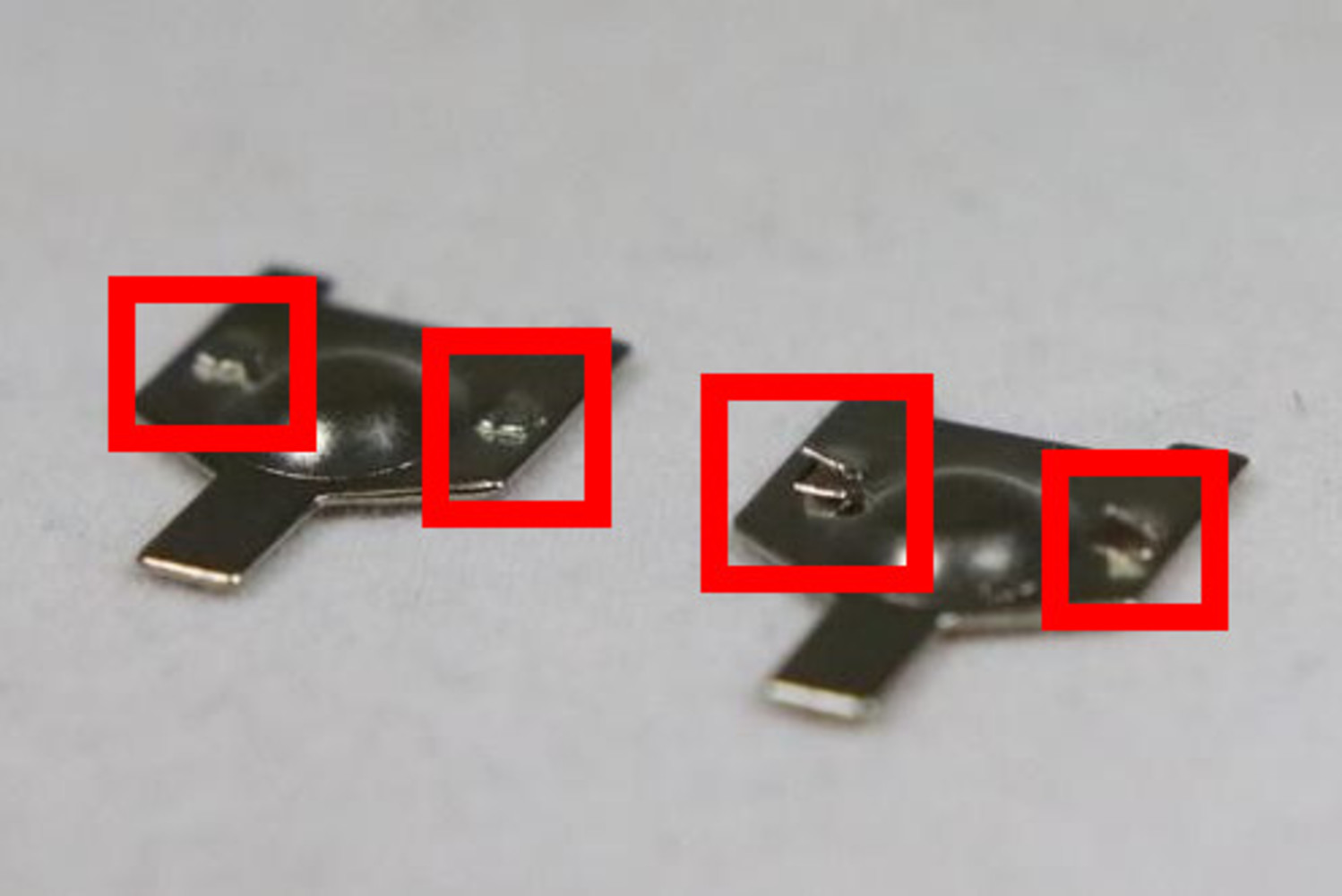
Kontakt pro baterie.

8
Ucvakněte část kontaktu dle obrázku.
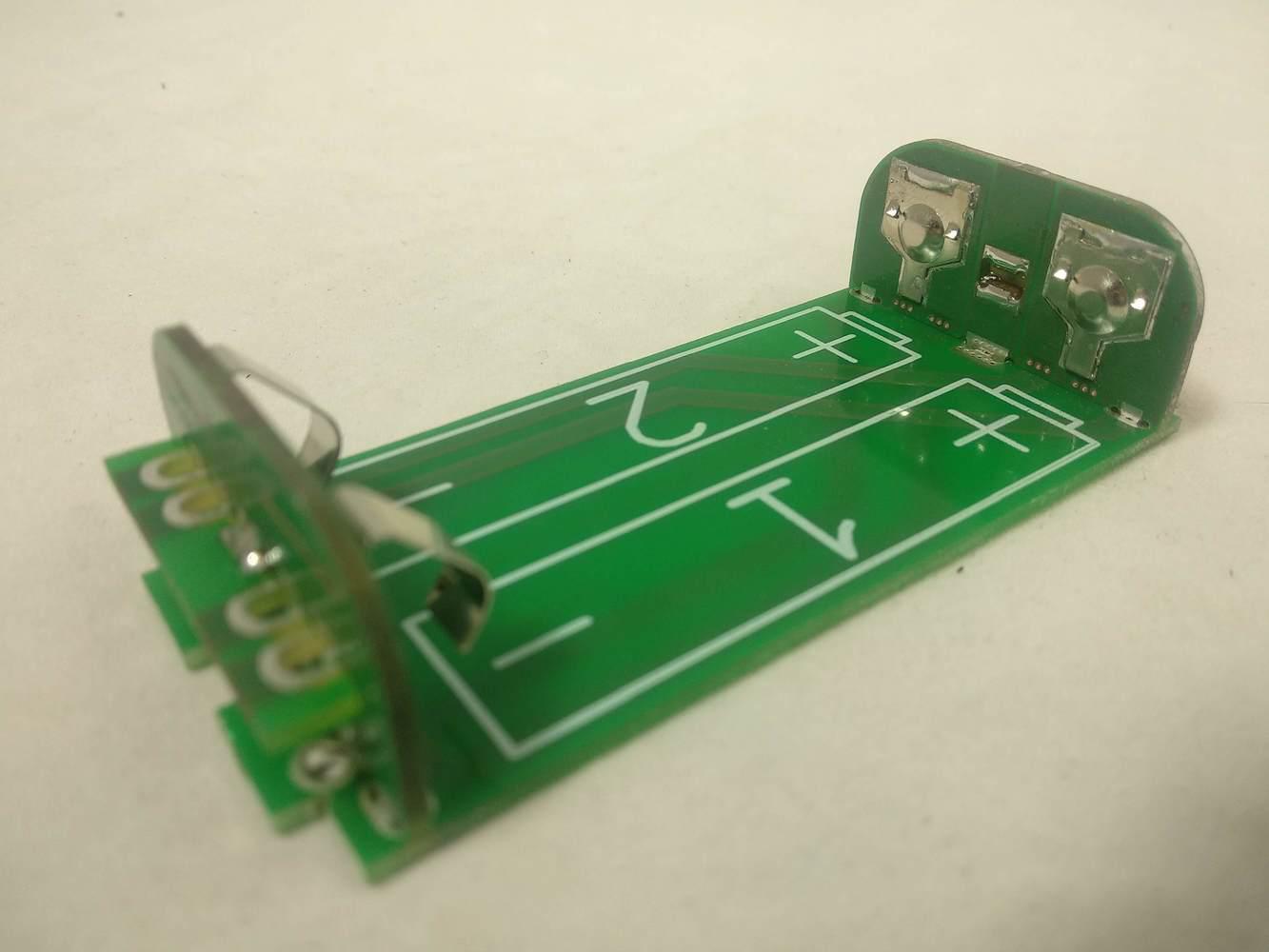
9
Připájejte kontakty k boční stěně battery packu. Díl je nutné hodně prohřát, protože plochy jsou hodně velké. Naneste tavidlo a poté přiložte kontakt. Kontakt přidržte pinzetou a přiložte pájku s cínem.
10
Vložte držák pro dutinky do boční stěny battery packu.
11
Důkladně připájejte z obou stran.
12
Připájení z druhé strany.
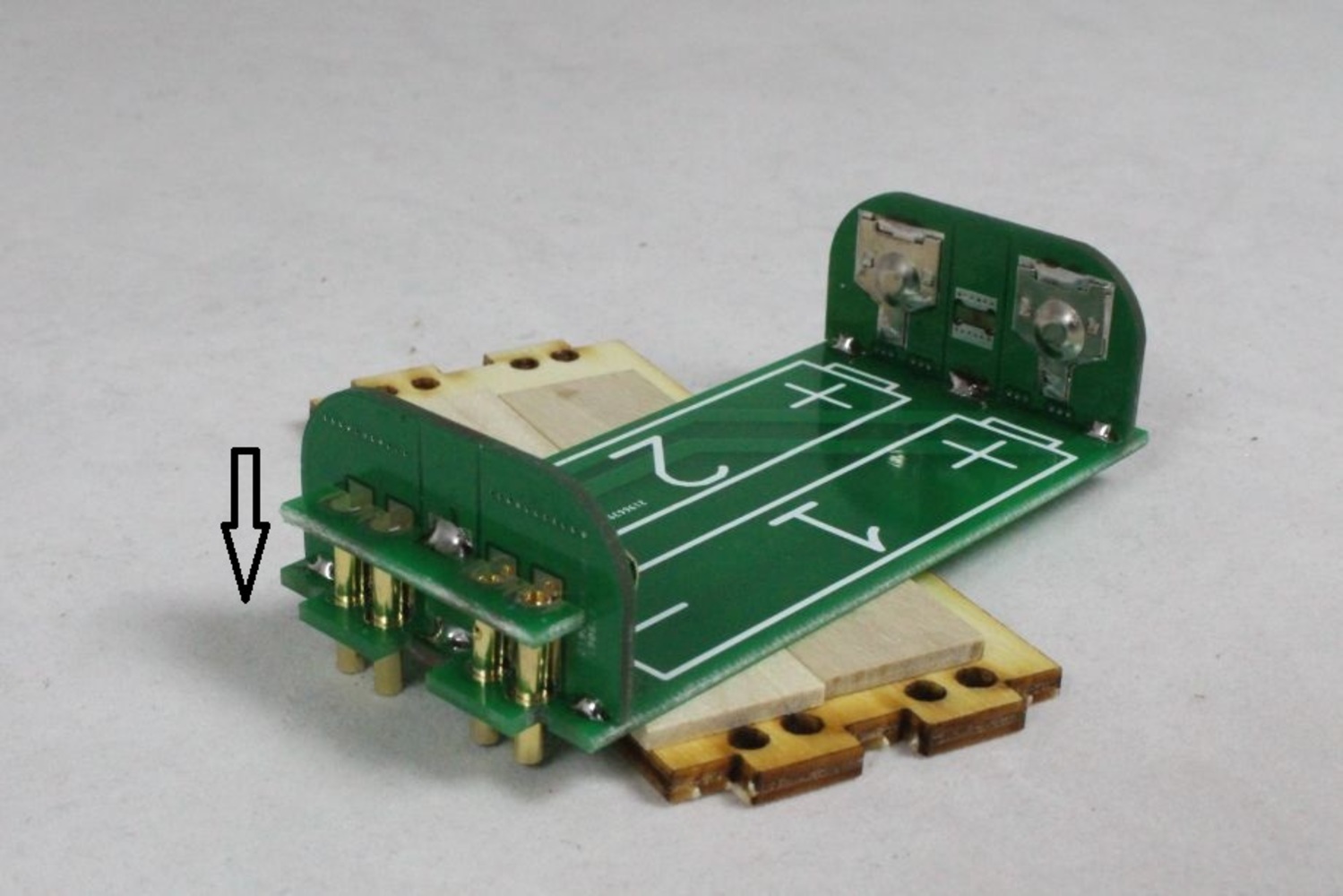
13
U kontaktů je potřeba ohnout plíšky, aby nevyčuhovaly ven podle obrázku.
14
Připájejte kontakty k boční stěně battery packu. Díl je nutné pořádně prohřát, protože plochy jsou velké. Naneste tavidlo a poté přiložte kontakt. Kontakt přidržte pinzetou a přiložte pájku s cínem.
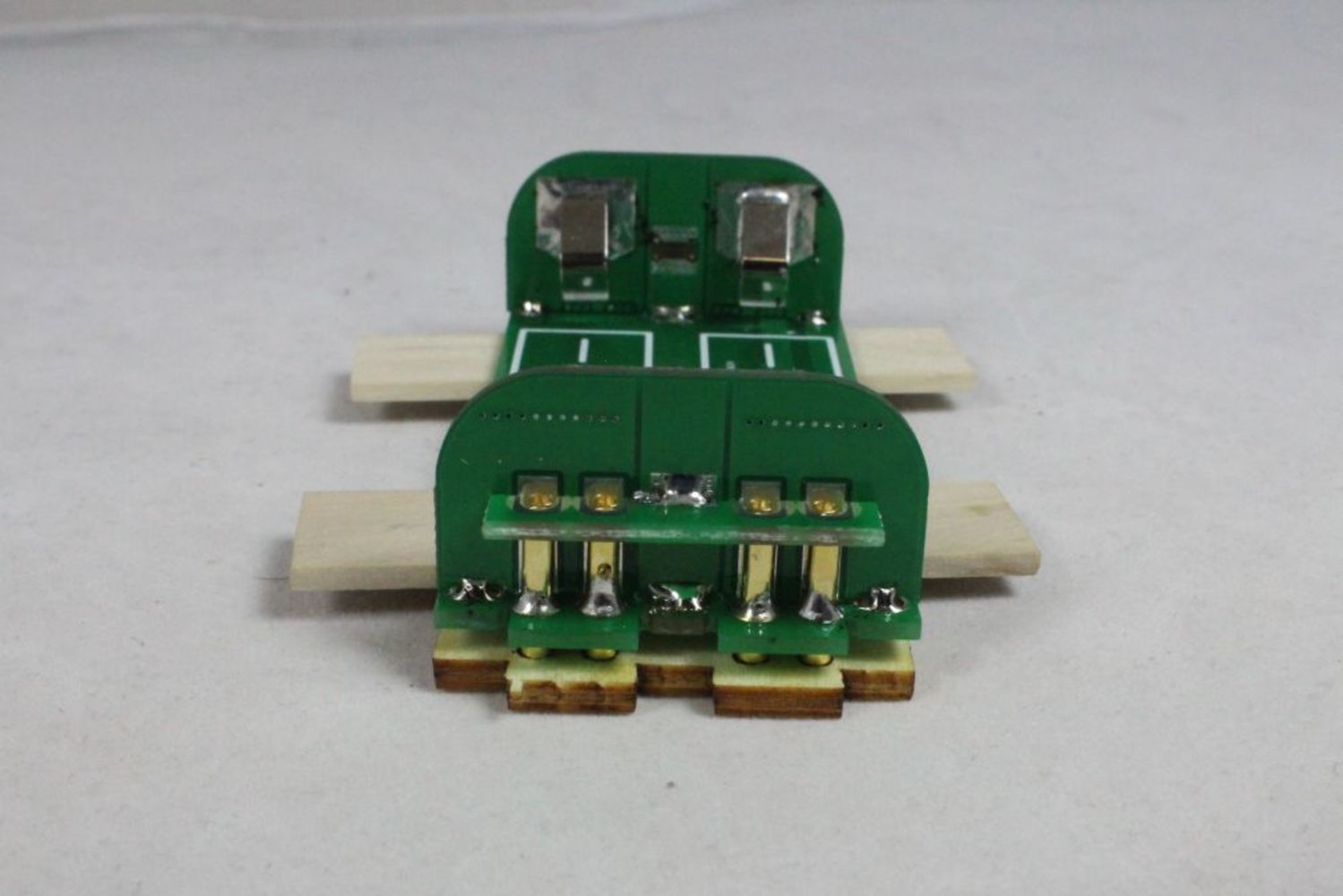
15
Vložte držák pro dutinky do boční stěny battery packu.
16
Druhá strana vloženého držáku pro dutinky do boční stěny battery packu.
17
Držák na dutinky důkladně připájejte z obou stran.
18
Připájení z druhé strany.
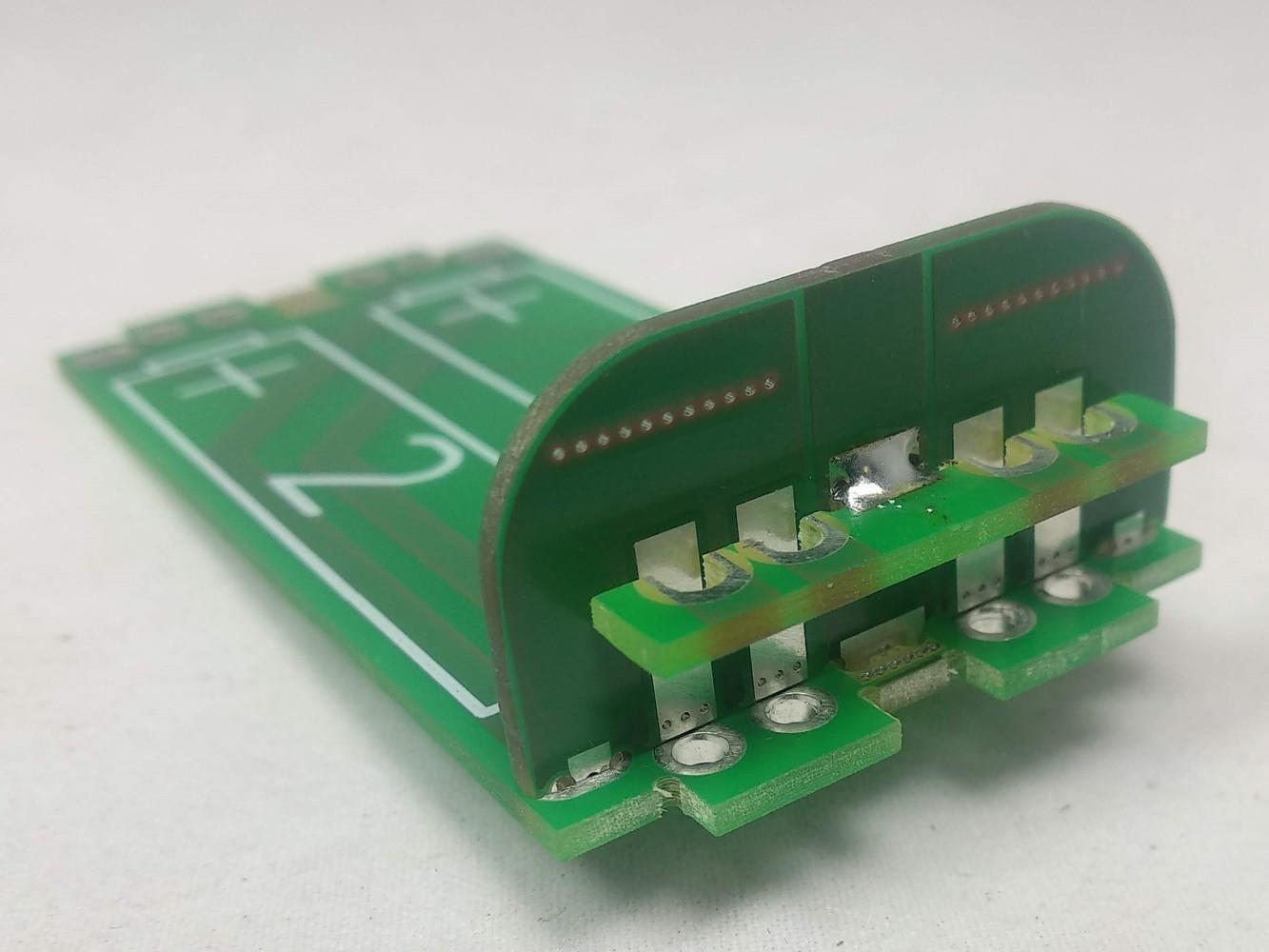
19
Vložte boční stěnu do hlavního panelu dle obrázku. Dodržujte typ kontaktu na baterii v závislosti na vyznačené polaritě na hlavním panelu.
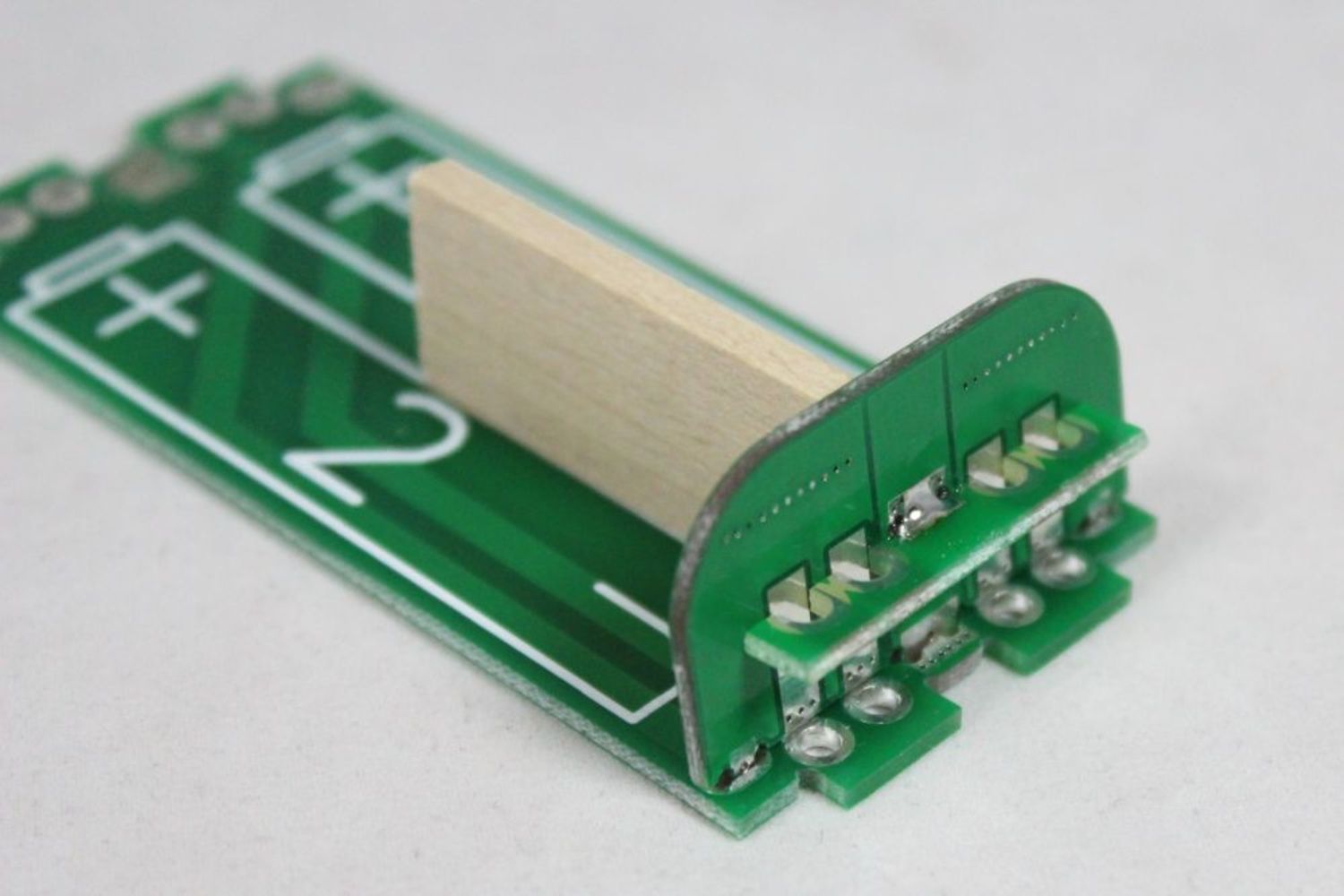
20
Svislost boční stěny zajistěte pomocí kolmého dřívka.
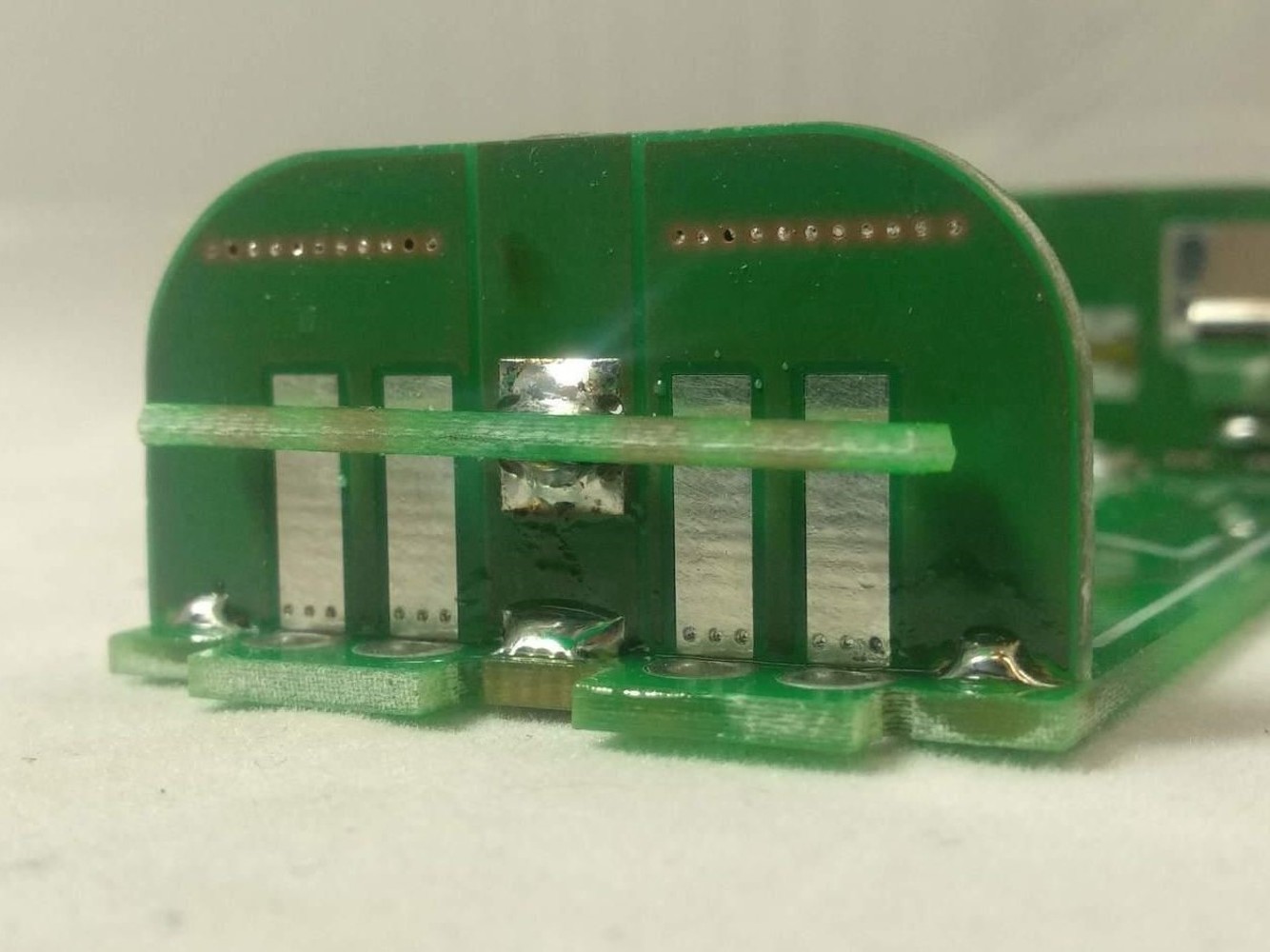
21
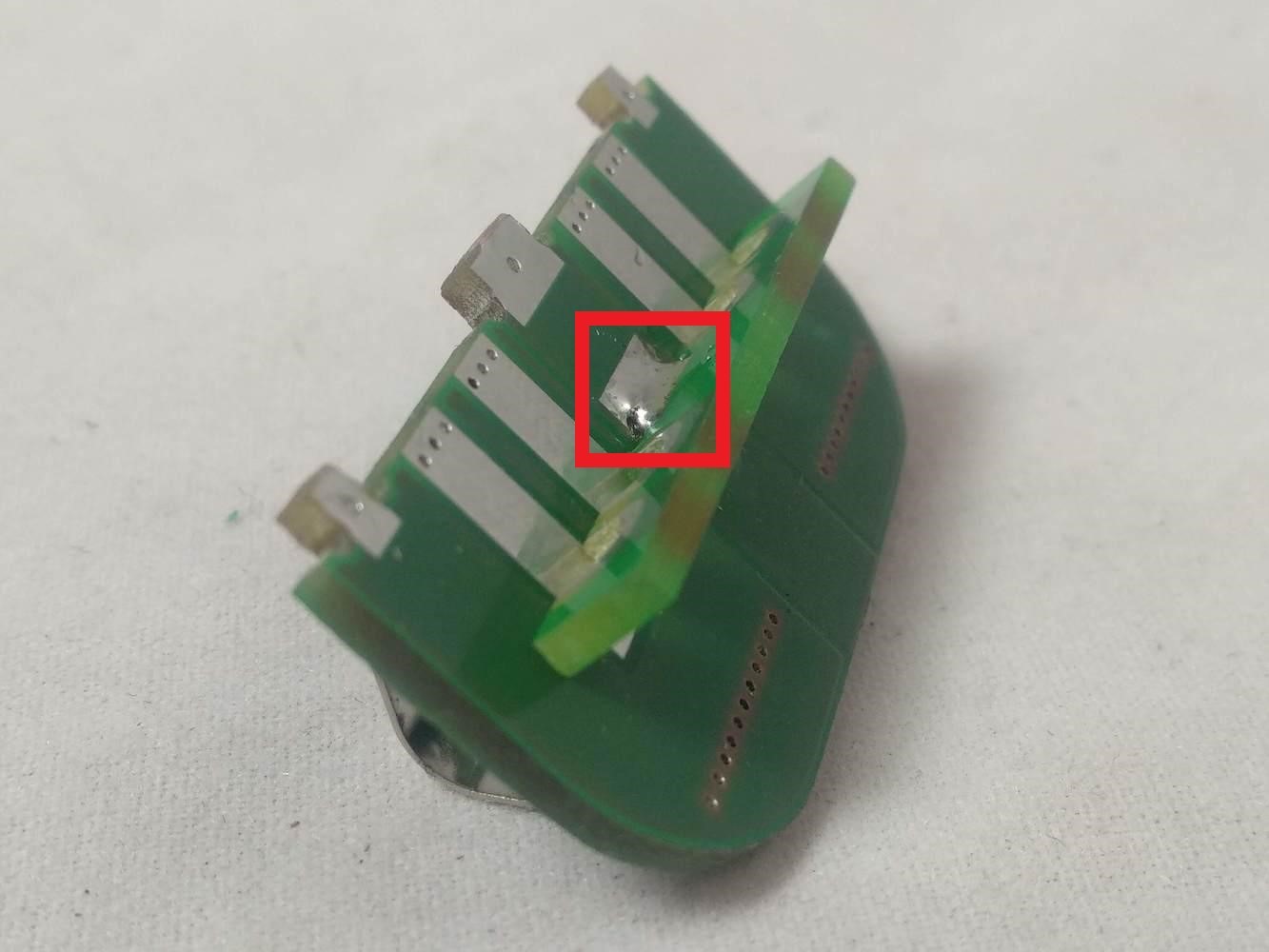
Důkladně zapájejte všechny 3 společné kontakty z obou stran.
22
Druhá strana k zapájení.
23
Vložte druhou boční stěnu do hlavního panelu dle obrázku. Zkontrolujte typ kontaktu na baterii v závislosti na vyznačené polaritě na hlavním panelu. Svislost opět zajistěte kolmým dřívkem. Opět důkladně zapájejte všechny 3 společné kontakty z obou stran.

24
Pod desku vložte překližkový díl battery packu tlustý 3mm a 2 kusy 2mm tenších dřevíček podle obrázku.
25
Vložte dutinky do otvorů dle obrázku. Dávejte pozor, aby hlubší otvory dutinek směřovaly ven z battery packu (dle obrázku dolů). Dutinky musí přesahovat skrz až na podložku podle šipky. Tento krok zopakujte 8x. Ten, kdo tuto větu objevil dostane po nahlášení se u hlavního vedoucího bod.
26
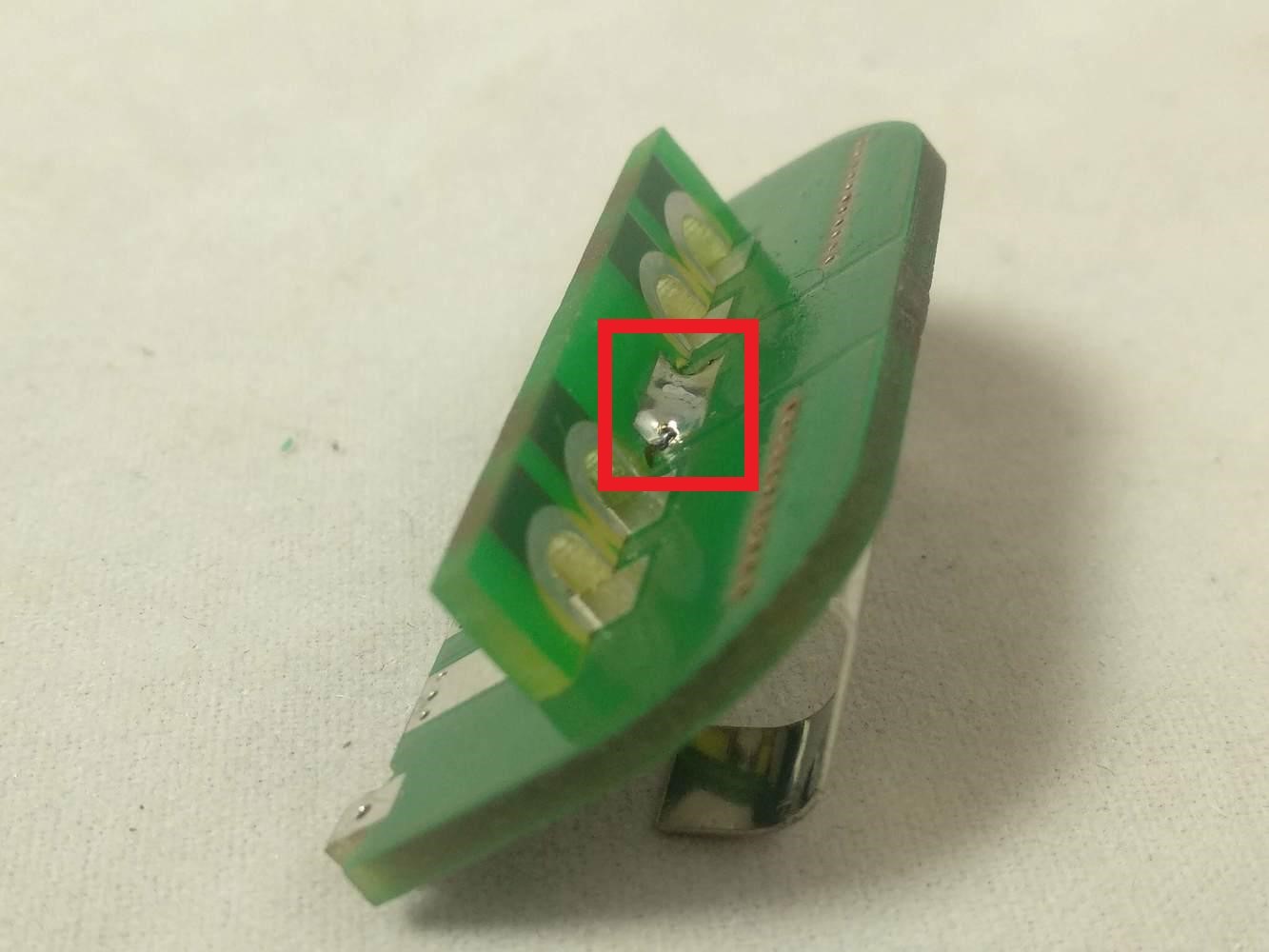
Připájejte dutinky ke spodní desce battery packu podle obrázku.
27
Poté připájejte dutinky i k boční desce na obou stranách battery packu.

28
Nachystejte si spodní překližkový díl battery packu a dvě dřevíčka délky 37mm o tloušťce 3mm.
29
Slepte k sobě díly podle obrázku.
30
Vezměte si svůj battery pack a položte si jej před sebe dle obrázku.
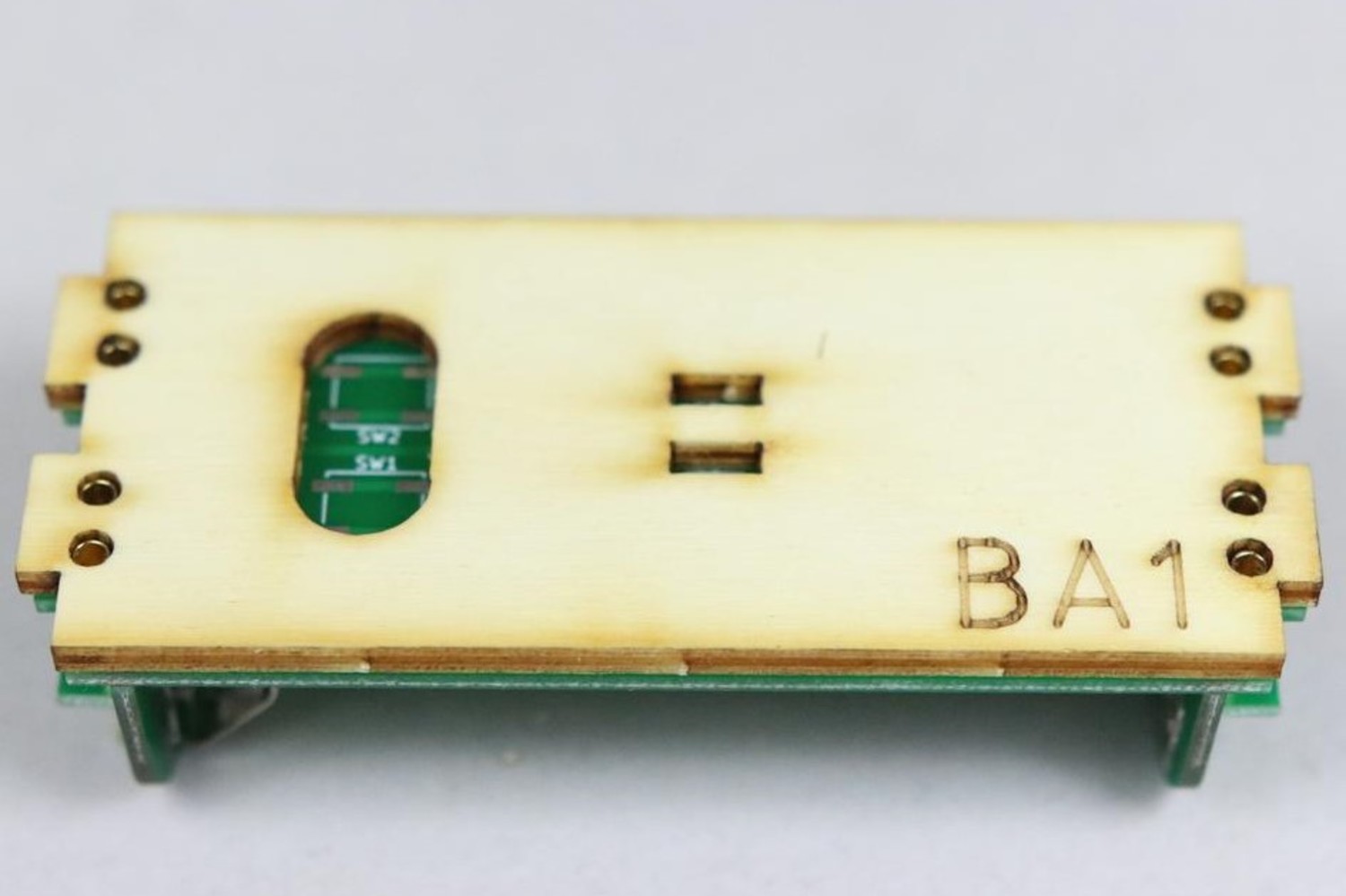
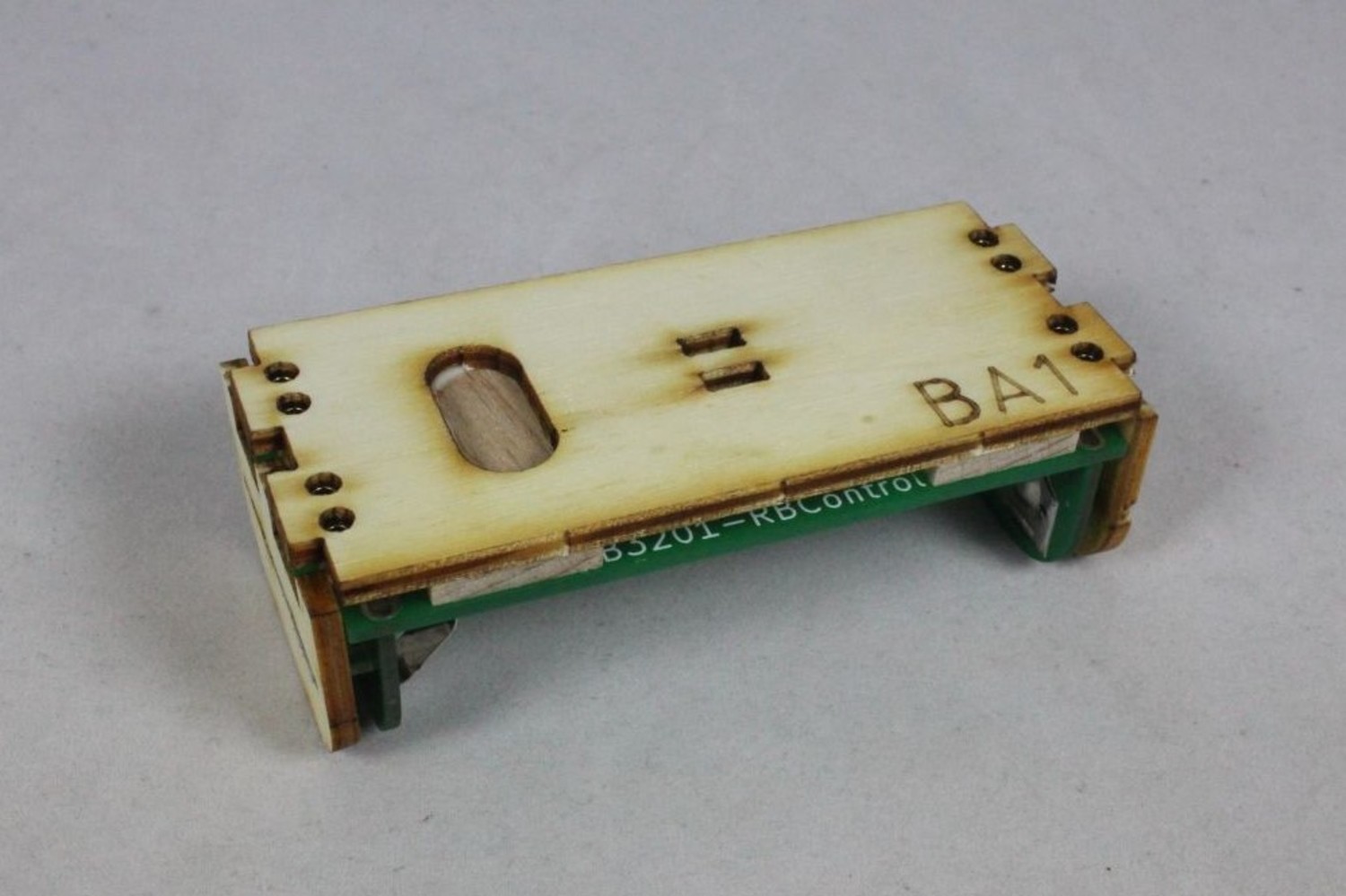
31
Na battery pack nasuňte dřevěný díl BA1 dle obrázku přilepenými dřevíčky dolů. Na orientaci jinak nezáleží.

32
Desku si otočte a nachystejte si díly BA2.

33
Přilepte díly BA2 z obou stran battery packu.

34
Výsledná podoba dřevěného obložení.
35
Znovu si otočte battery pack dílem BA1 nahoru.
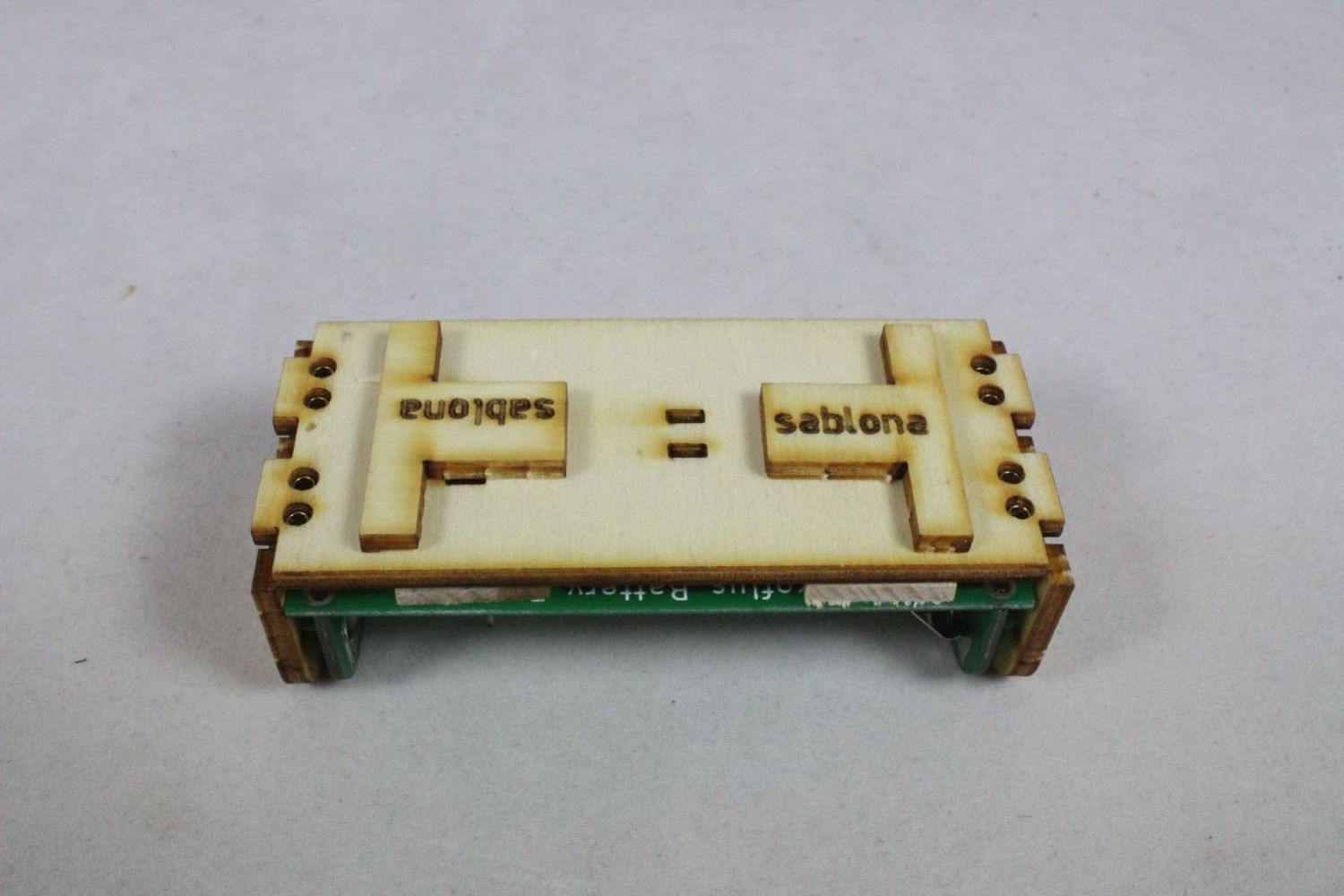
36
Na díl BA1 položte díly “sablona” dle obrázku. (slouží pouze jako podložka, nelepit!).
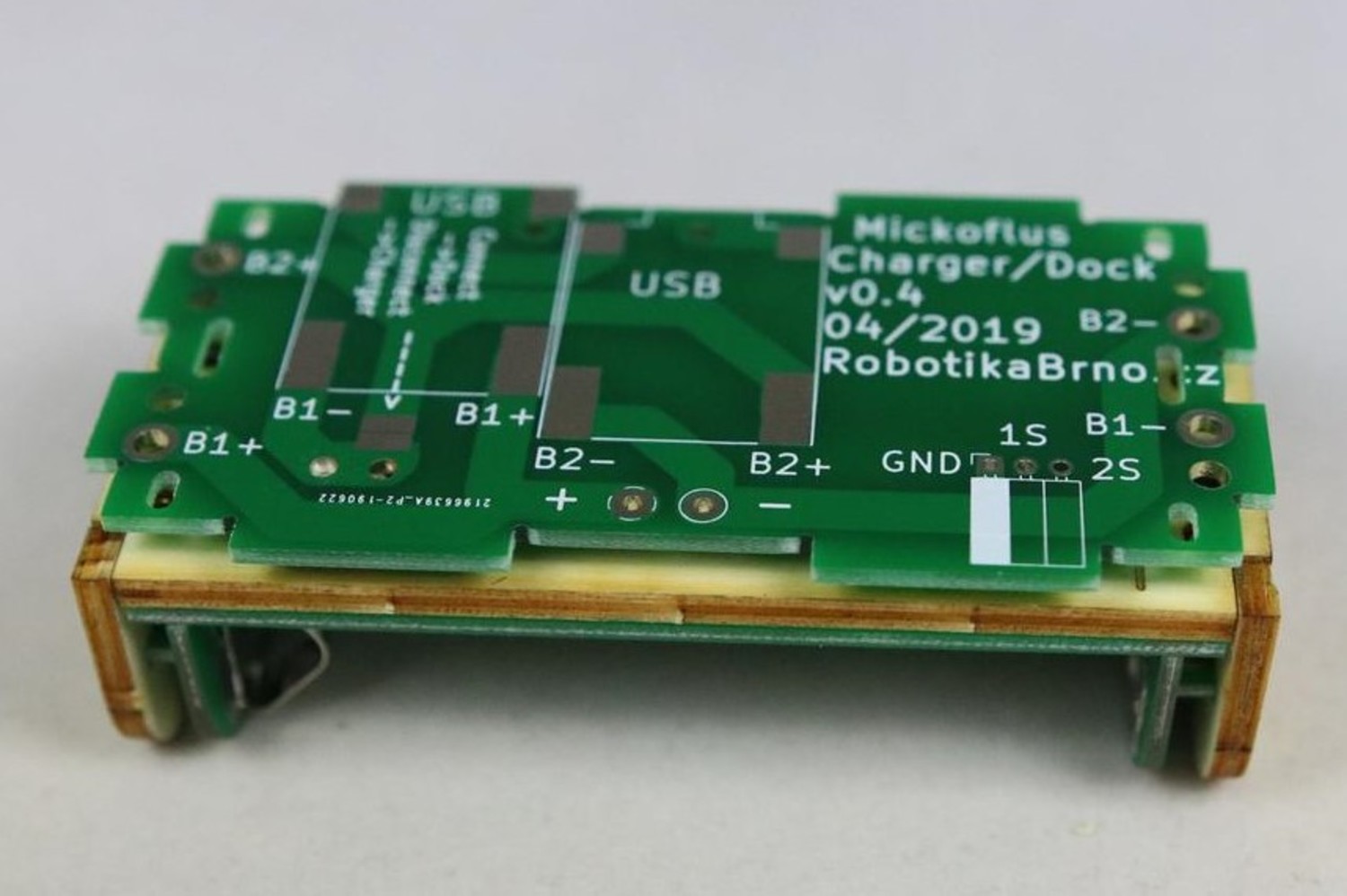
37
Na podložky vložte nabíjecí desku.

38
Vezměte si 4 banánky.
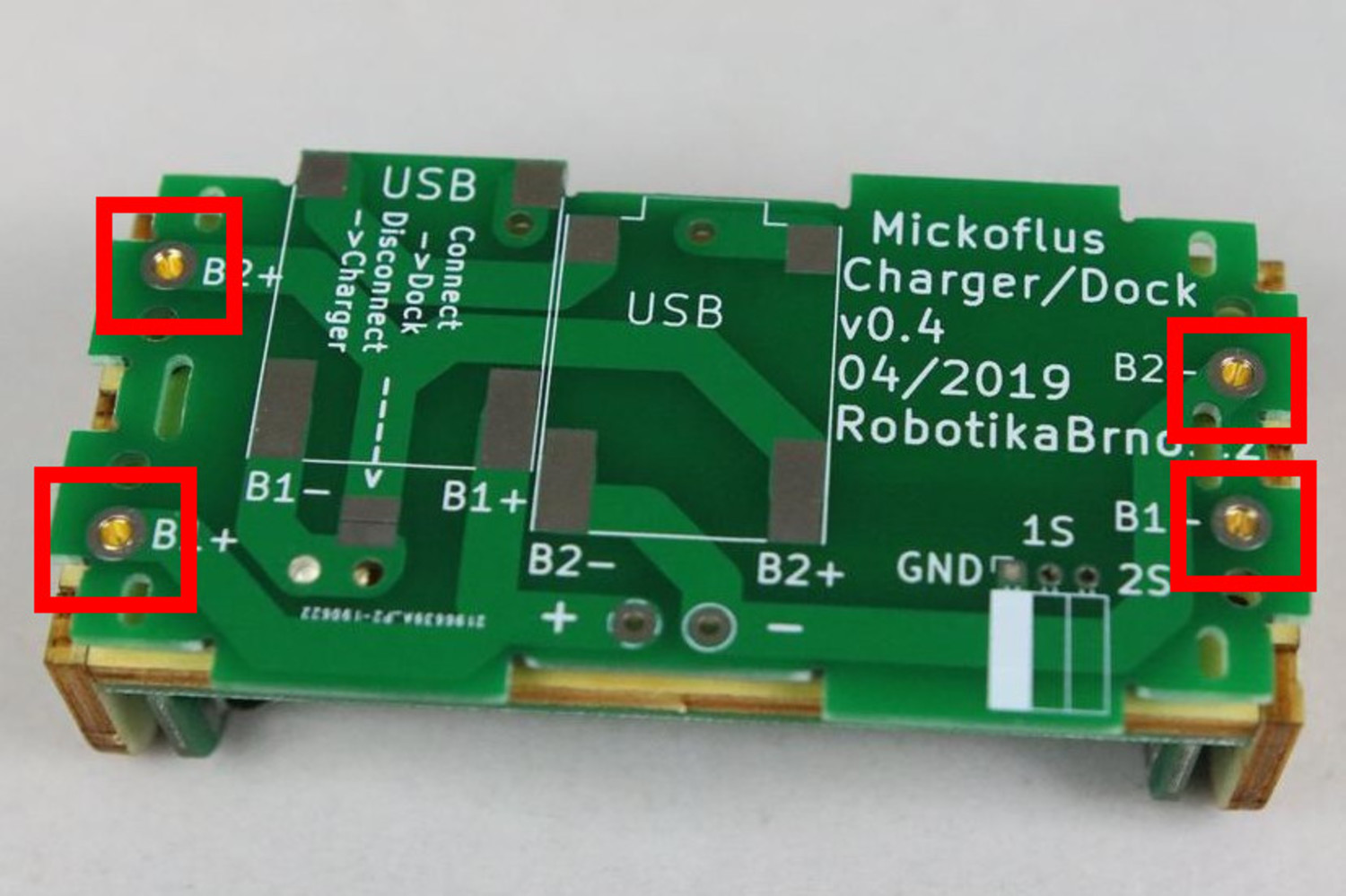
39
Zasuňte banánky do dutinek dle obrázku. Banánek nesmí přesahovat a zároveň se nesmí propadnout.

40
Banánky připájejte k desce. Nevadí, když se díra zalije cínem.
41
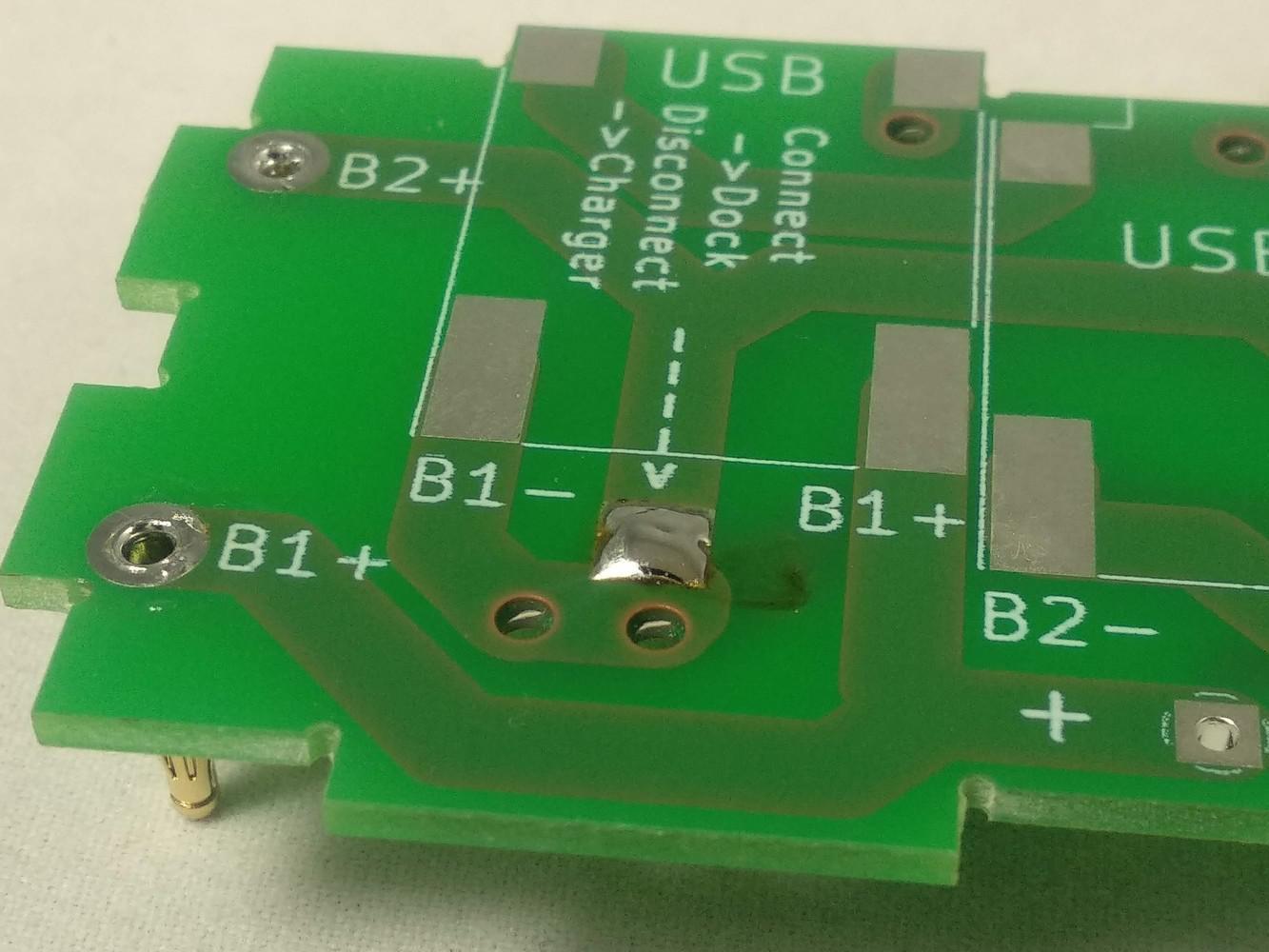
U jedné z desek zkratujte propojku dle obrázku a tím z ní vyrobíte dokovací desku do robota.
42
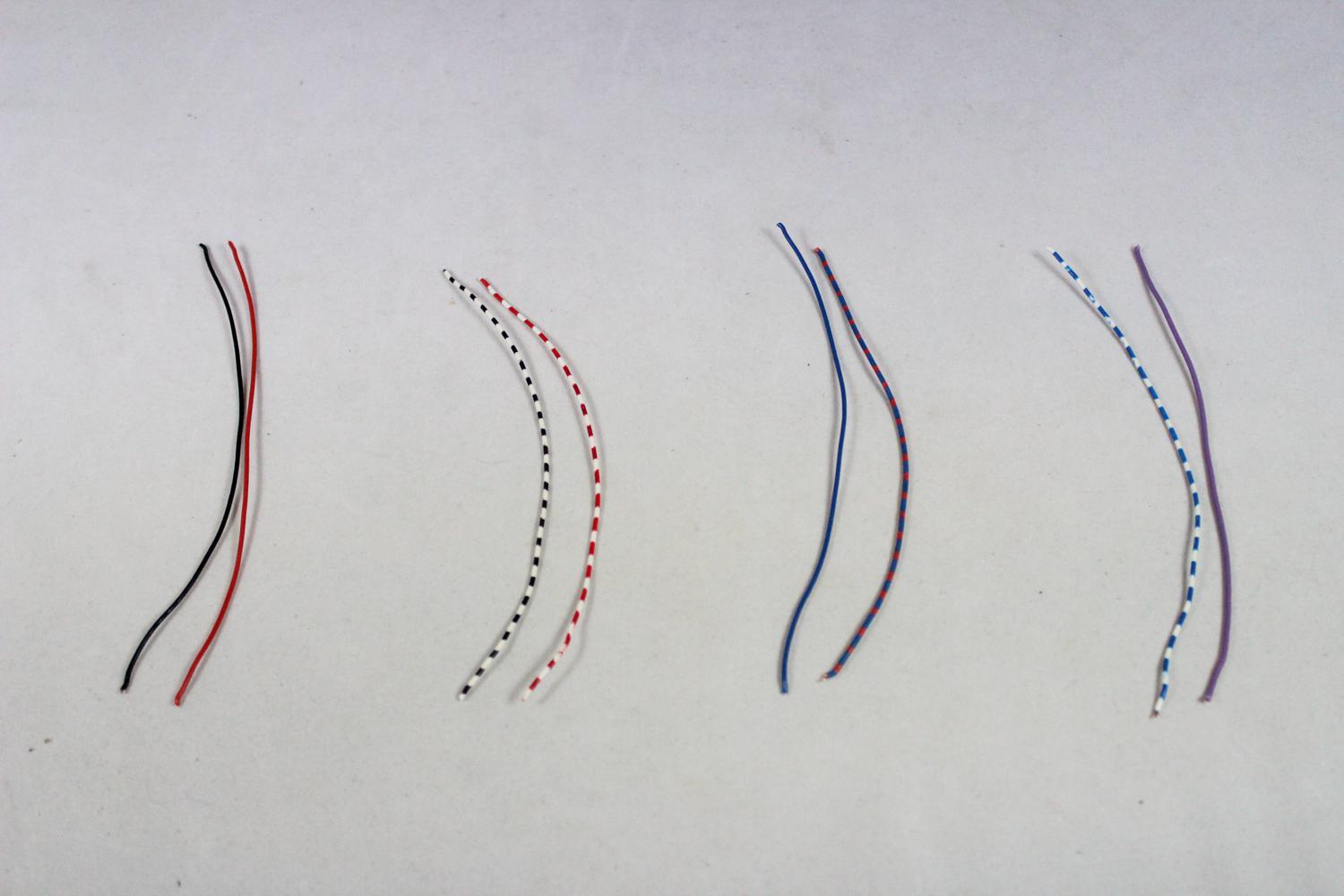
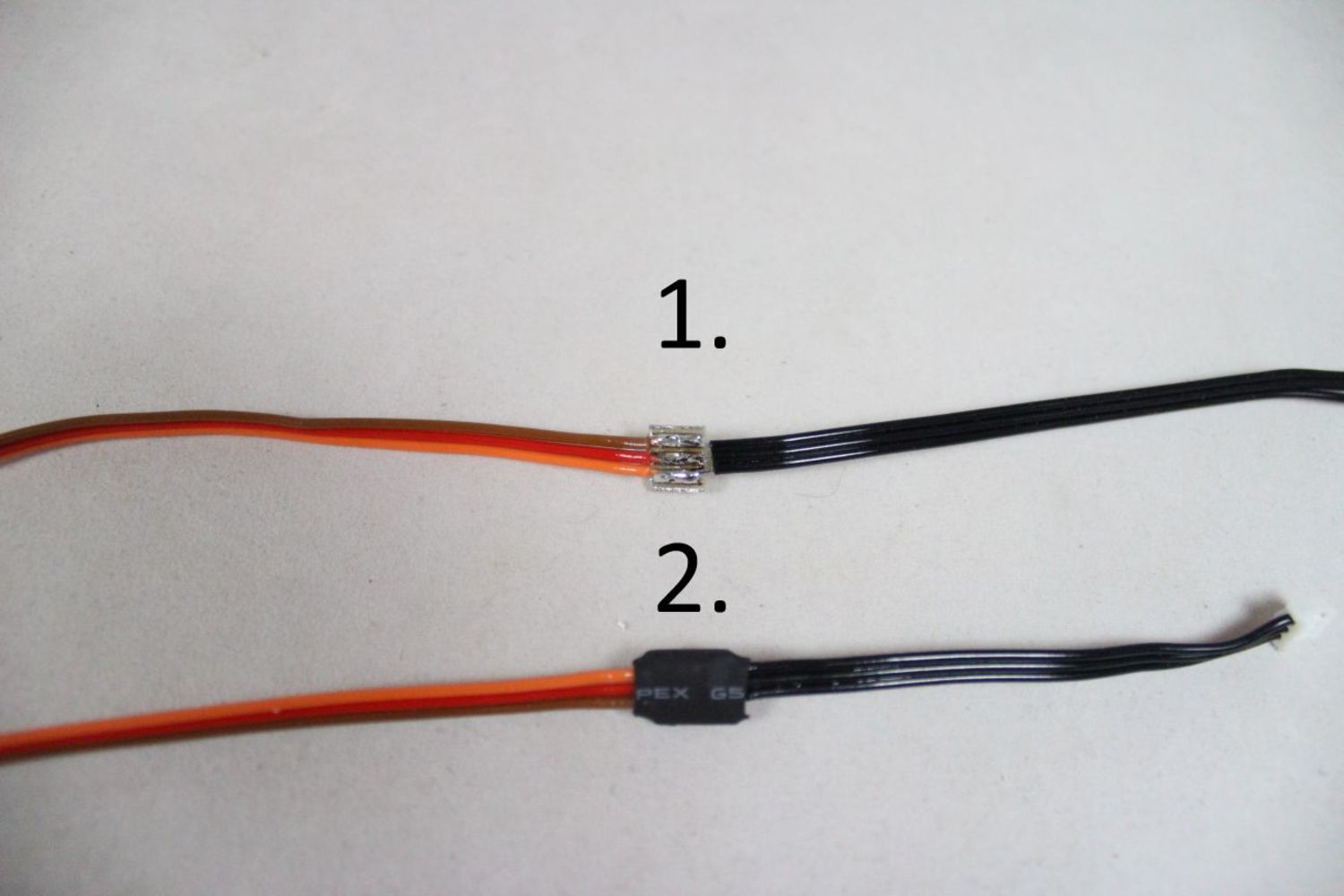
Nachystejte si dva kabely. Doporučené barevné kombinace jsou znázorněný na fotce.
43
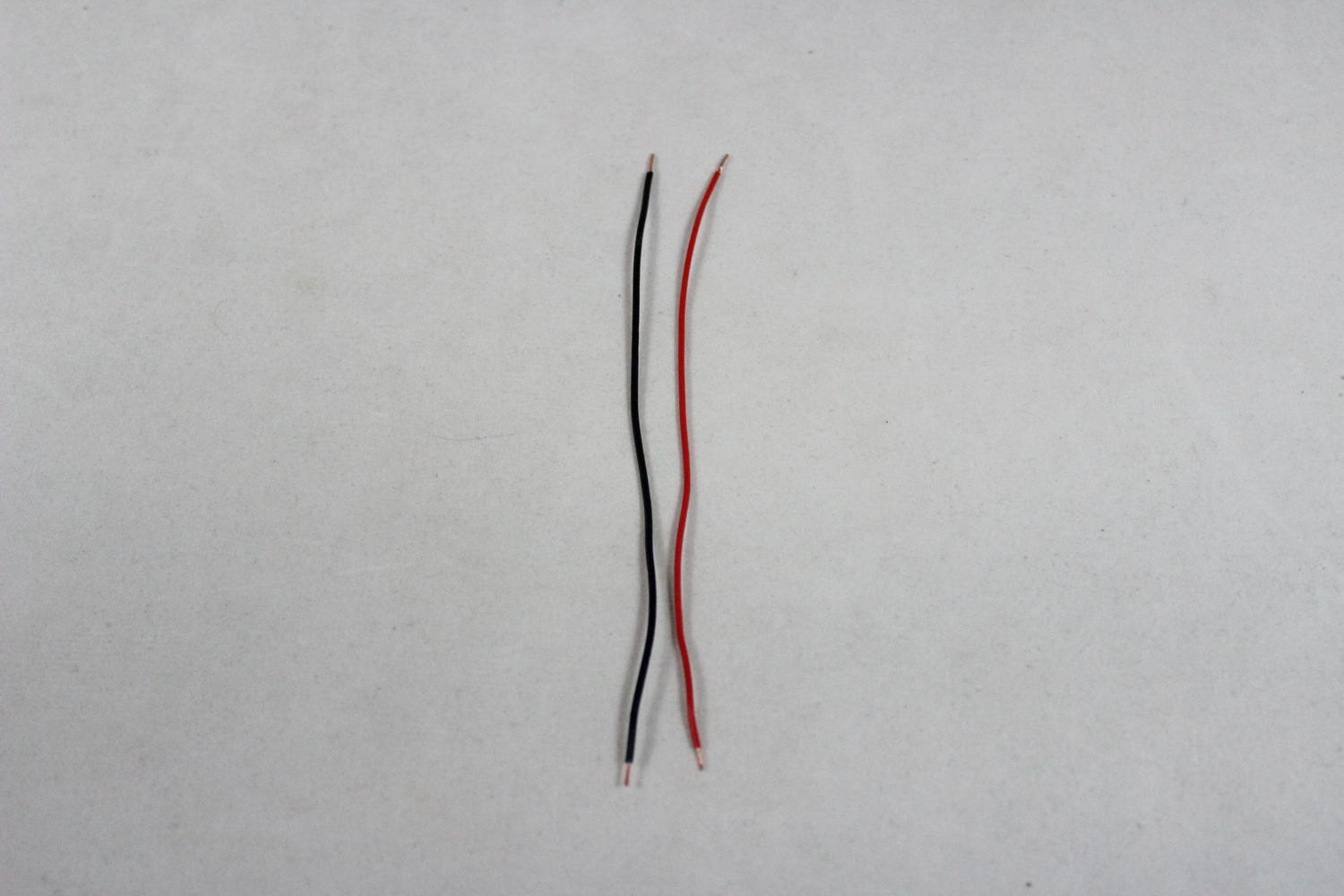
Na jedné straně kabel odizolujte 3 mm a na druhé straně 6 mm.
44
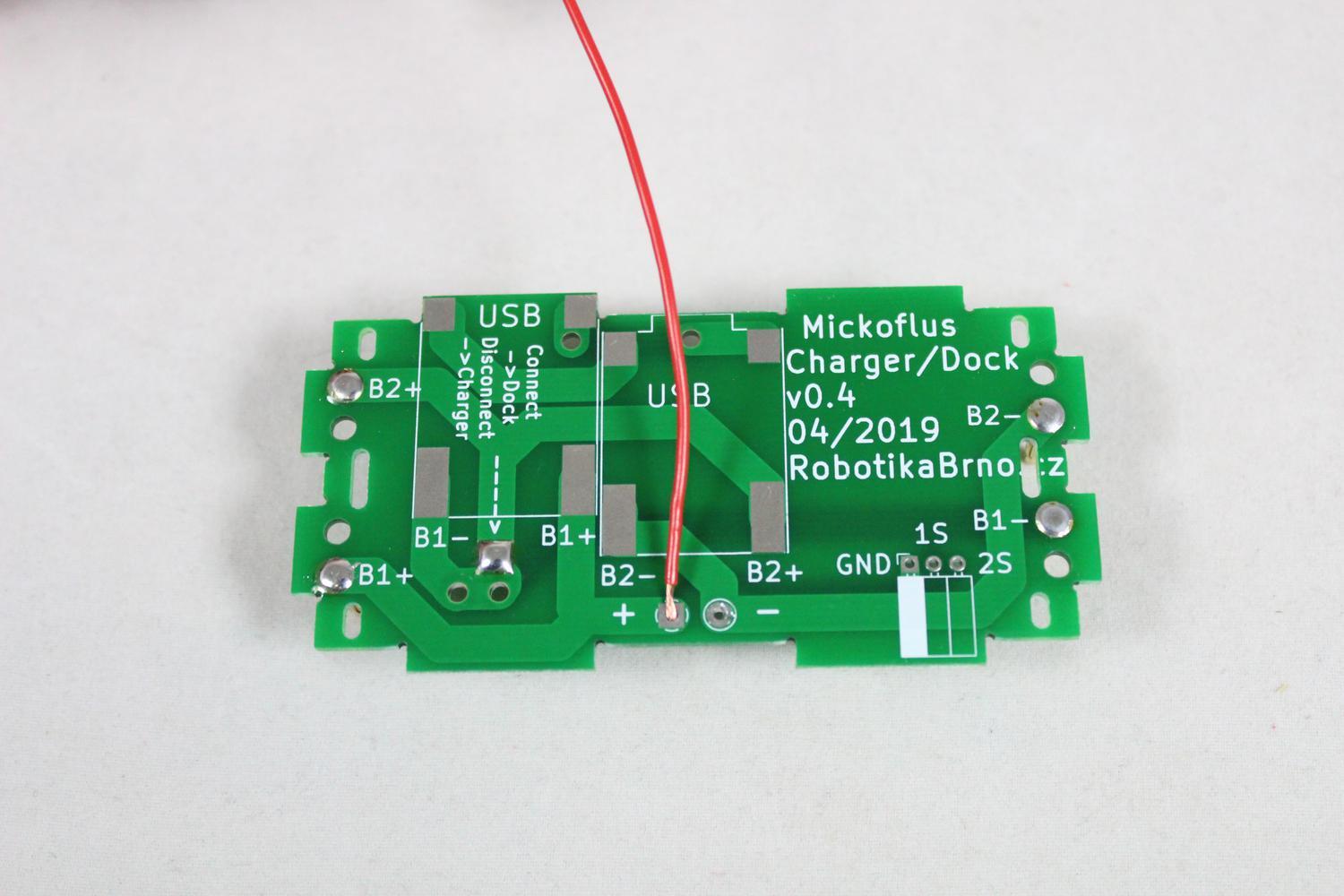
Kabely připájejte na dokovací desku kratší odizolovanou stranou tak, jak je znázorněno na fotce. Kabely musí směřovat k popisku USB.
45
Výsledná podoba dokovací desky pro battery pack do robota.

46
Ke druhé desce napájejte nabíjecí moduly dle obrázku.
47
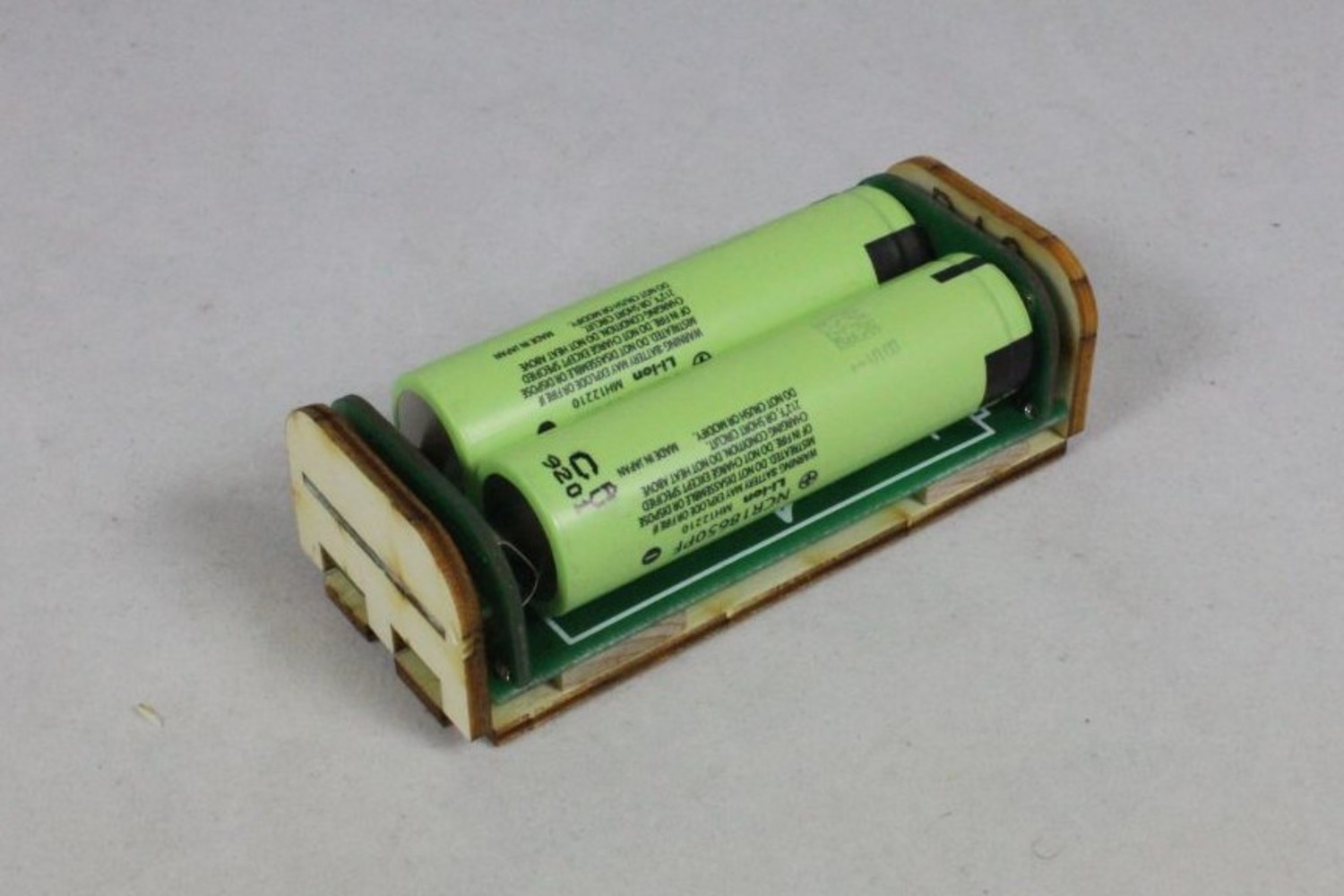
Odpojte oba nabíjecí moduly. Vložte do pouzdra baterie. POZOR na polaritu.
48
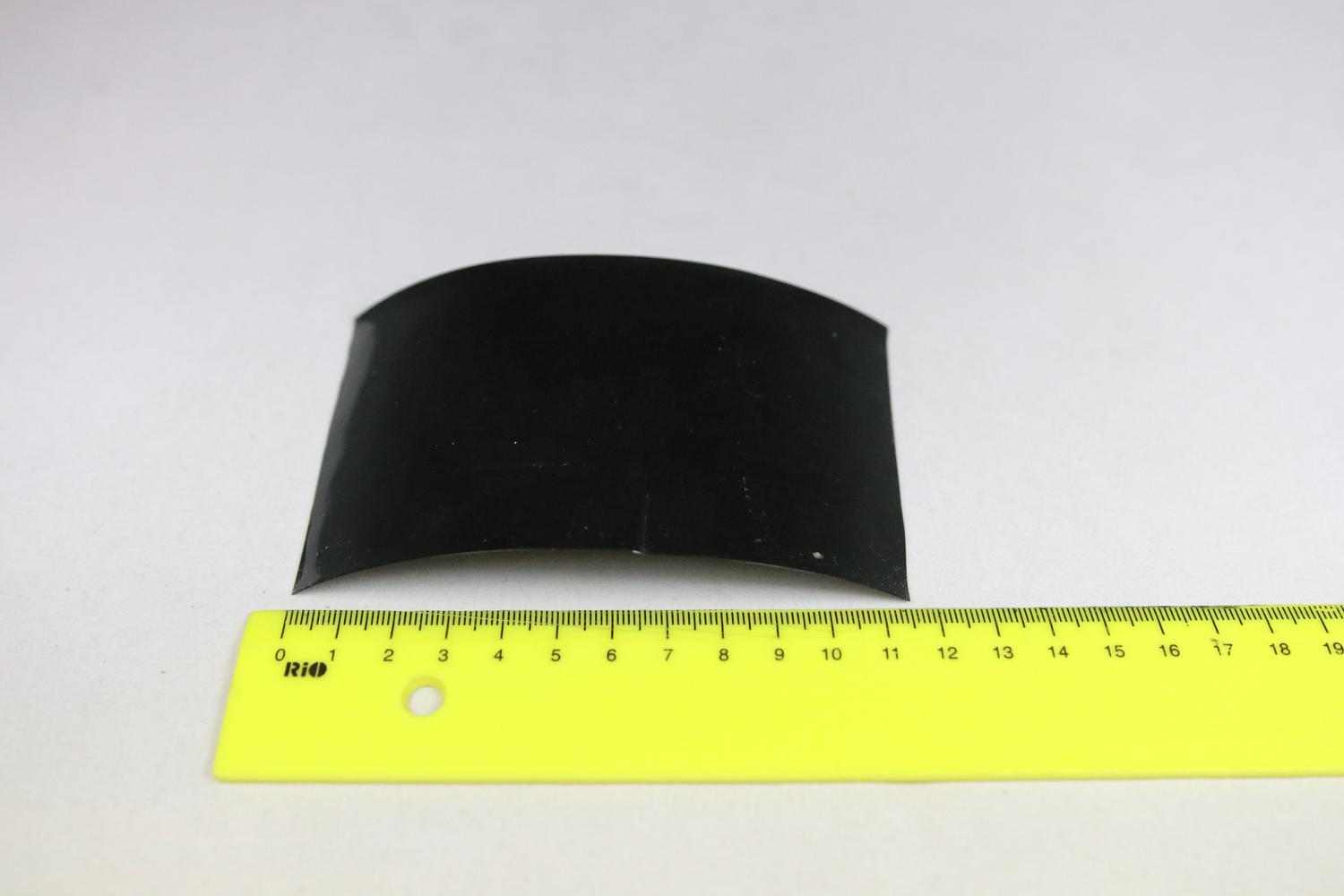
Ustřihněte si 12 cm smršťovací folie.

49
Vložte celý battery pack do smršťovací folie.

50
Horkovzdušnou pistolí zatáhněte celý battery pack do podoby jako je na obrázku. Horkovzdušnou pistoli nastavte na 150 °C. Konce nahřejte a zamáčkněte tělem battery packu o pracovní podložku.

51
Battery pack otočte a křížovým šroubovákem udělejte do fólie díry v místech, kde jsou dutinky.

52
Ustřihněte si 15 cm popruhu.

53
Popruh přilepte ke stranám battery packu tavnou pistolí podle obrázku.

54
Výsledný battery pack.

55
Dok battery packu vložte do podvozku robota jako na fotce.

56
Spodní část doku zacvakněte do výřezů na spodní straně robota.

57
Nakonec připojte kabely do svorkovnice IN.
UIBoard
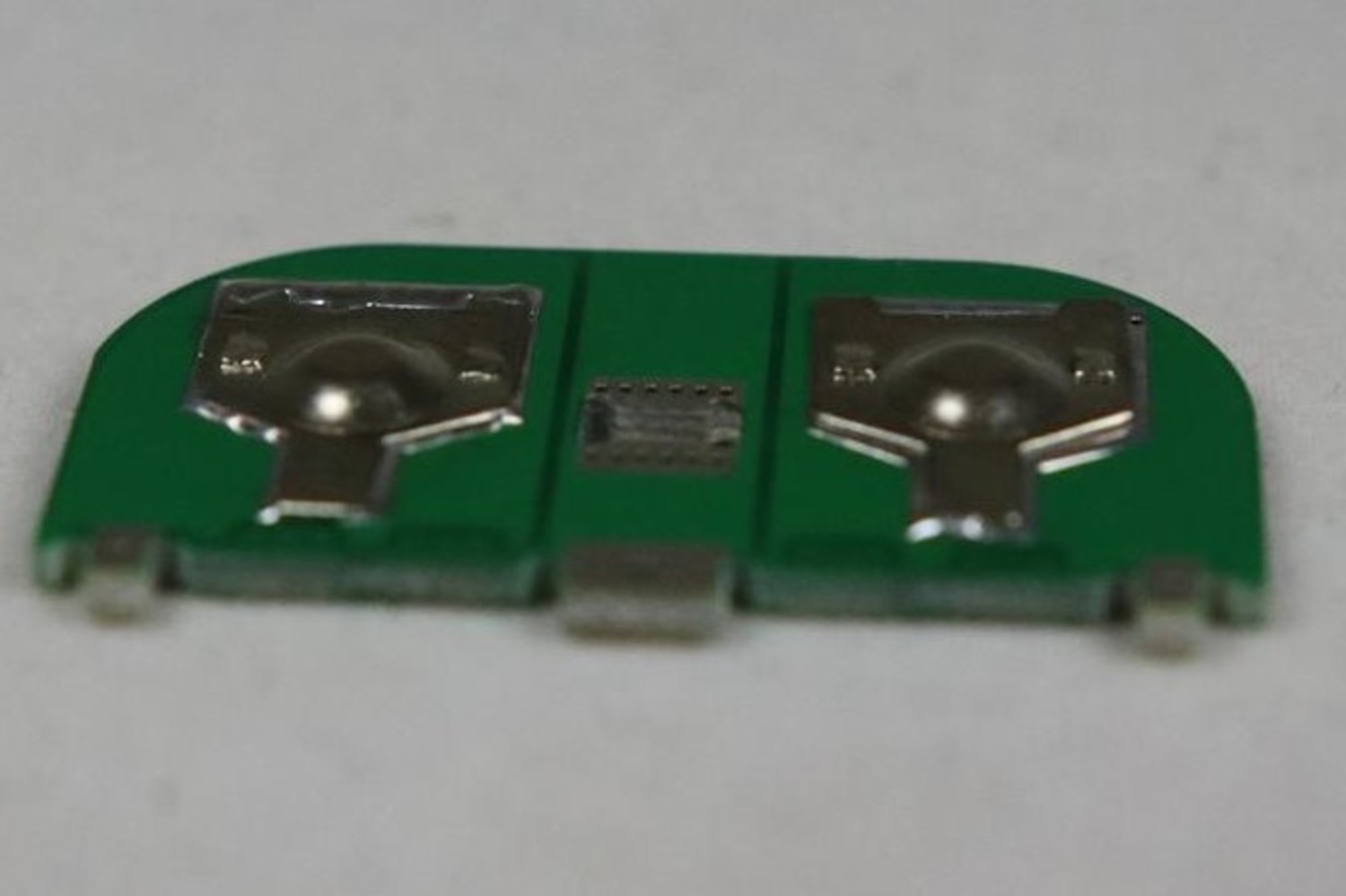
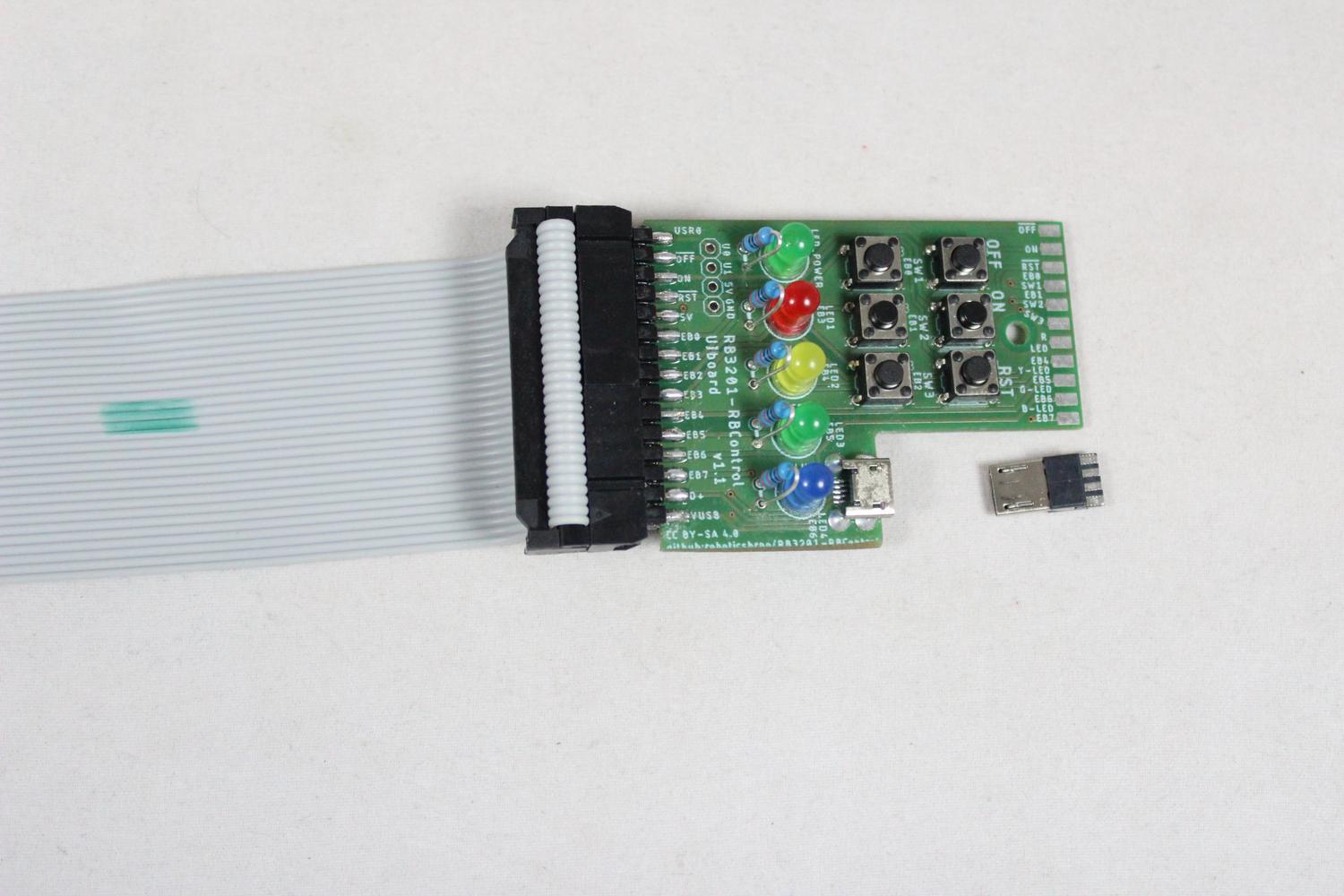
1
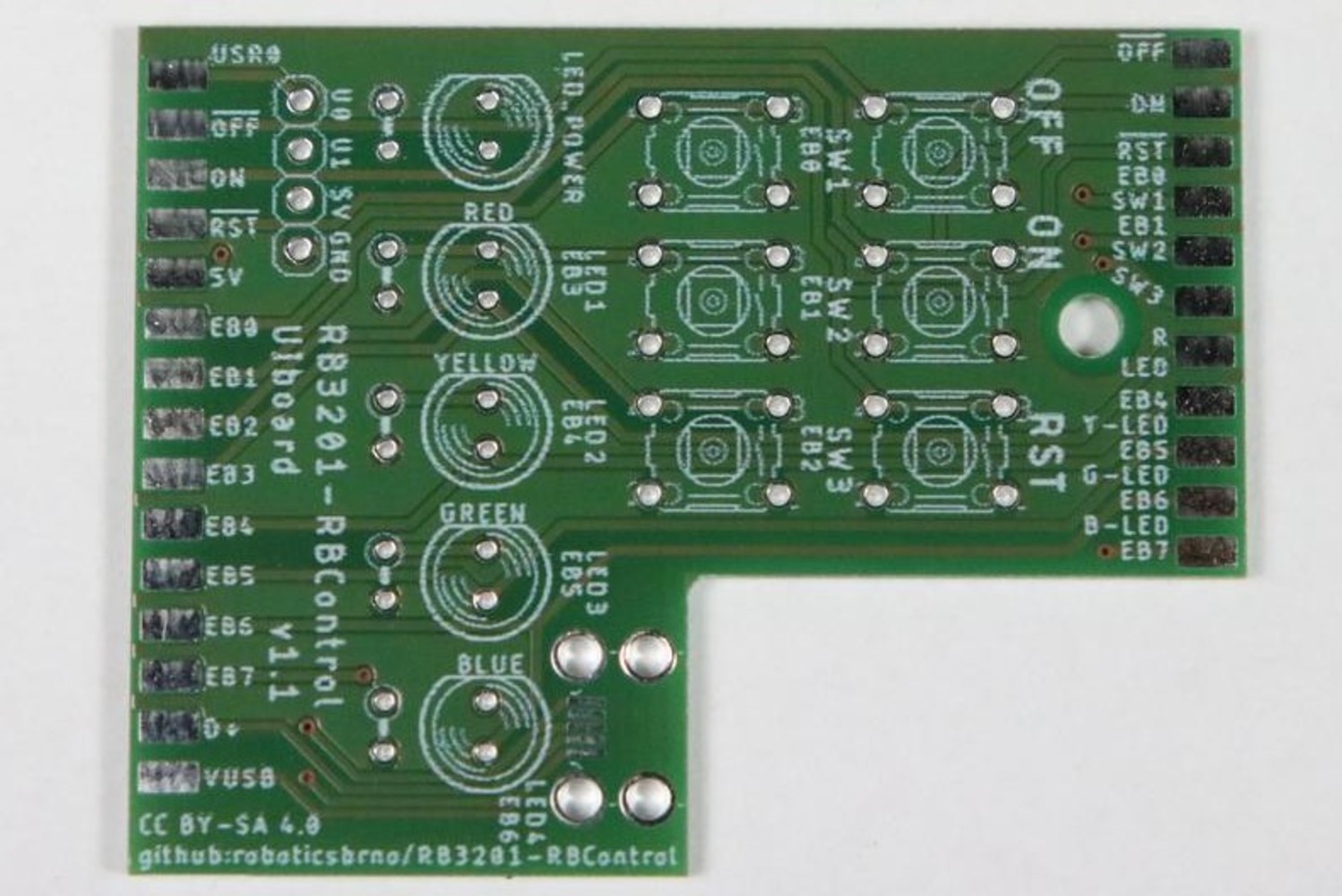
Horní strana desky. Součástky se budou pájet pouze na tuto horní stranu.
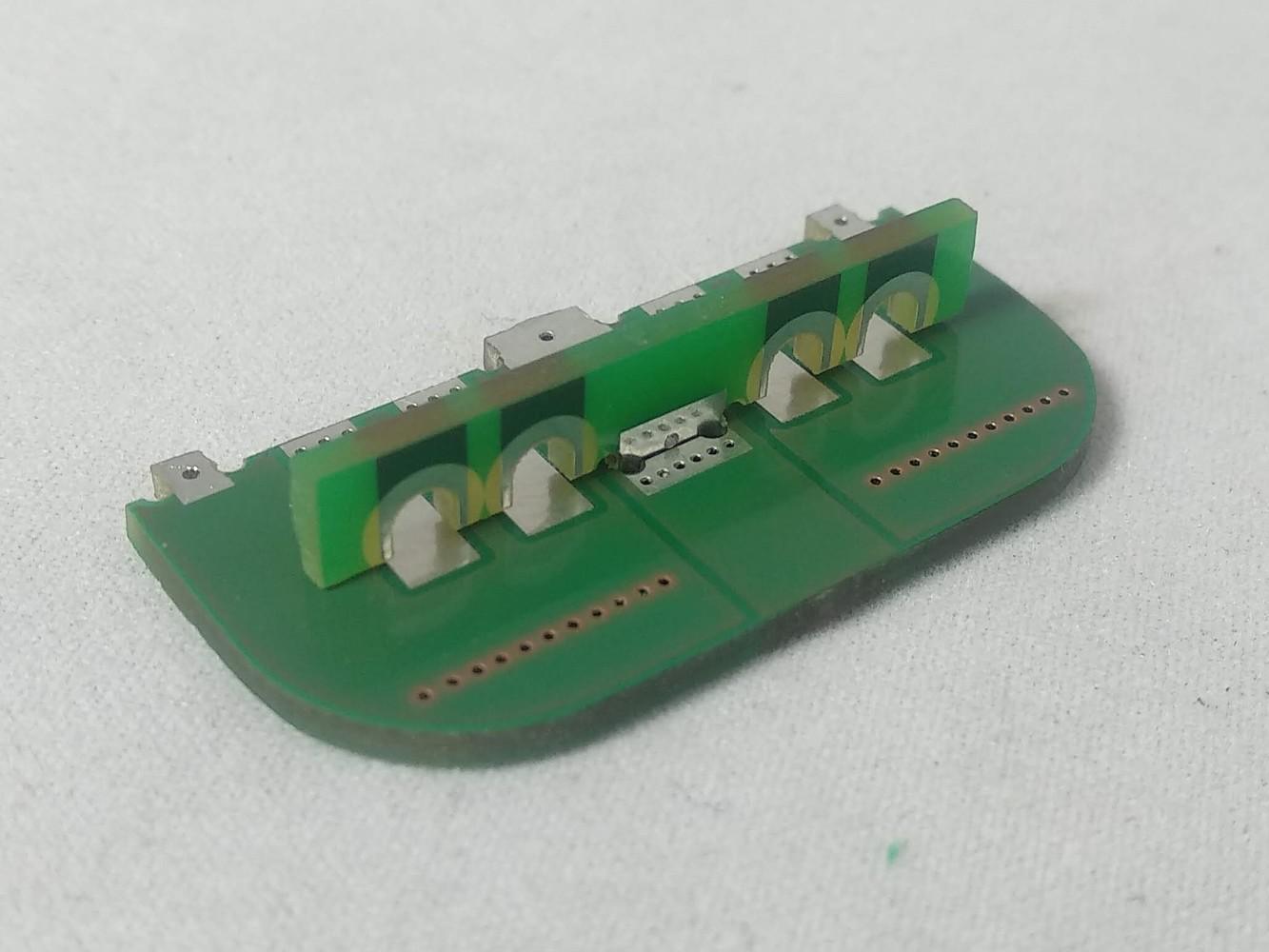
2
Zadní strana desky.

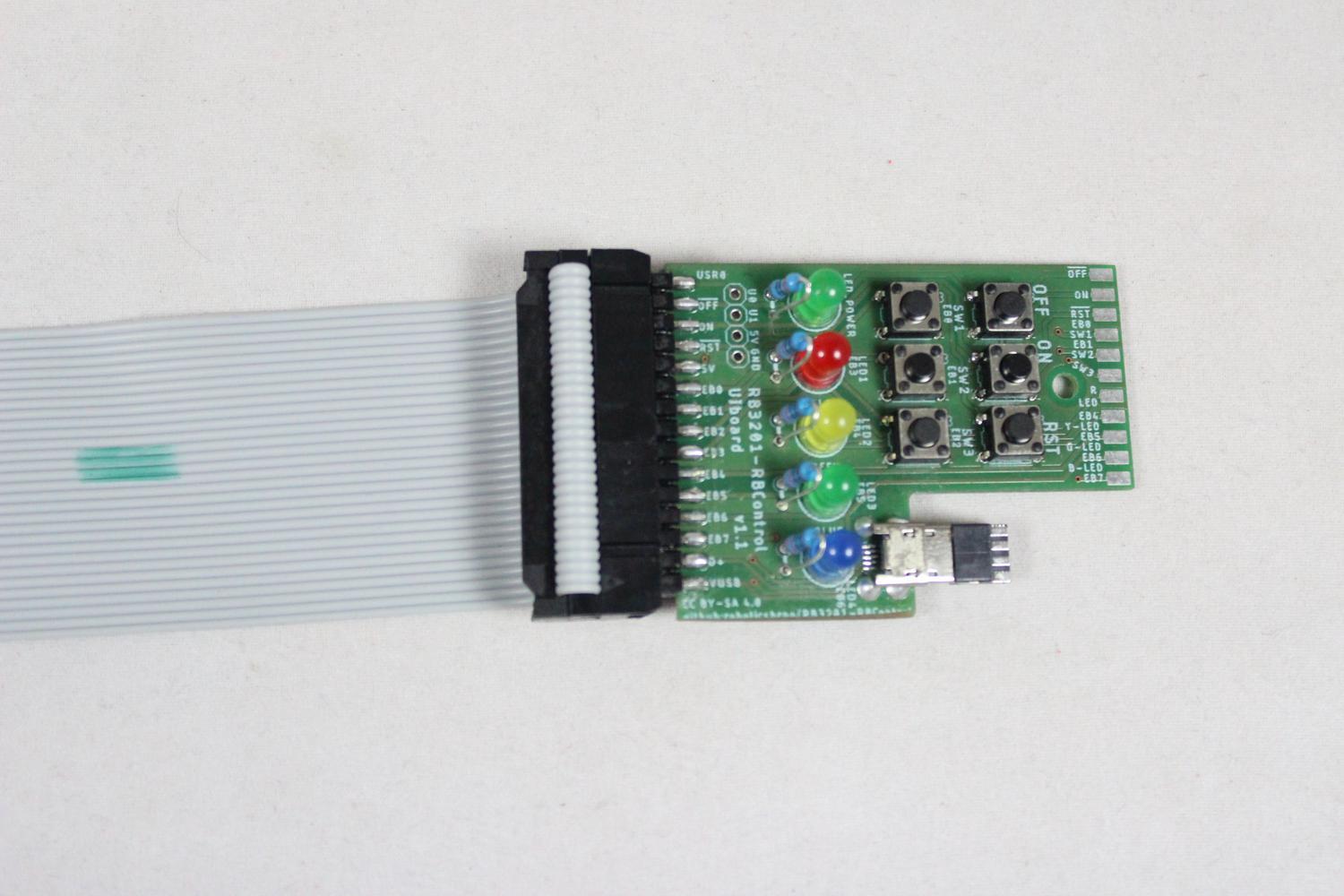
3
Dostatečně osazená deska pro fungování Roboruky.
4
Osadíme 6 tlačítek.

5
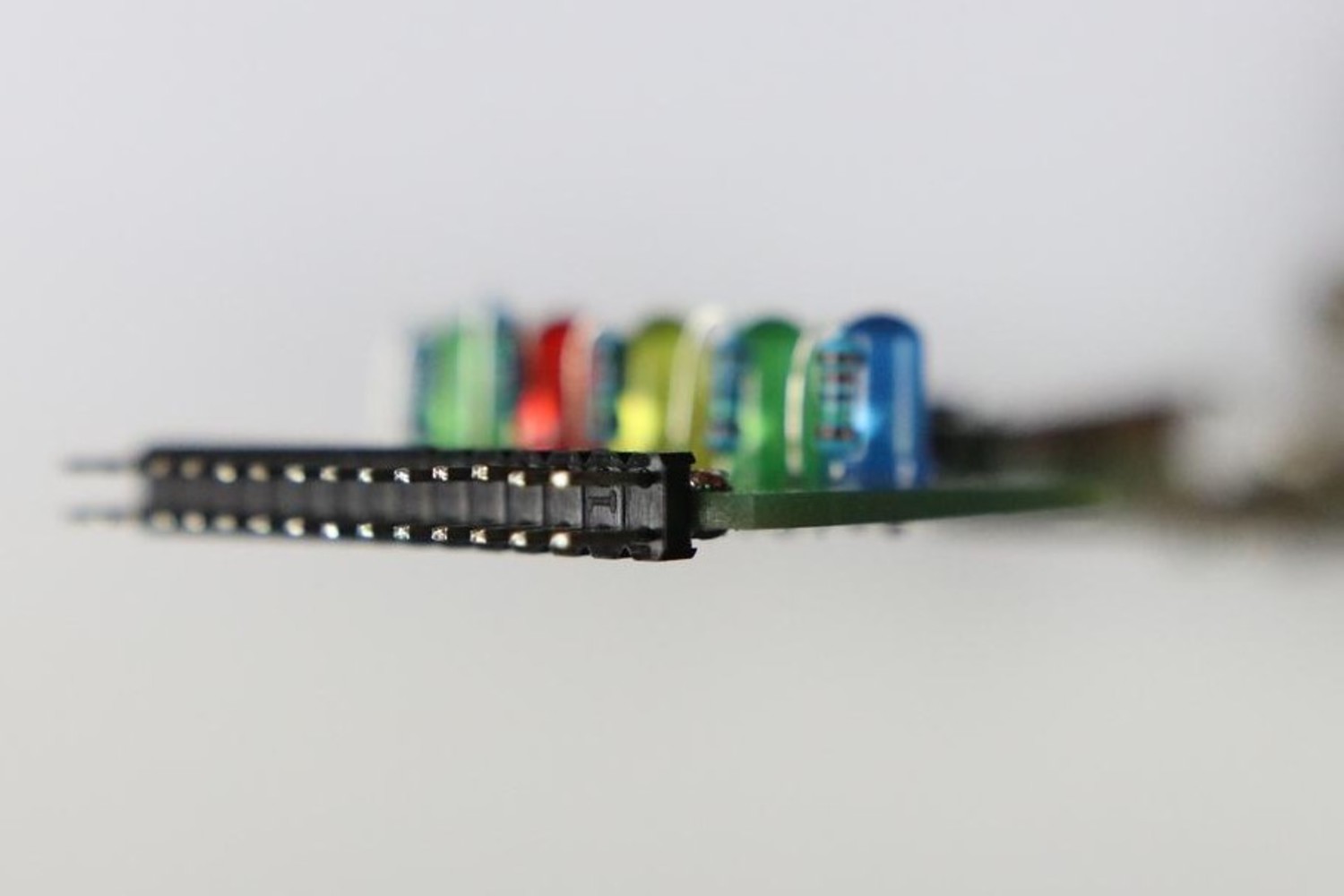
Osadíme svíticí diody. Zploštělá strana diod musí souhlasit se zploštěním nakresleným na desce. Krajní zelená dioda bude svítit vždy, když bude Roboruka zapnutá.

6
K diodám osadíme ochranná odpory. Velikost odporu je 1,5 kOhm. Na polaritě nezáleží.
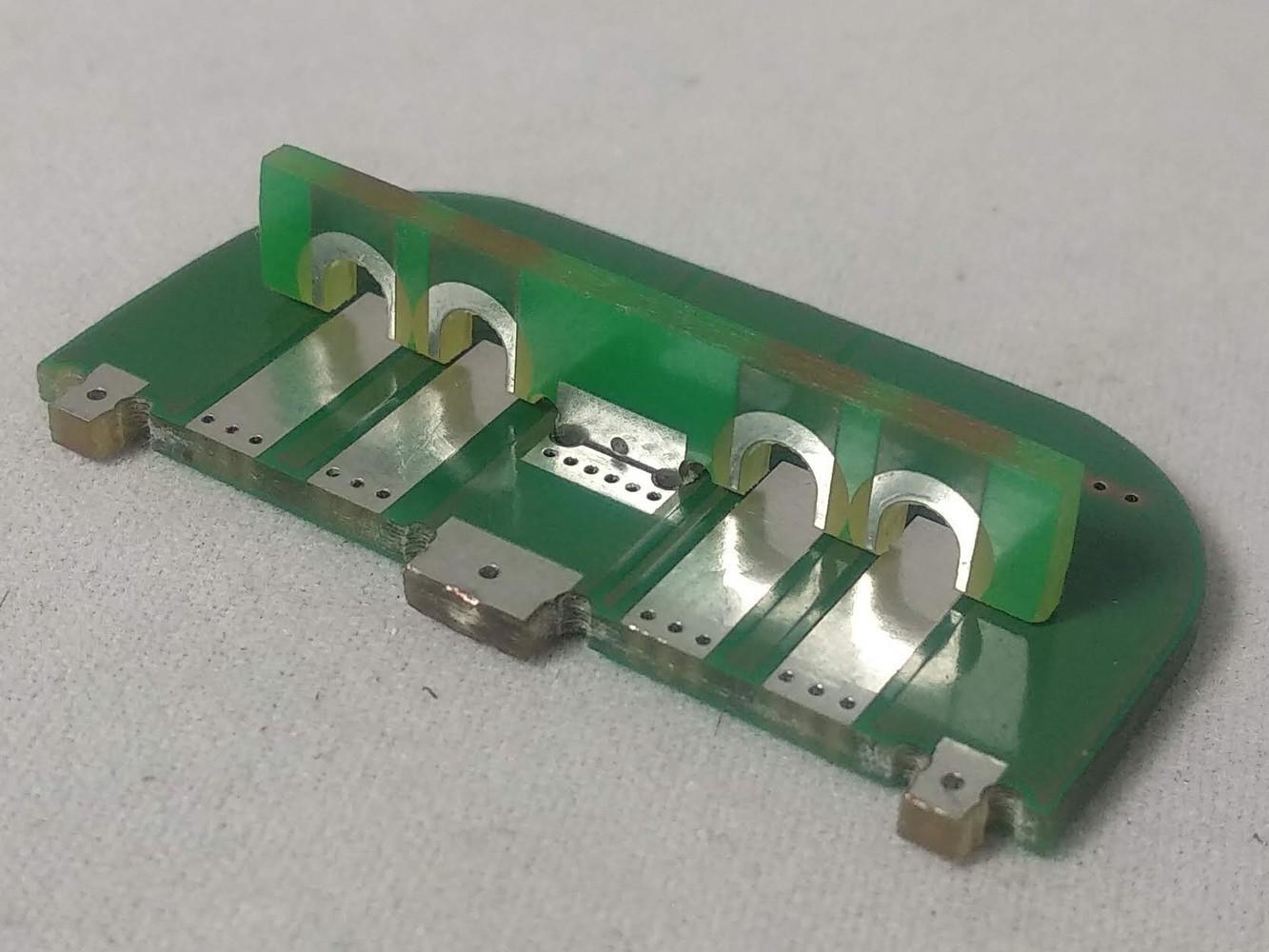
7
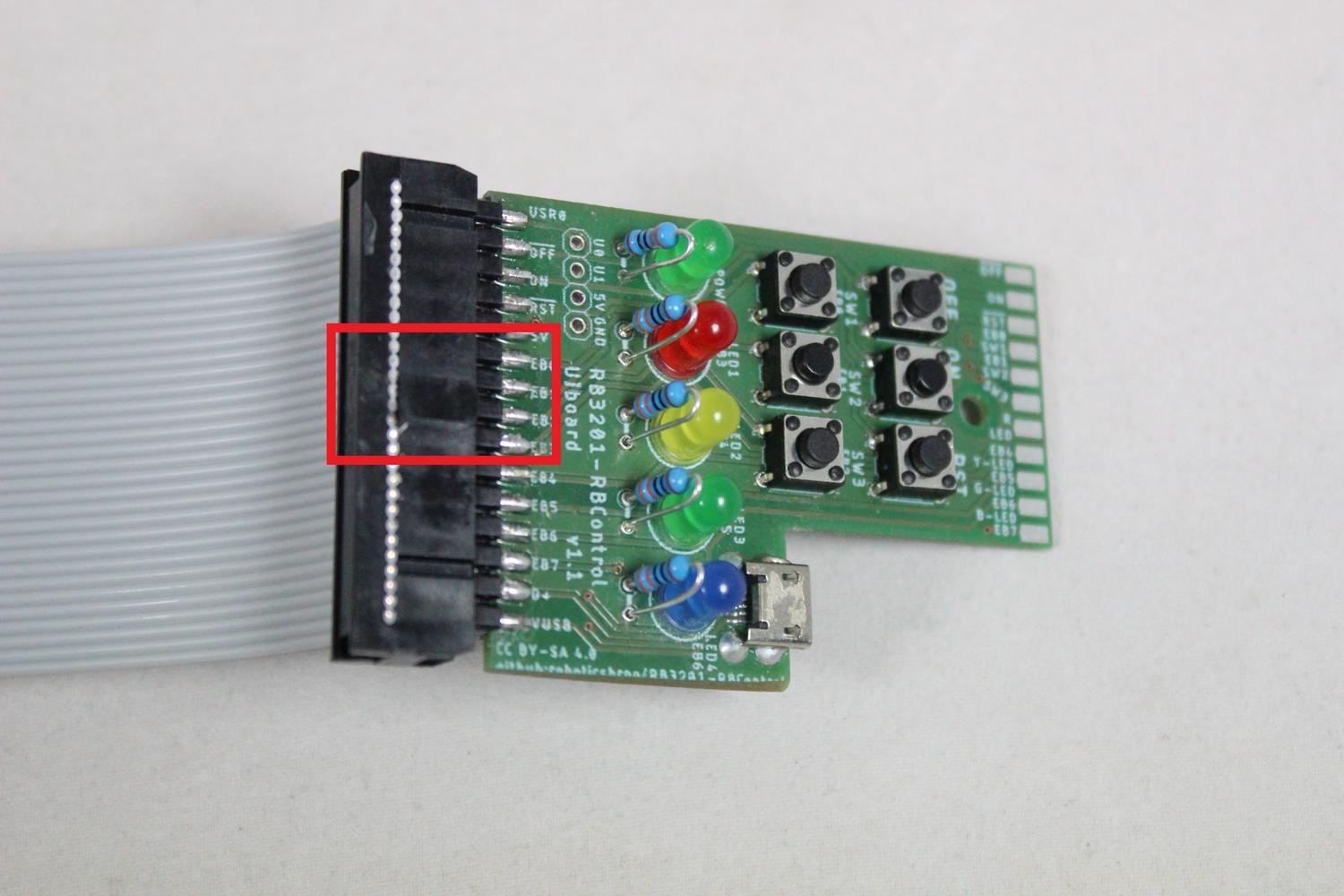
Nyní je potřeba napájet dvouřadý pinheadový konektor délky 15 pinů na plošky u kraje desky. Zapájejte obě řady pinheadů k ploškám na desce.
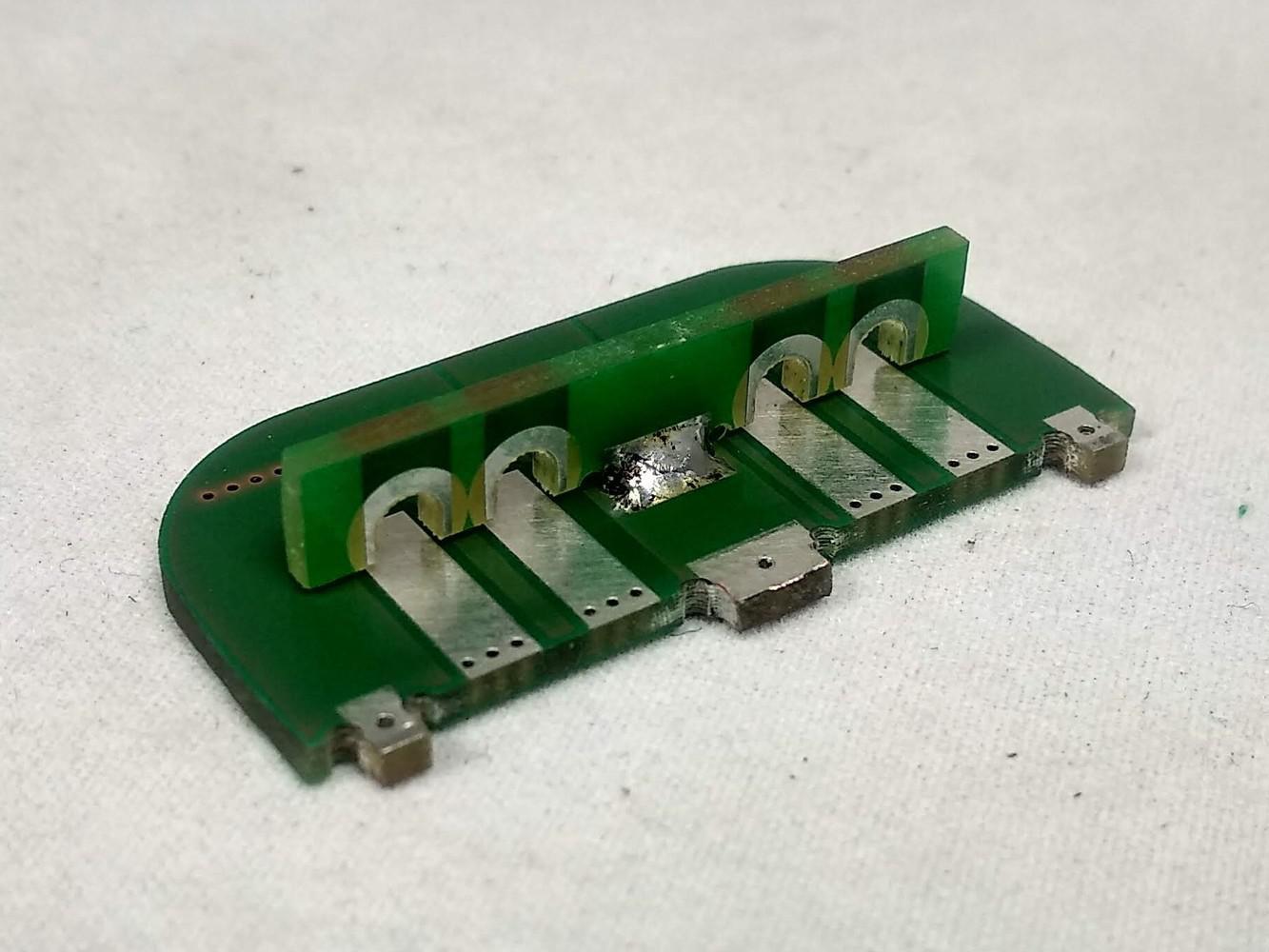
8
Kompletně osazená deska.
9
Na 4 dráty vyčnívající z kabelového svazku natáhneme dva díly krytky jako na obrázku.
10
Připravíme si UIBoard a napojíme na něj kabel. Dále budeme potřebovat USB samce.
11
Do USB na UIBoardu zapojíme protikus, který budeme pájet.
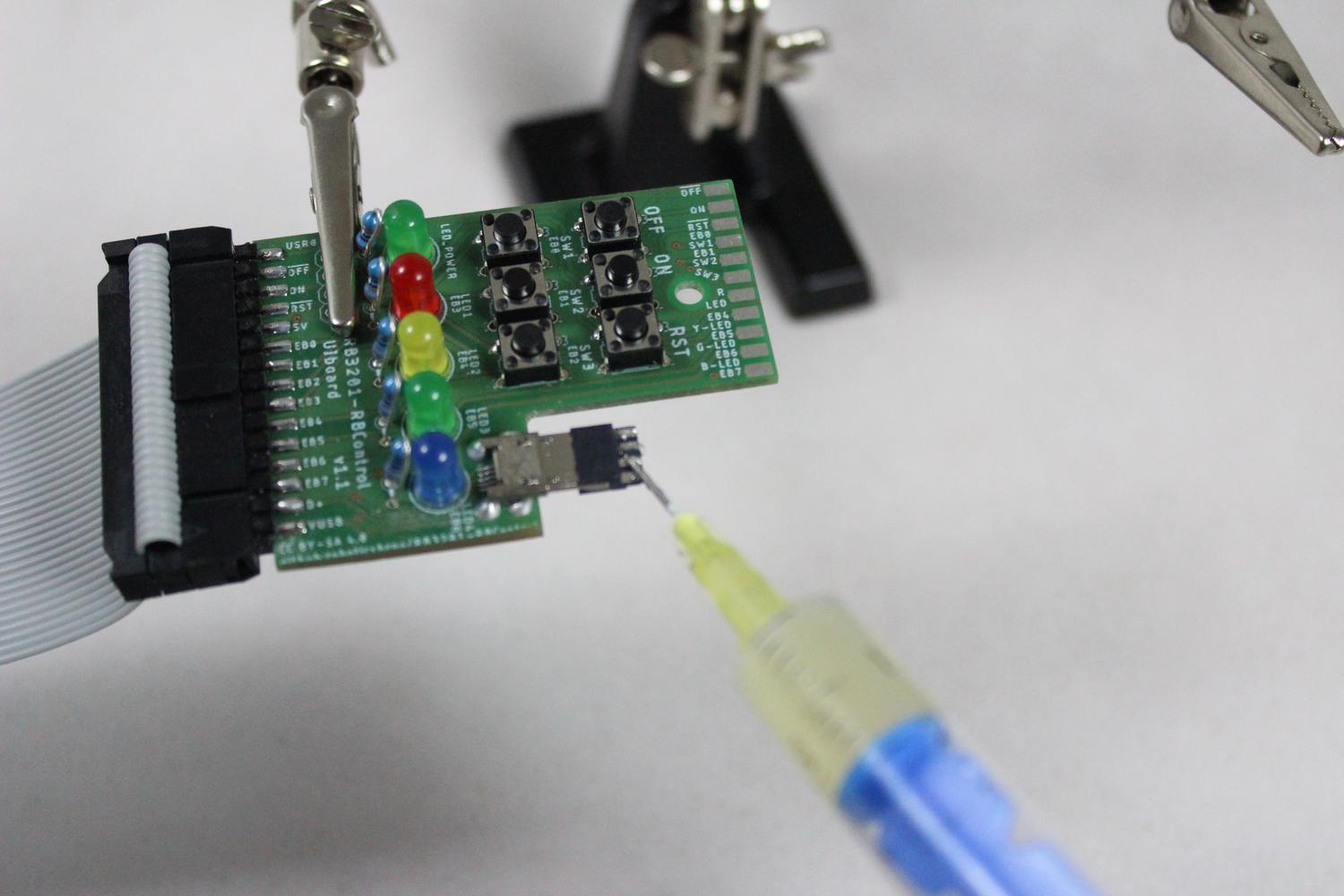
12
Naneseme tavidlo na pájecí plochy USB samce.
13
Naneseme vrstvu cínu na pájecí plochy USB samce.
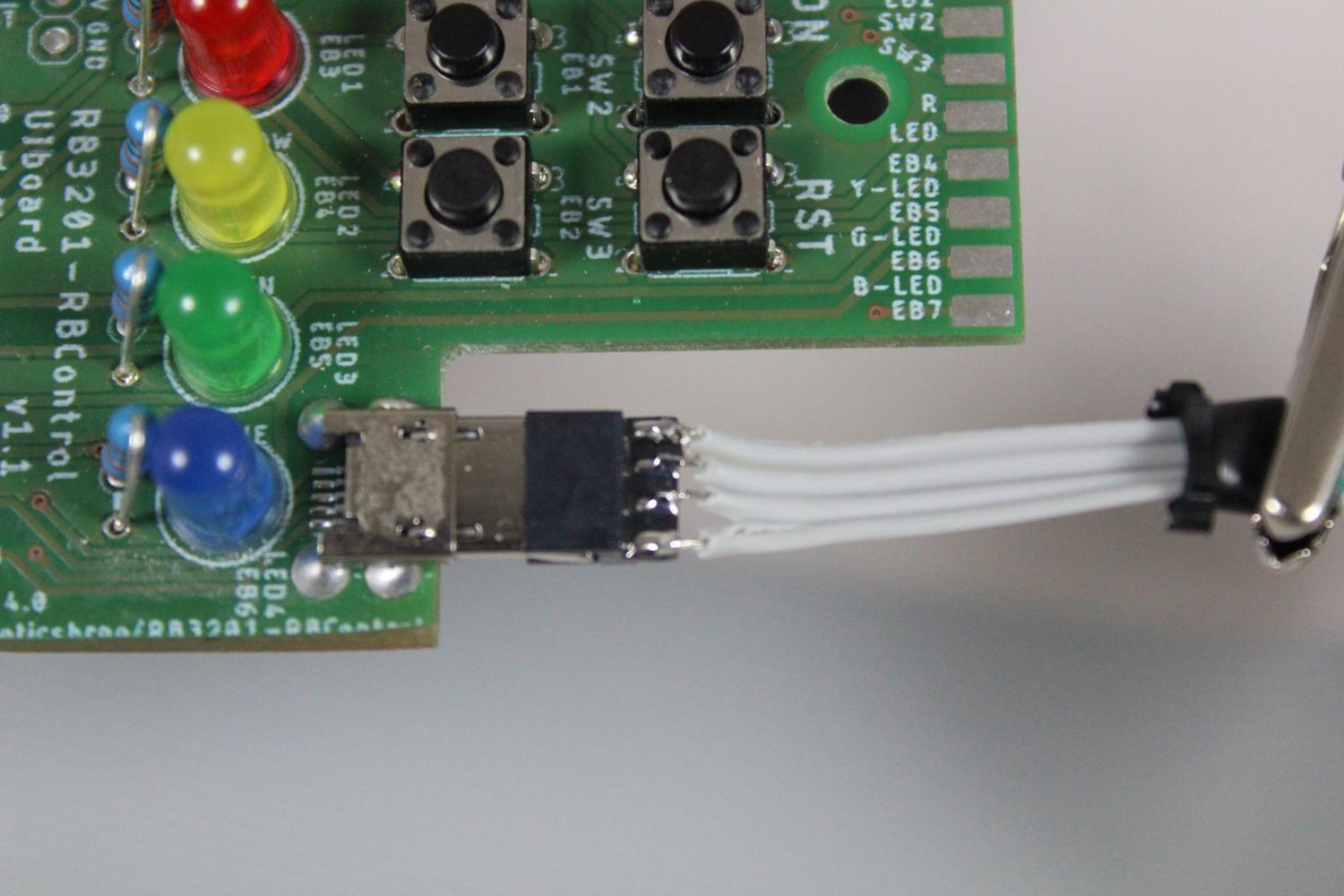
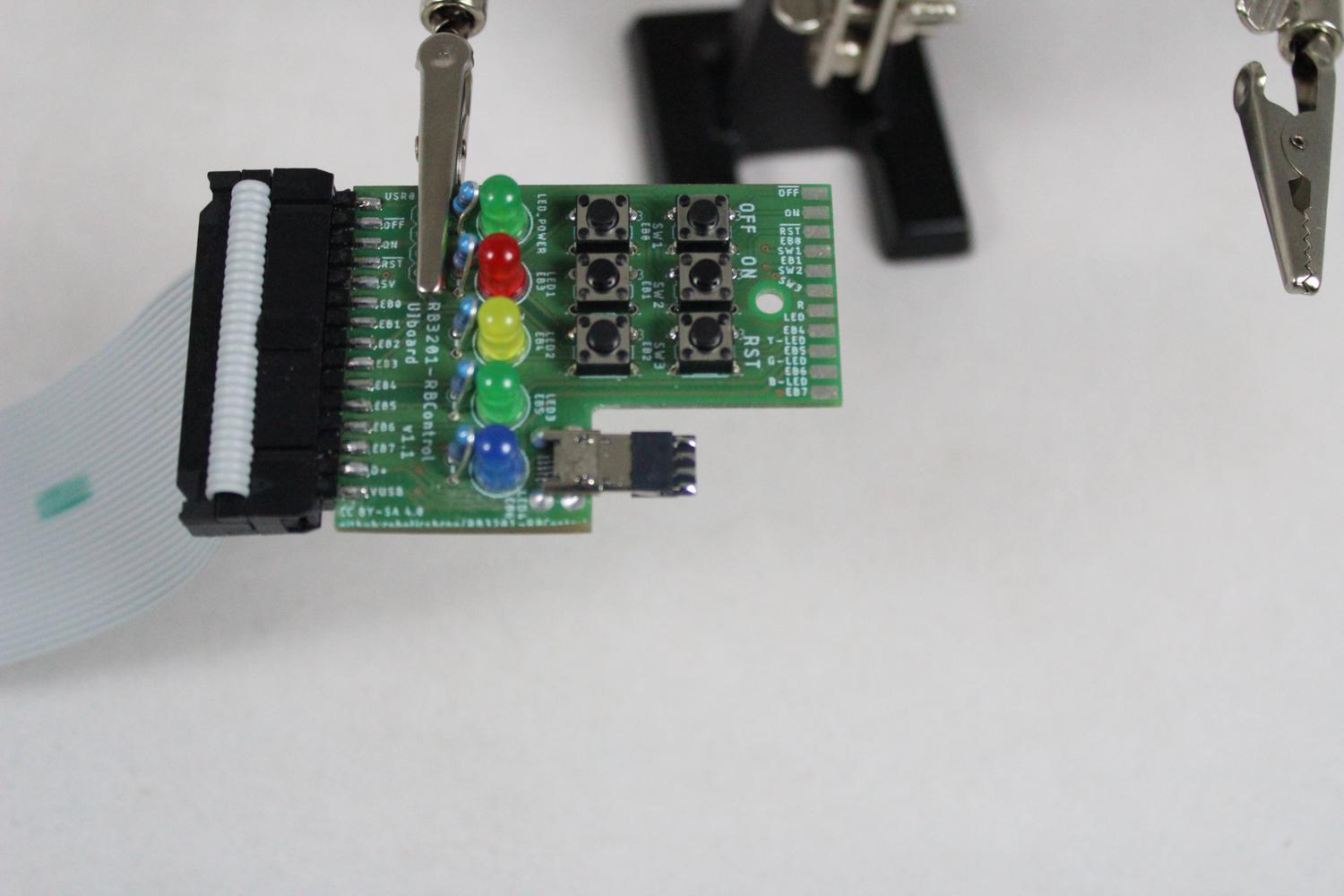
14
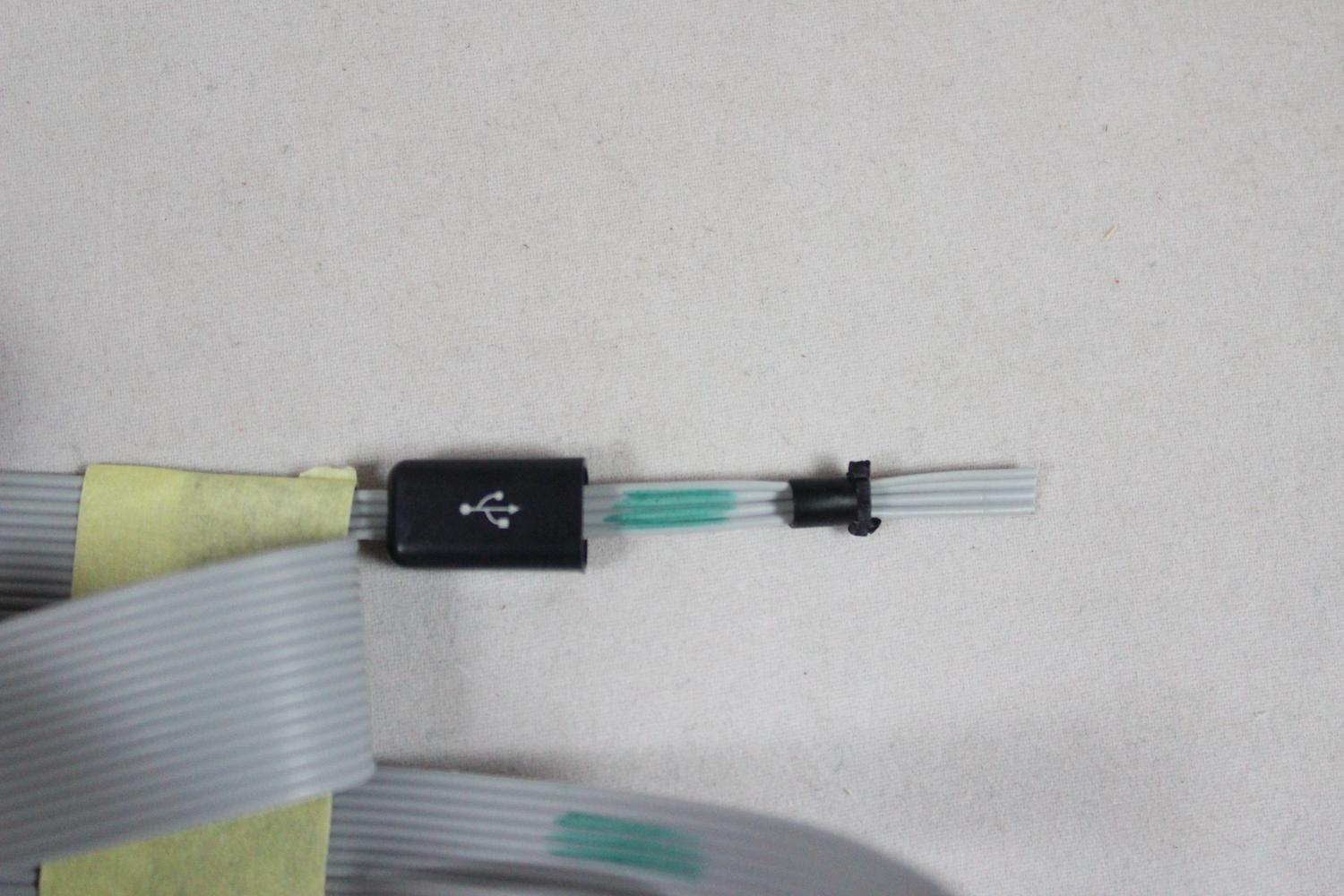
Přiložíme 4 dráty, tak aby kabelový svazek procházel pod UIBoardem a nekroutil se. Napájíme drát po drátku.
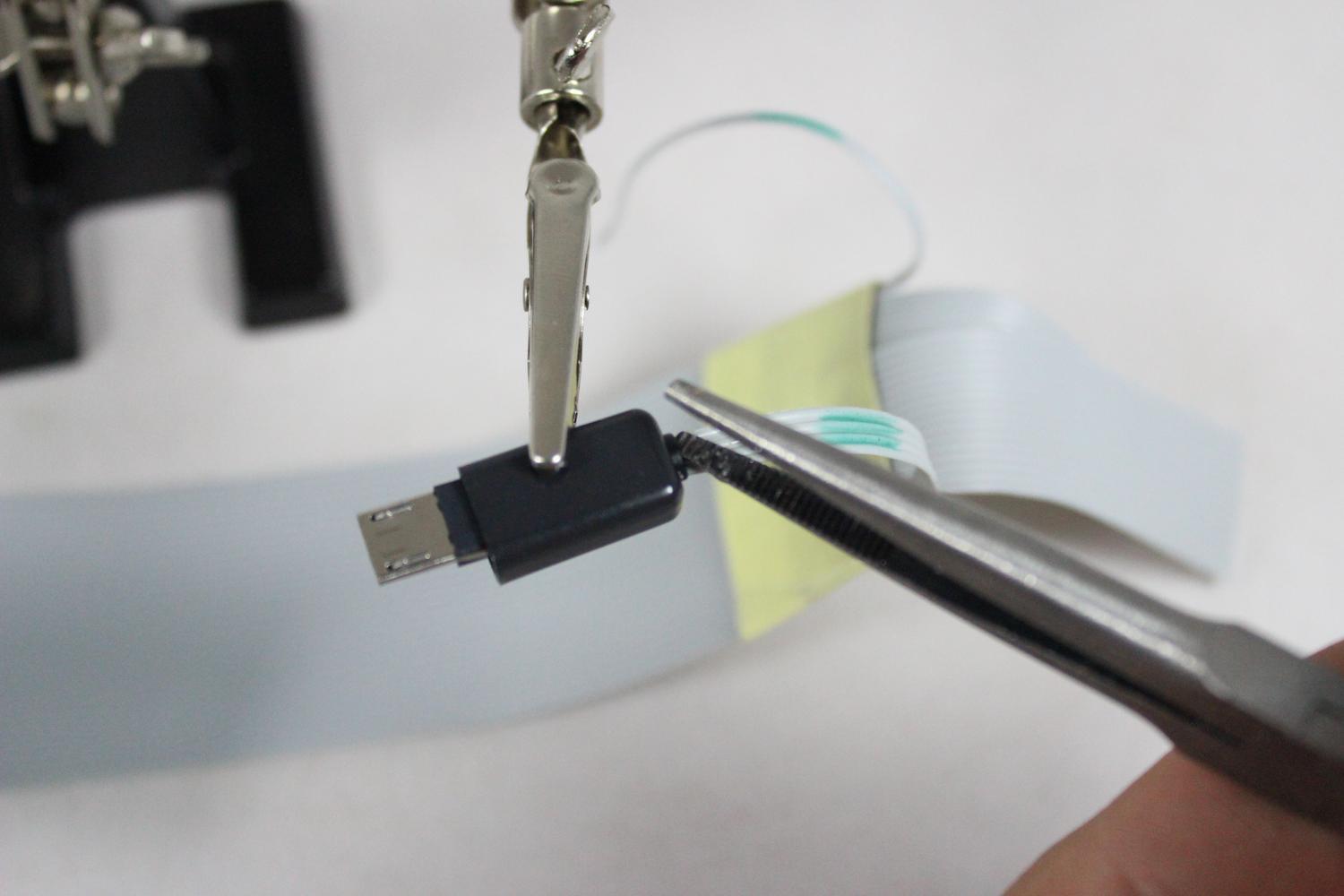
15
Nasuneme krytku a vytáhneme gumový kousek.

16
Takhle to bude vypadat.
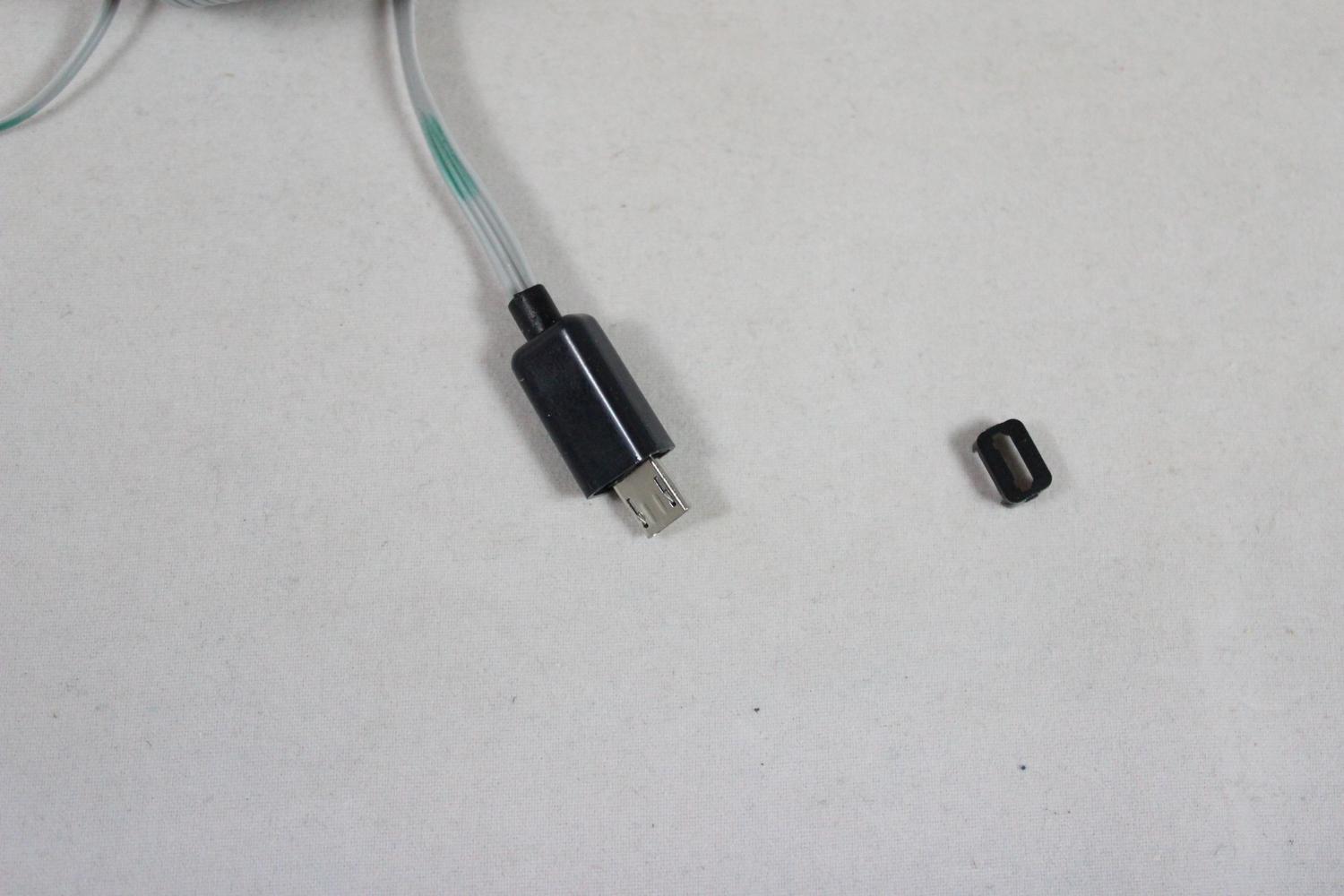
17
Připravíme si přední krytku.

18
Nasuneme přední krytku.

19
Zacvakneme krytku a máme hotovo.
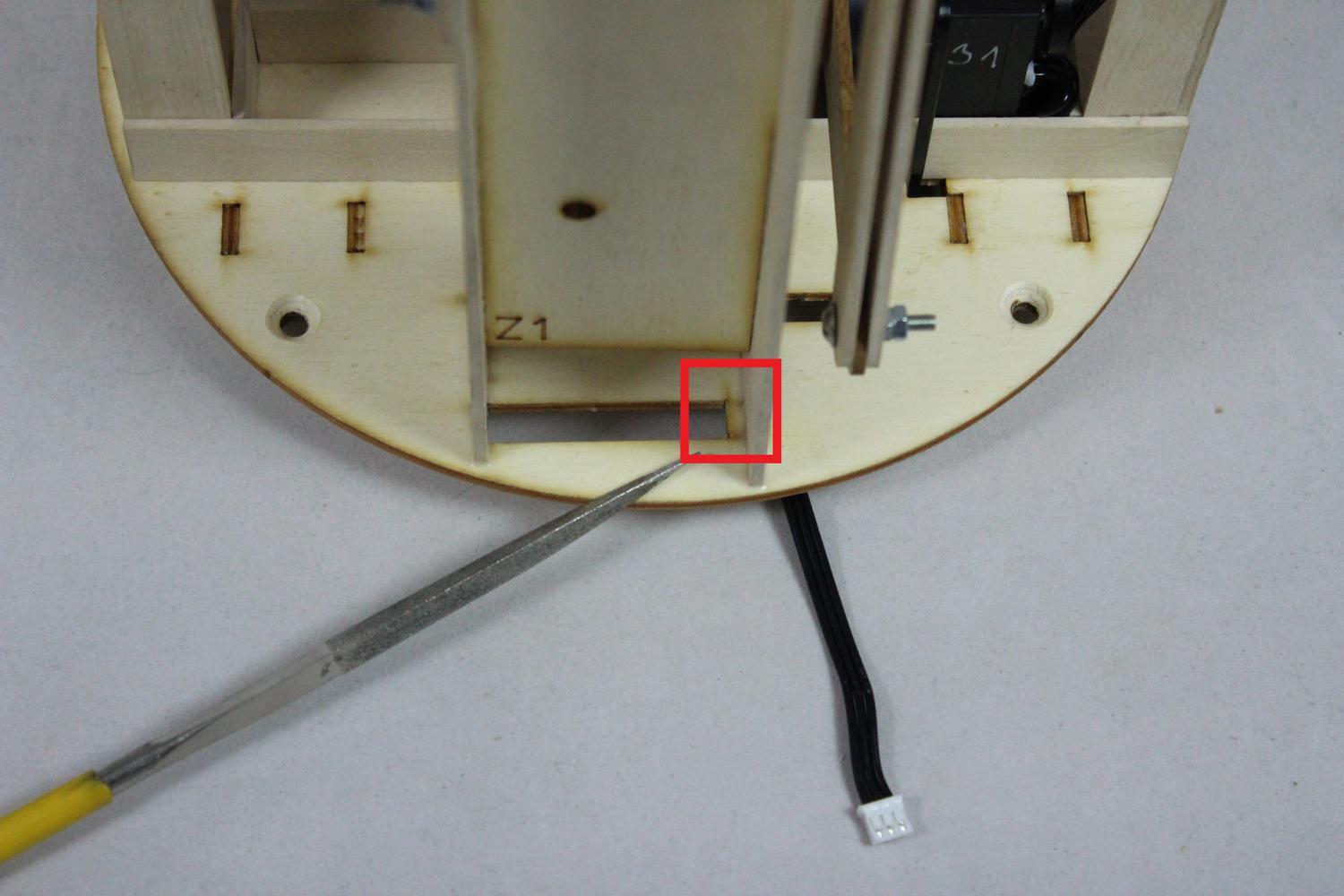
20
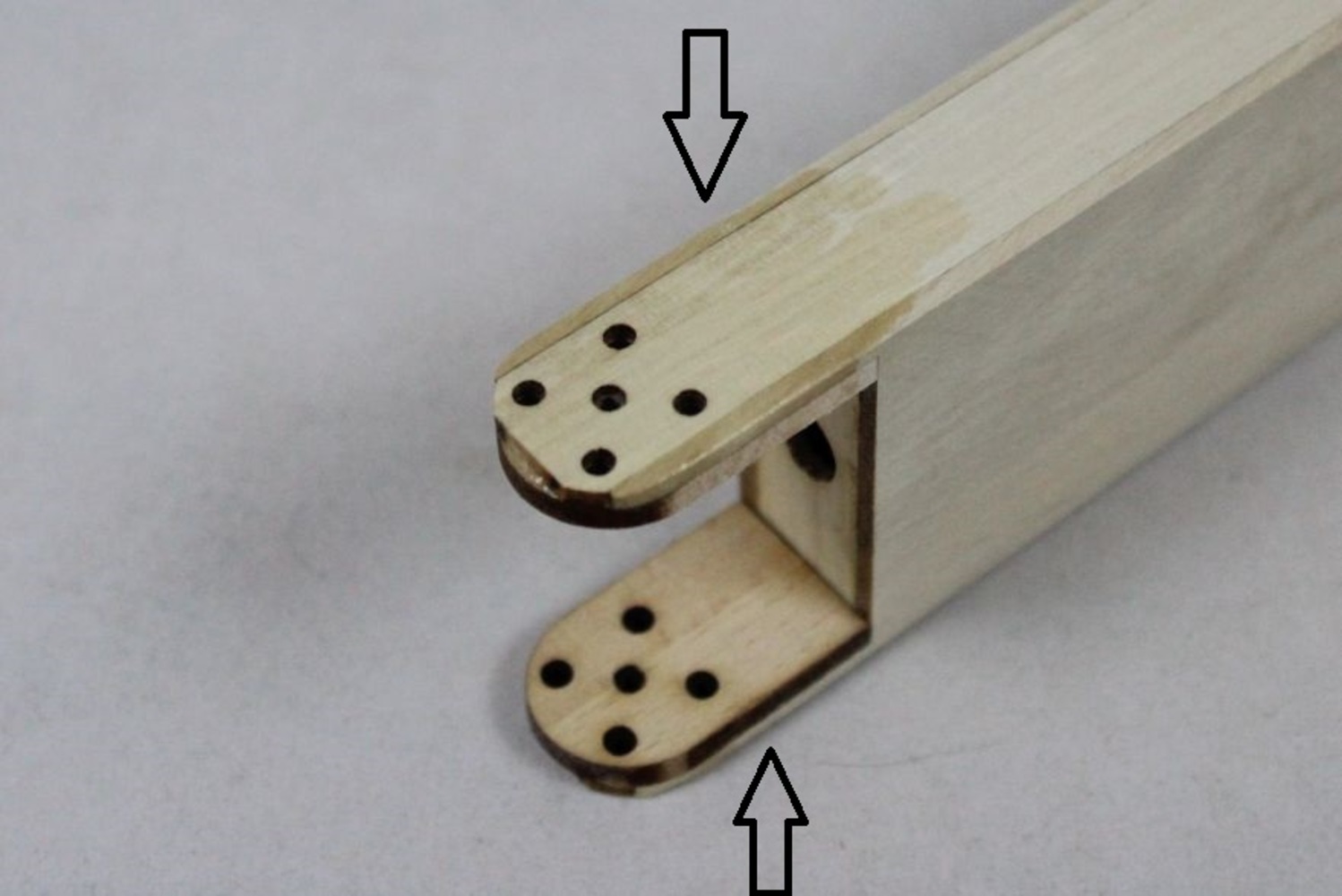
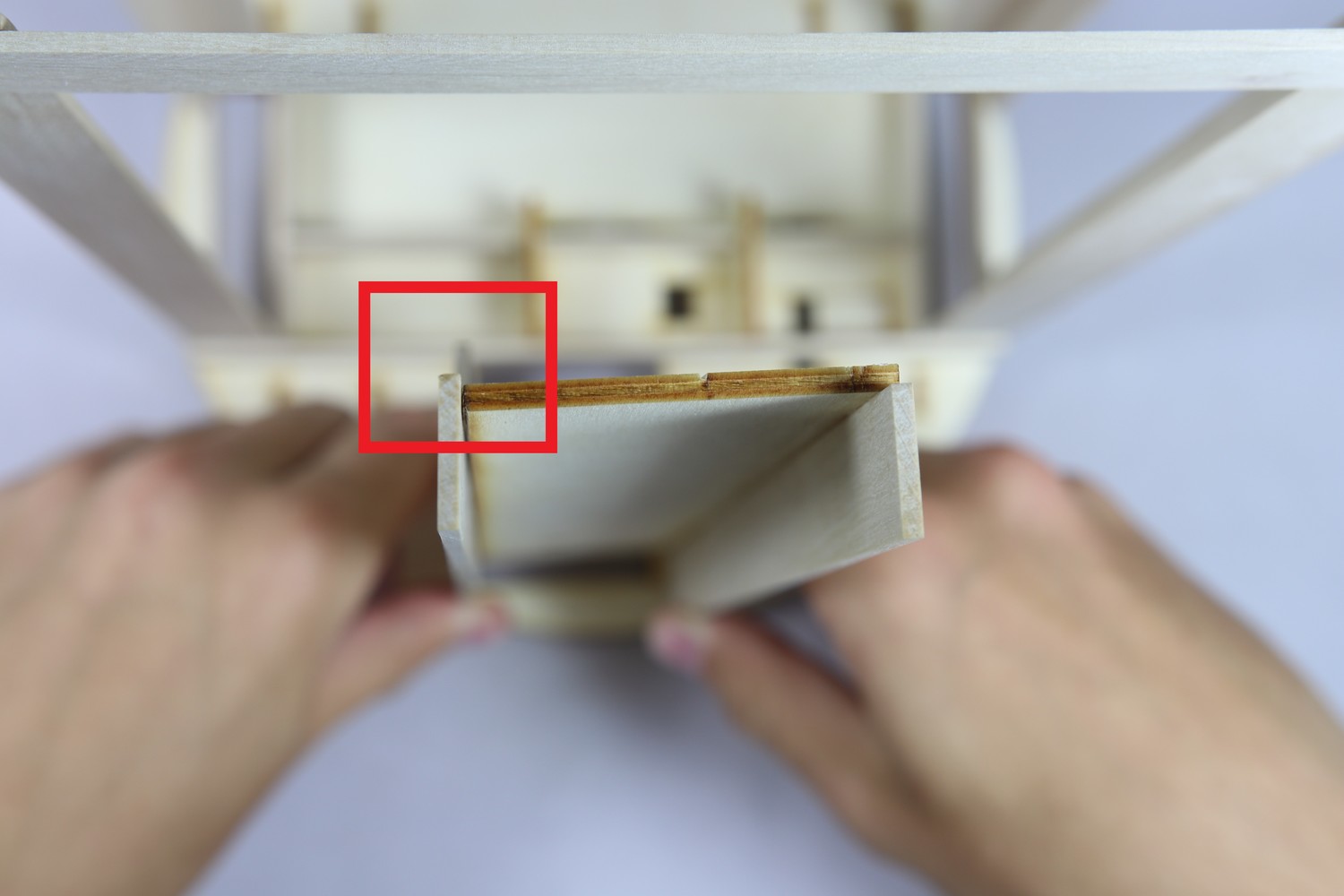
Nyní musíme na konstrukci robota odpilovat tuto část.
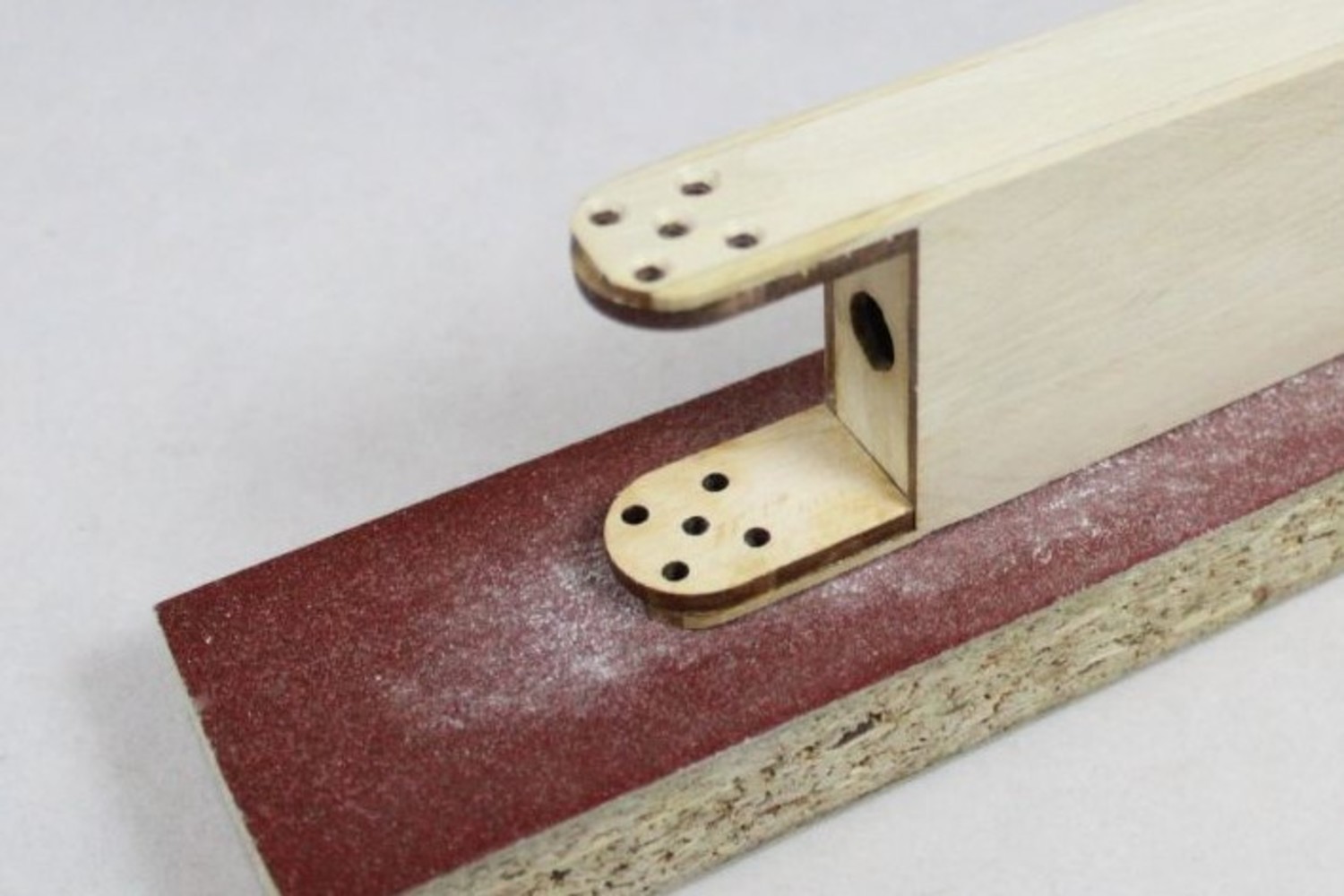
21
Odpilujeme ji, tak aby lícovala se svislým dílem.
22
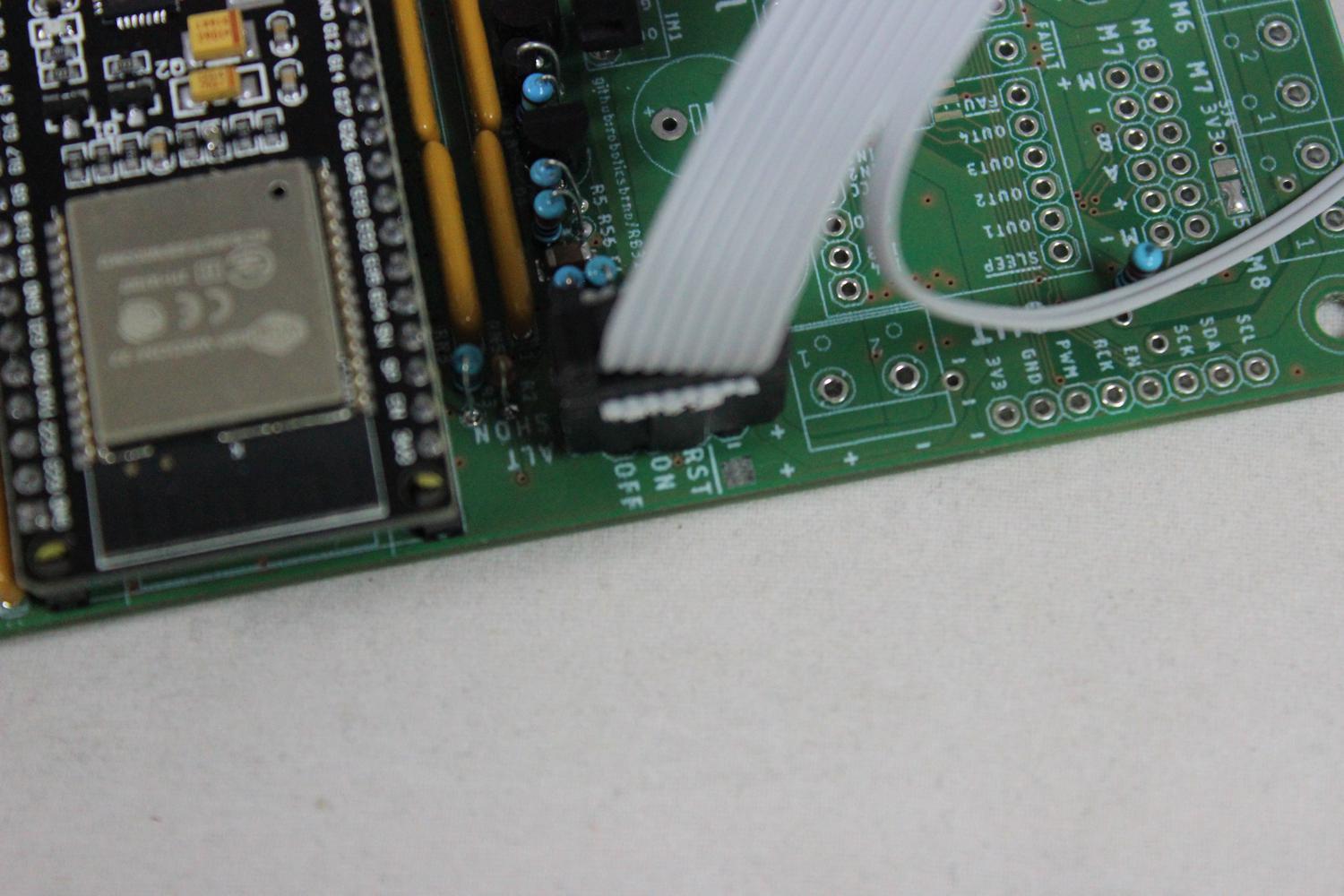
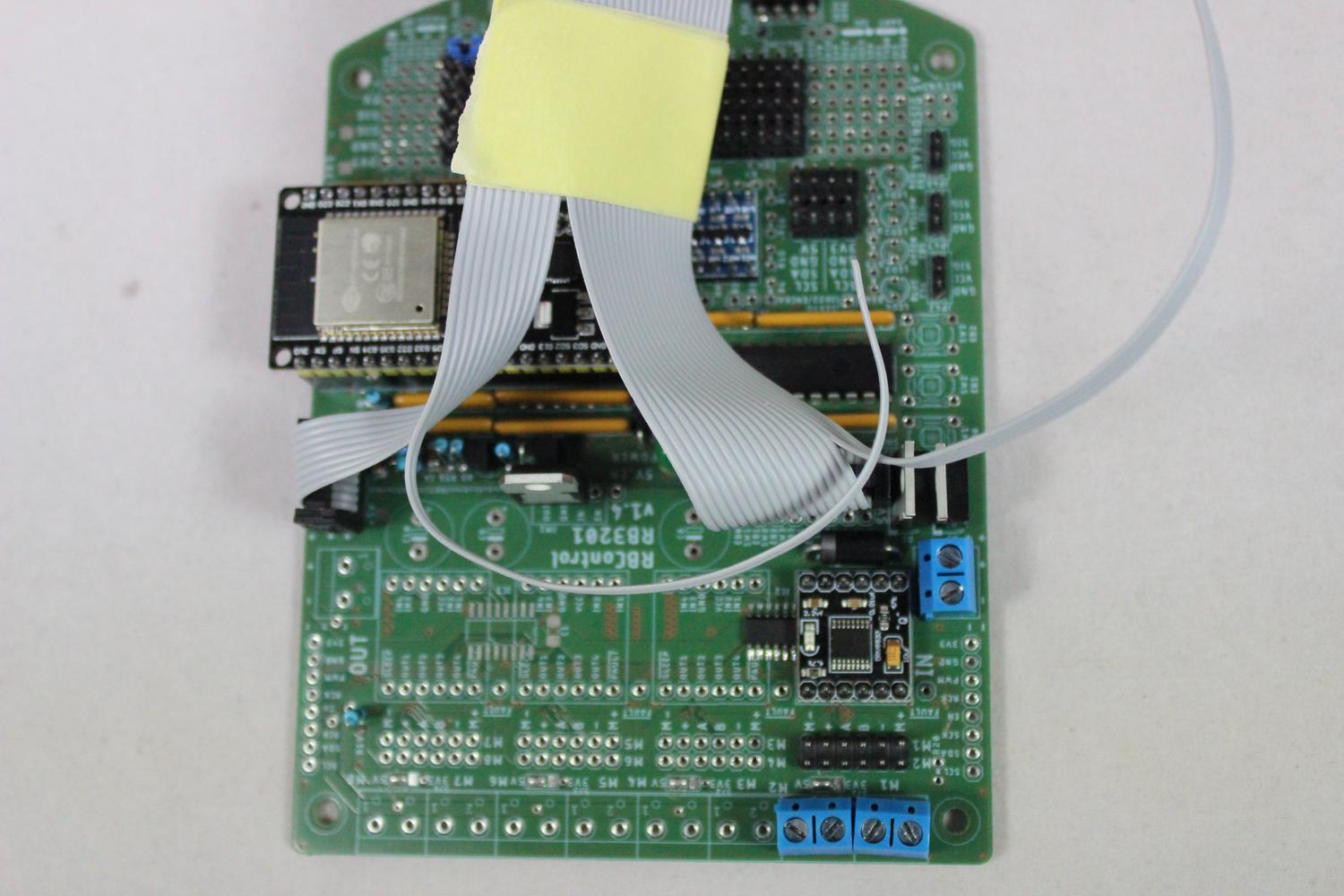
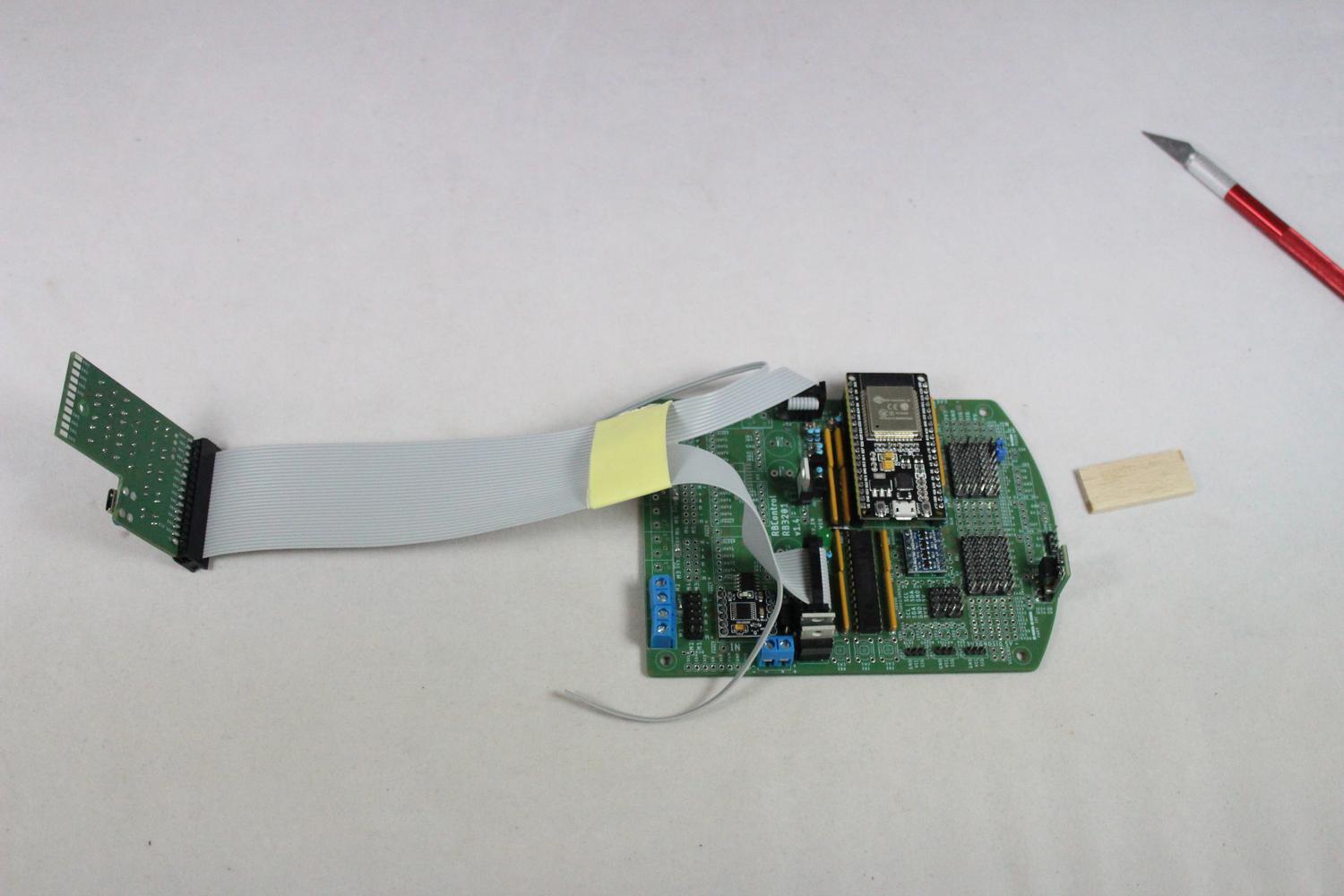
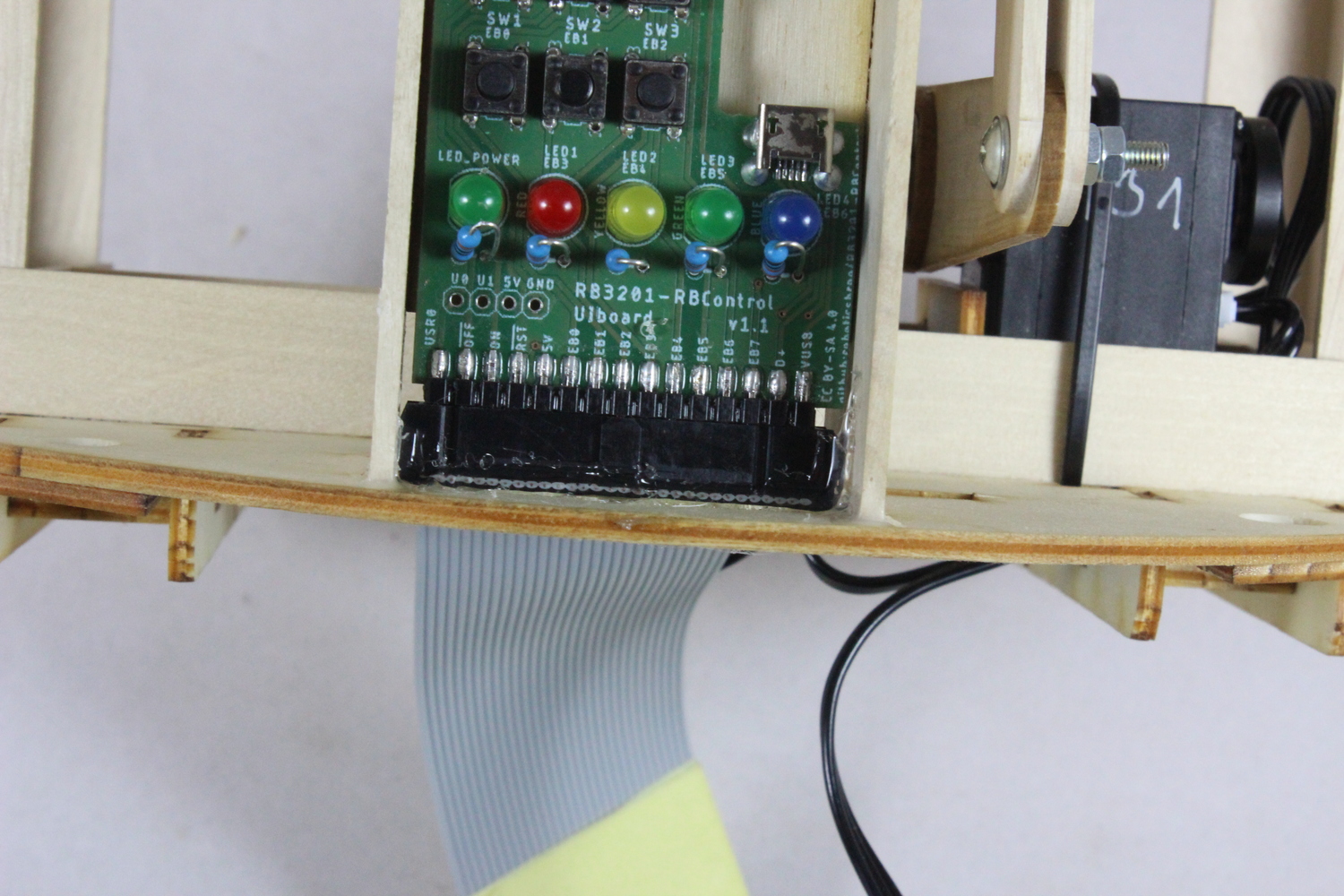
Nyní vezmeme propojovací kabel a zapojíme jej nosem nahoru na stranu součástek, jako na obrázku.
23
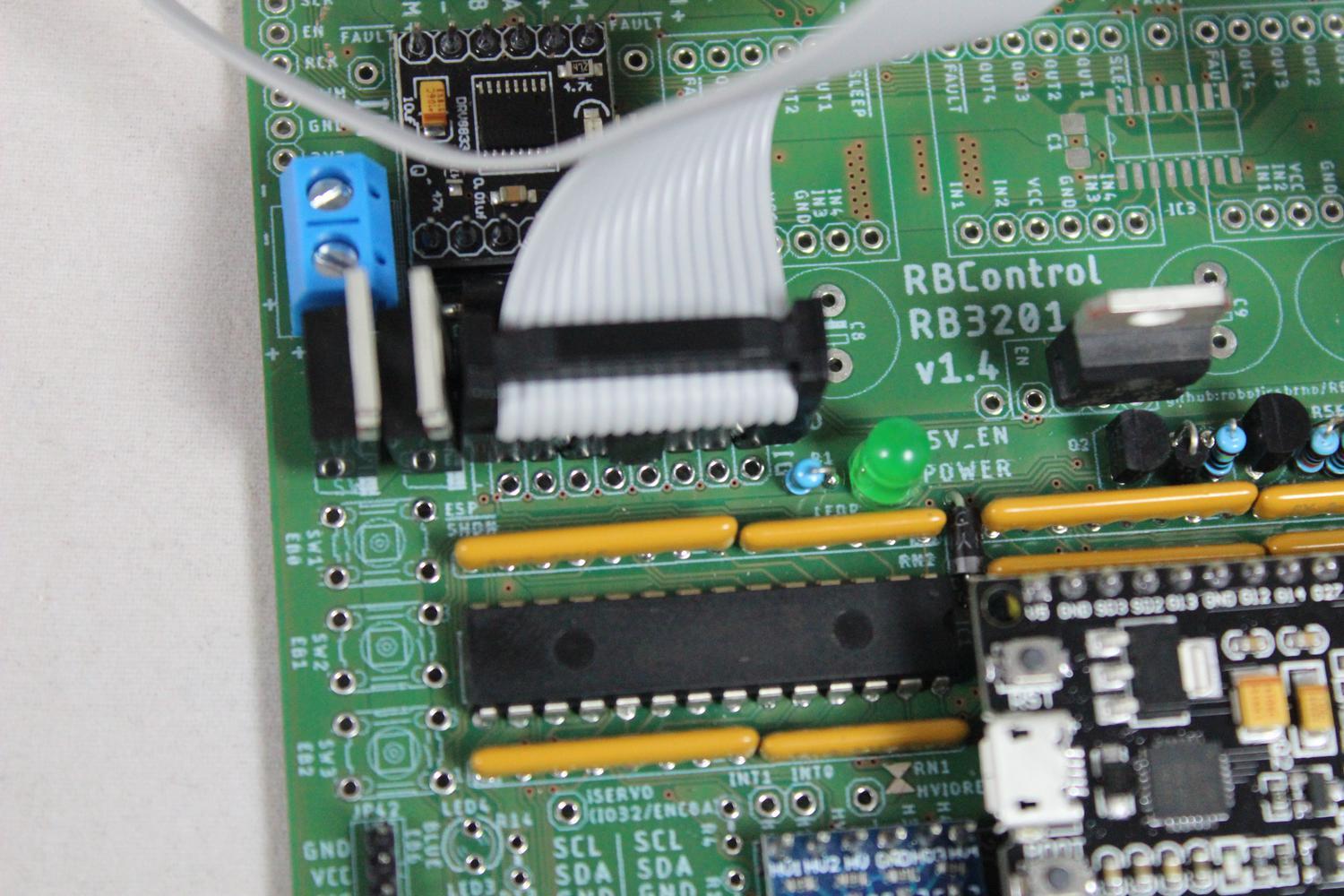
Větší konektor na druhé straně kabelu zapojíme do RBcontrolu, tak jak je na obrázku.
24
Menší konektor zapojíme na ovládací piny tak jak je na obrázku.
25
Takto vypadá zapojení na RBC.
26
Kompletní zapojení kabelu.
27
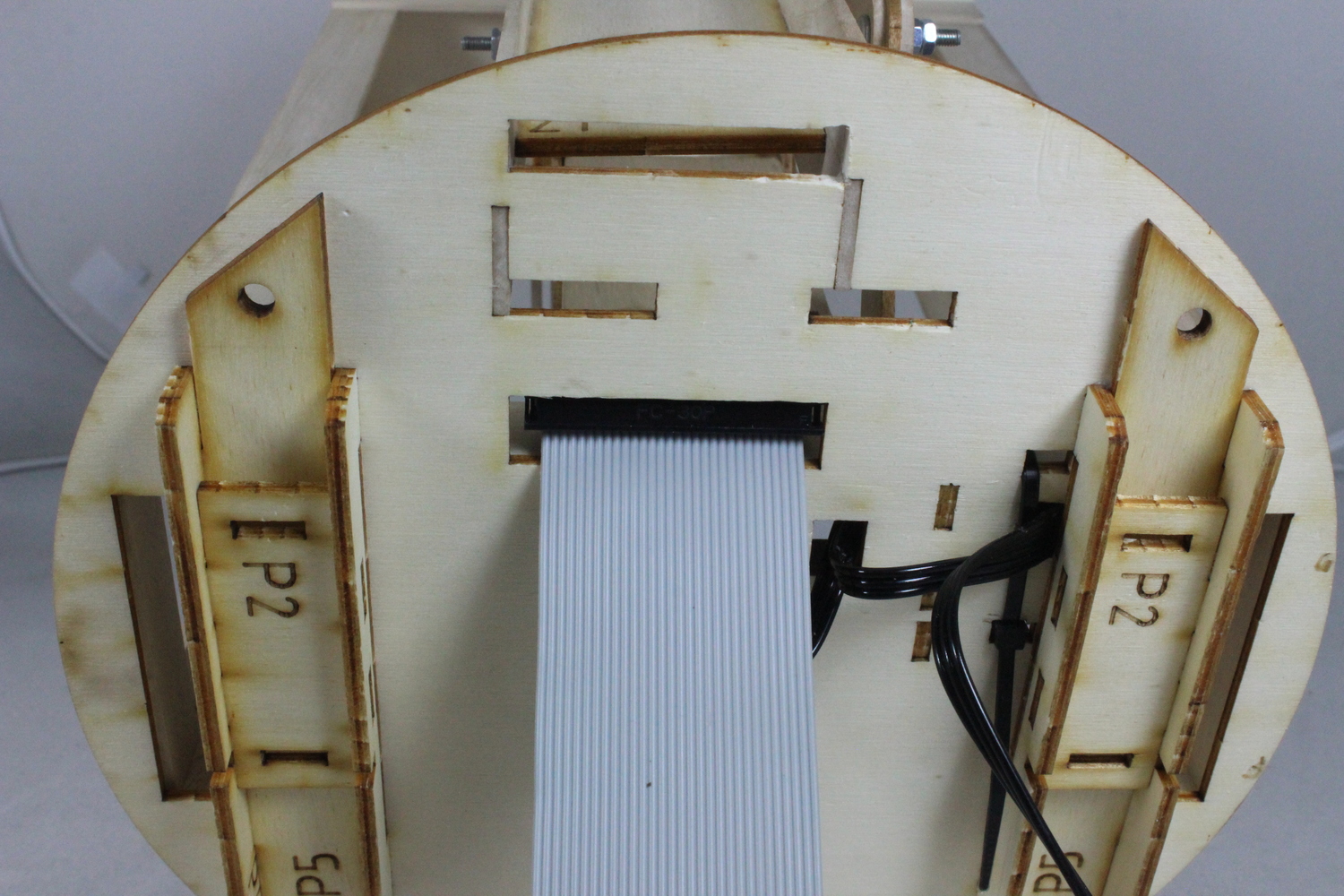
UIBoard nyní vyjmeme a kabel zasuneme zespod do paluby.

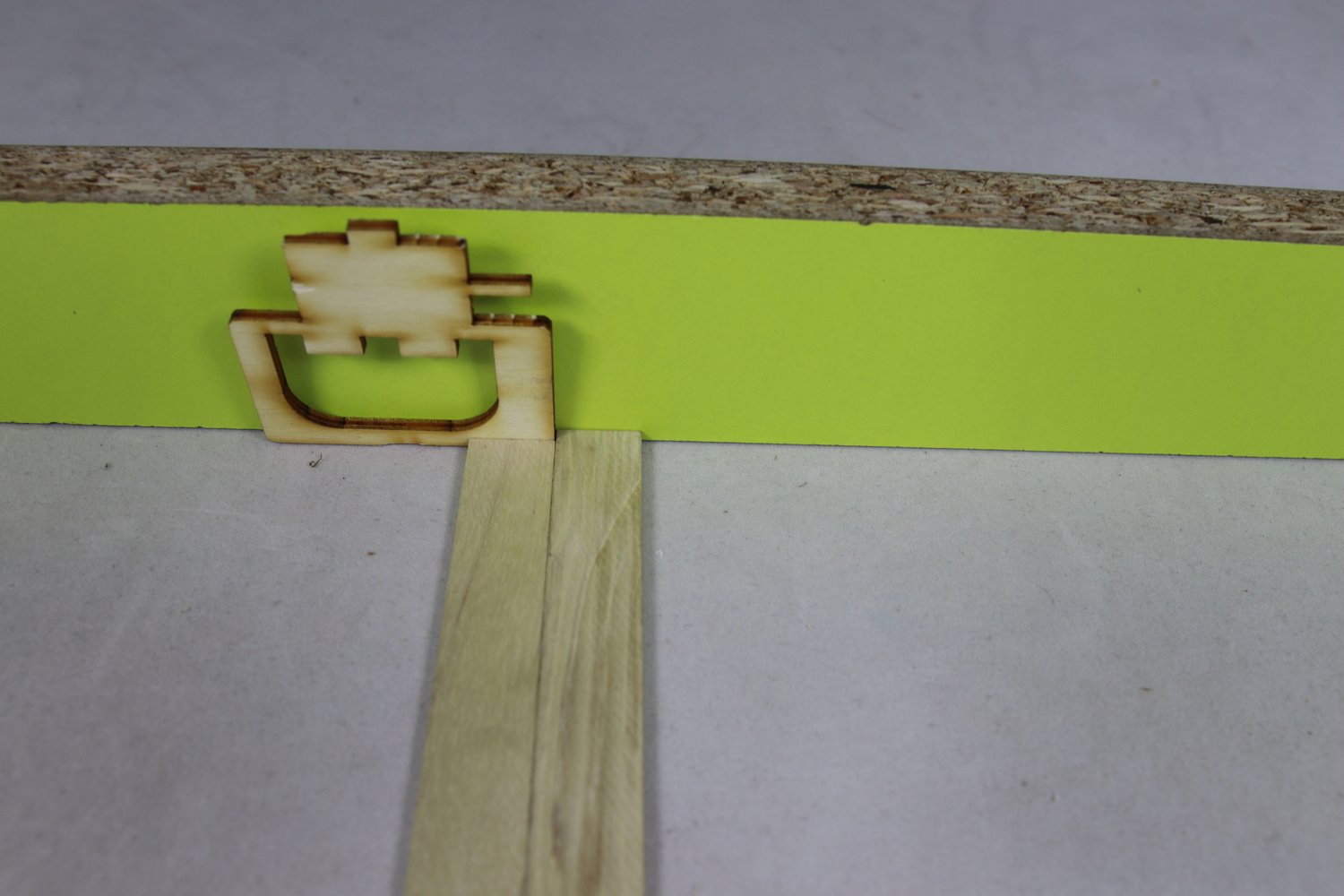
28
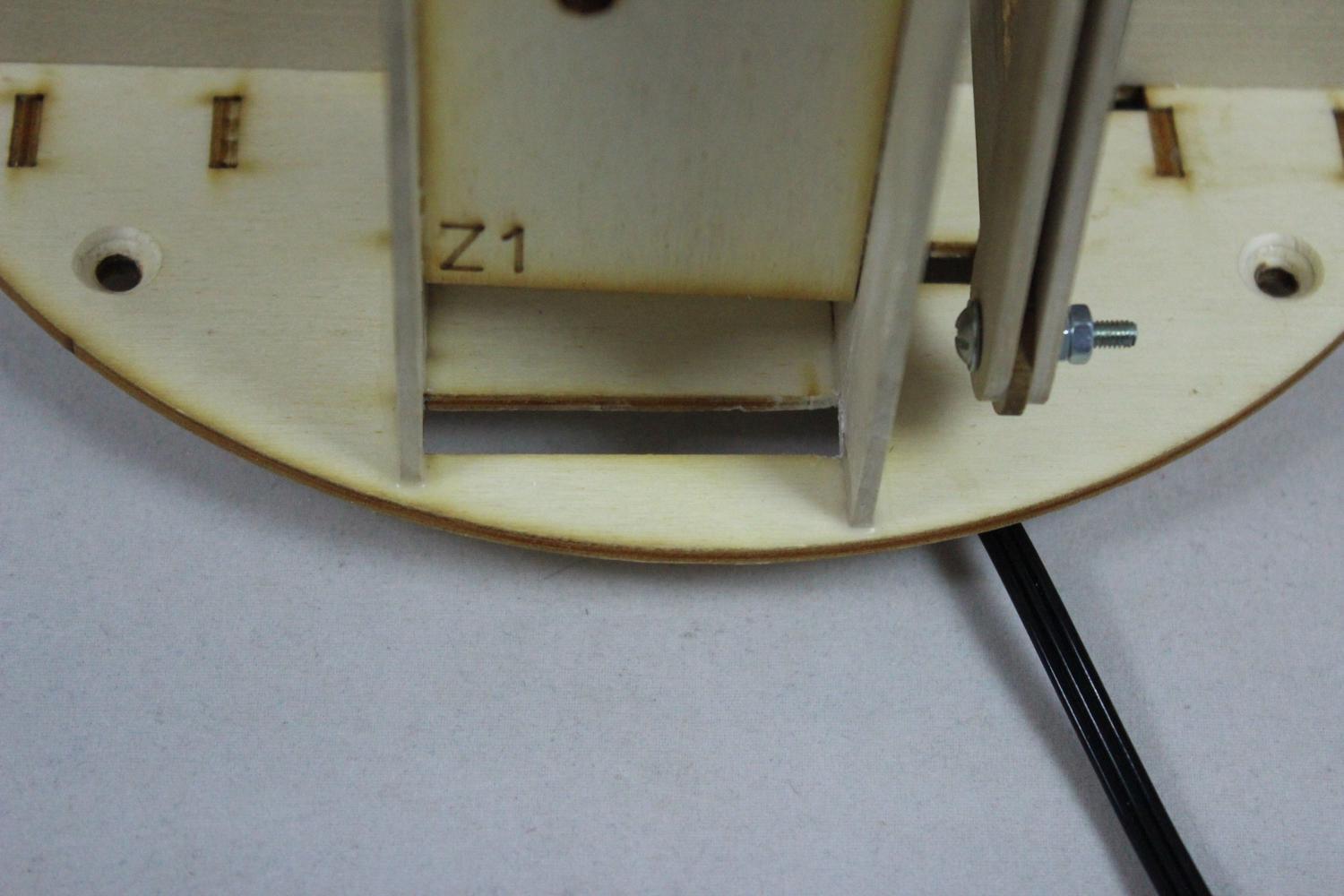
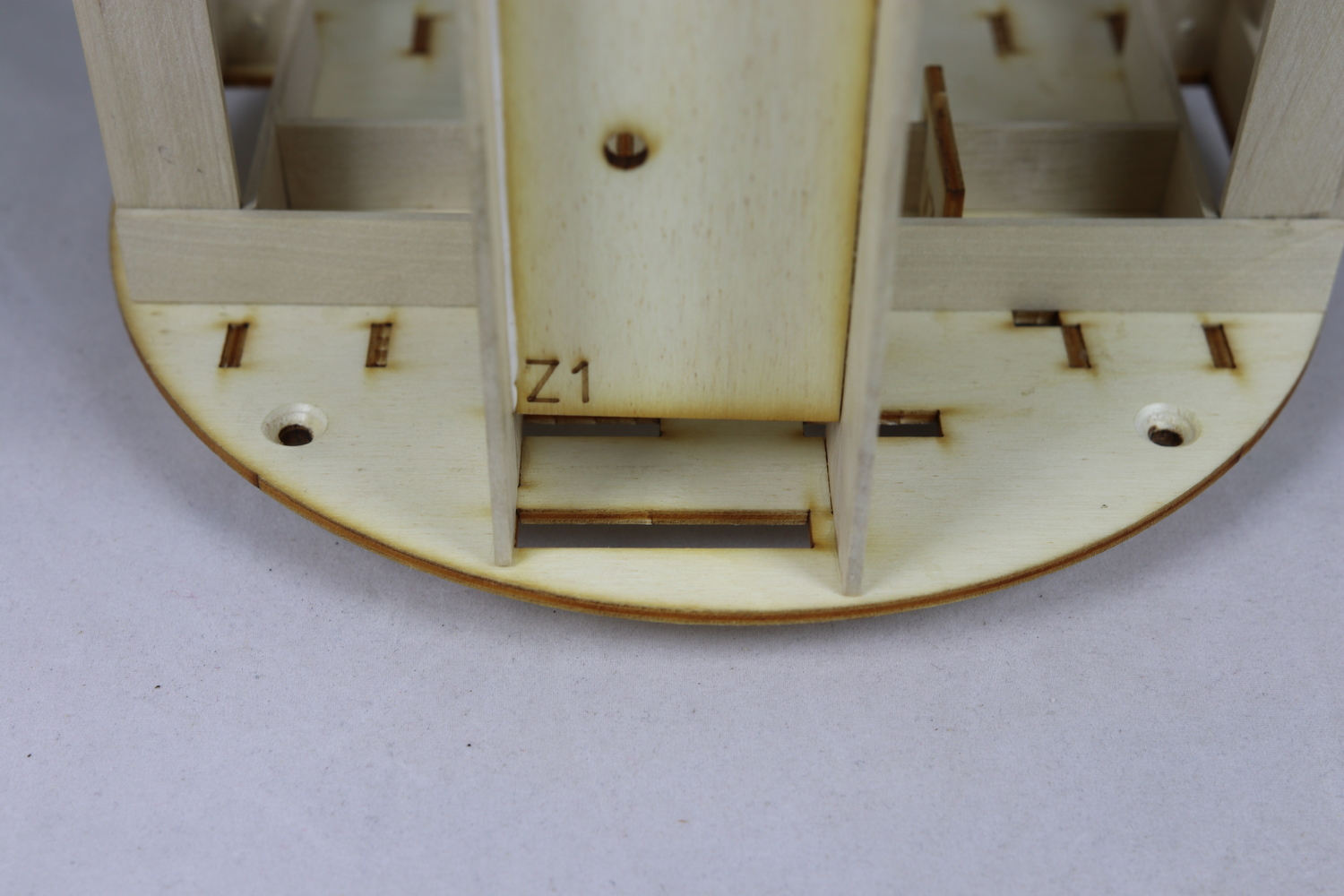
Poté jej vtáhneme pod dílem Z1.

29
Teď zatlačíme kabel nahoru podle obrázku. Do spod dáme tavné lepidlo.

30
Zatlačíme konektor dolů a horní část doplníme tavňákem.

31
Necháme lepidlo ztuhnout a seřízneme přebytečný tavňák do roviny.
32
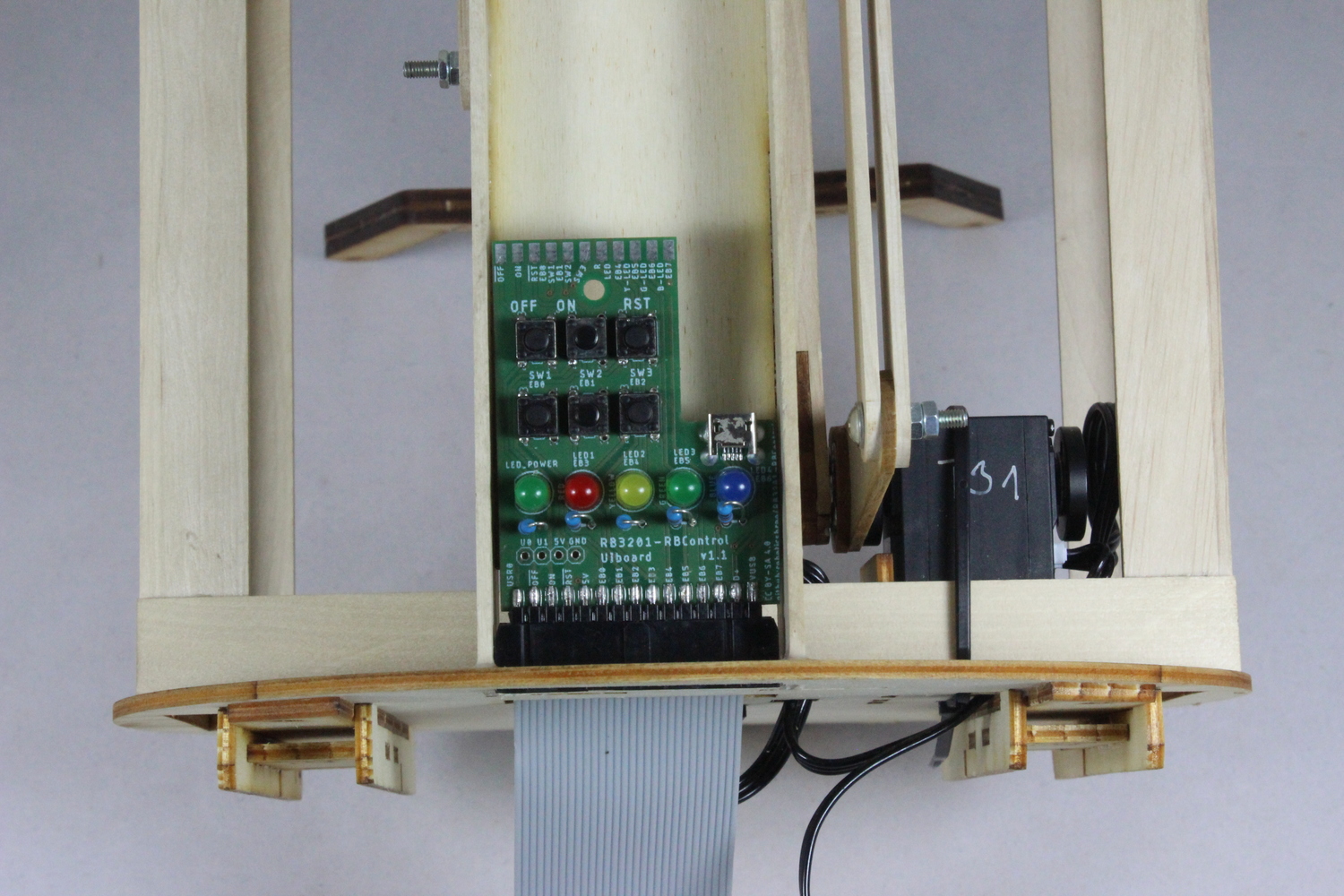
Vložíme UIBoard do konektoru.

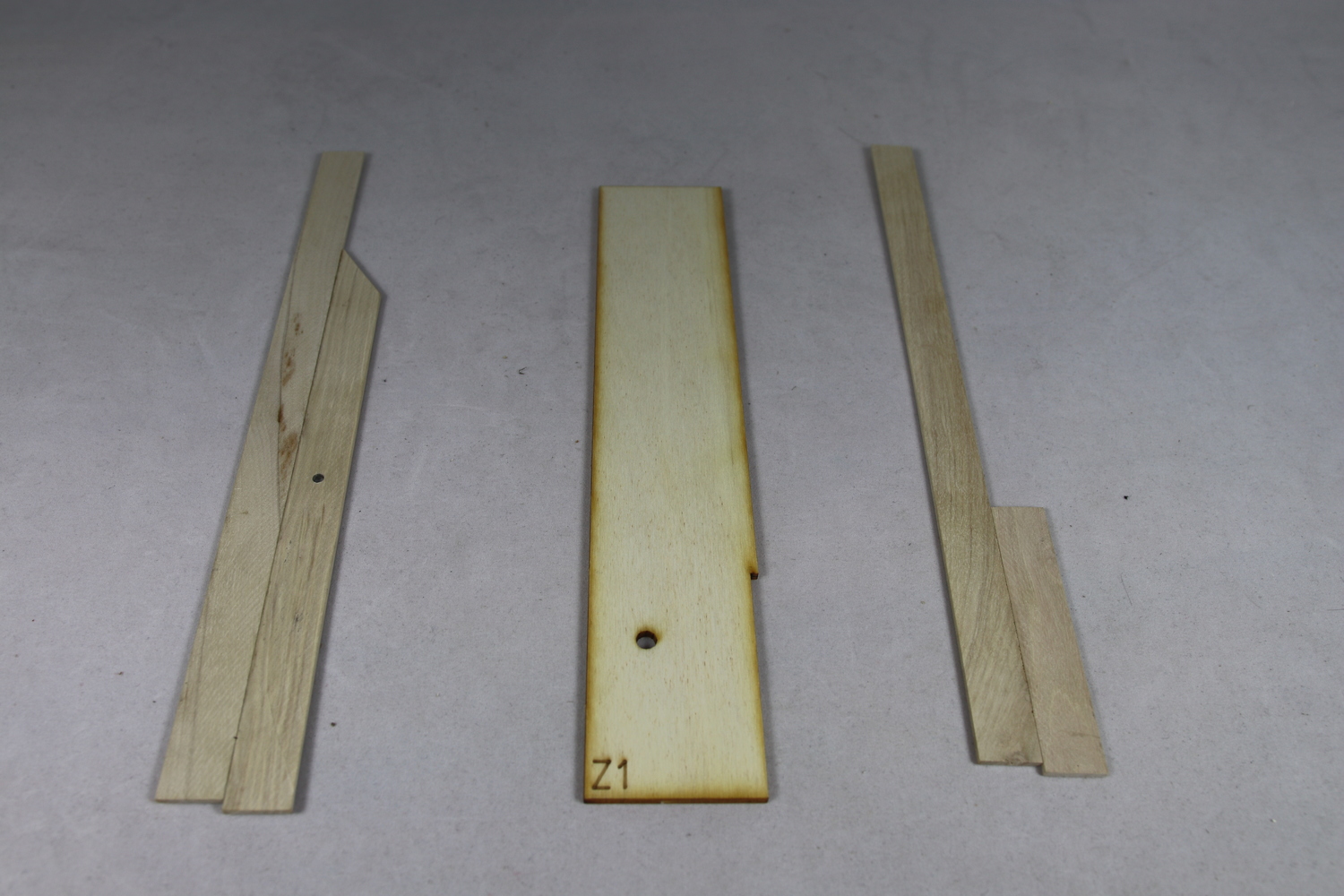
33
Kulatým otvorem v horní části UIboardu uděláme tužkou díru na díl Z1. Vyjmeme UIboard.
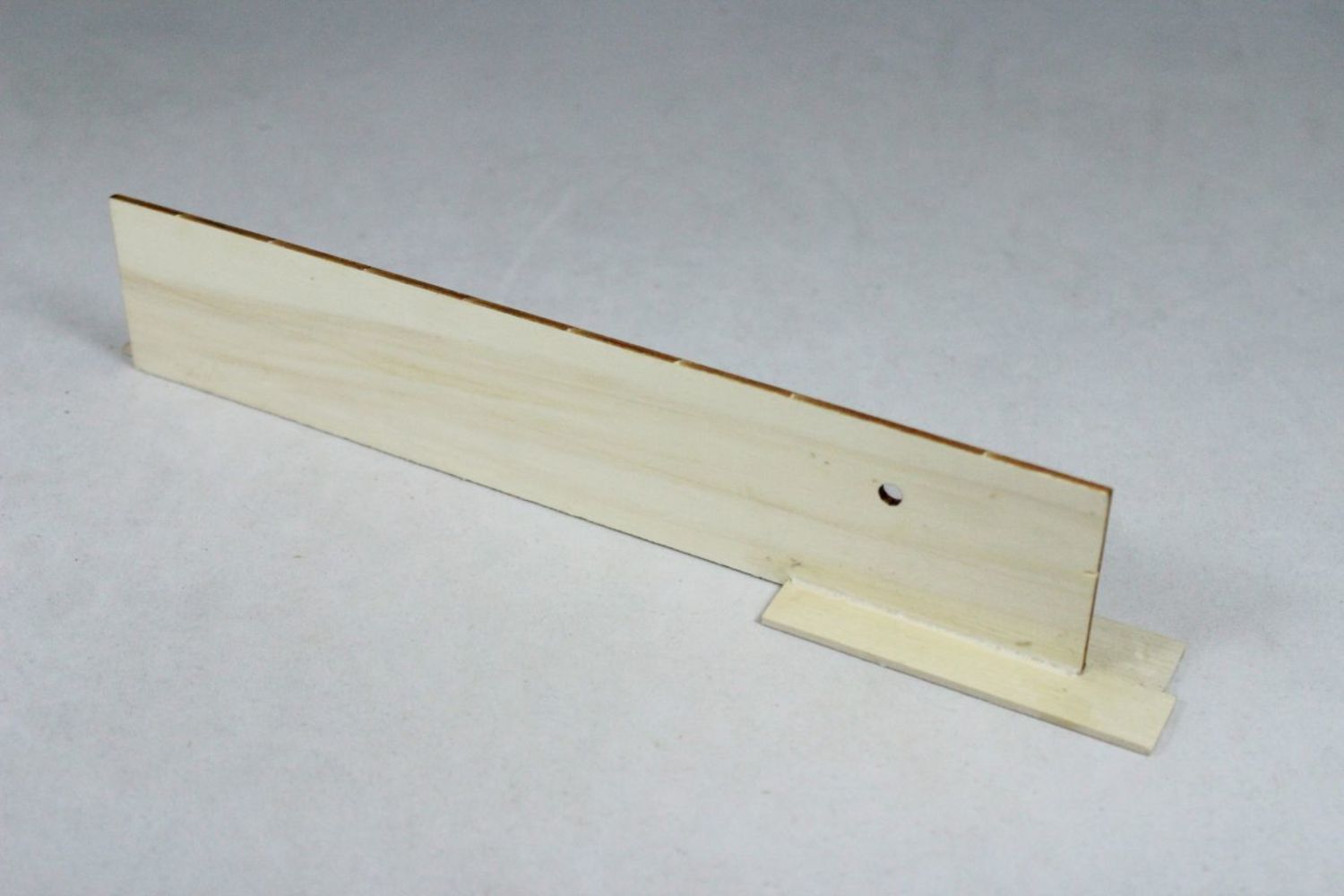
34
Nyní probrousíme díru na místě tečky v Z1. Brousíme od laserem vypálené díry v Z1. Poté je možné UIboard přišroubovat k dílu Z1 pomocí šroubu a matky M3.
Příprava serv
Nyní musíme všem servům nastavit správné ID a nastavit je do středové pozice (120°), která se předpokládá pro správné namontování. Najděte si stanici na přípravu serv (předem určená RBControl deska se správným SW), případně si na vlastní RBControl nahrajte nastavovací program.
1
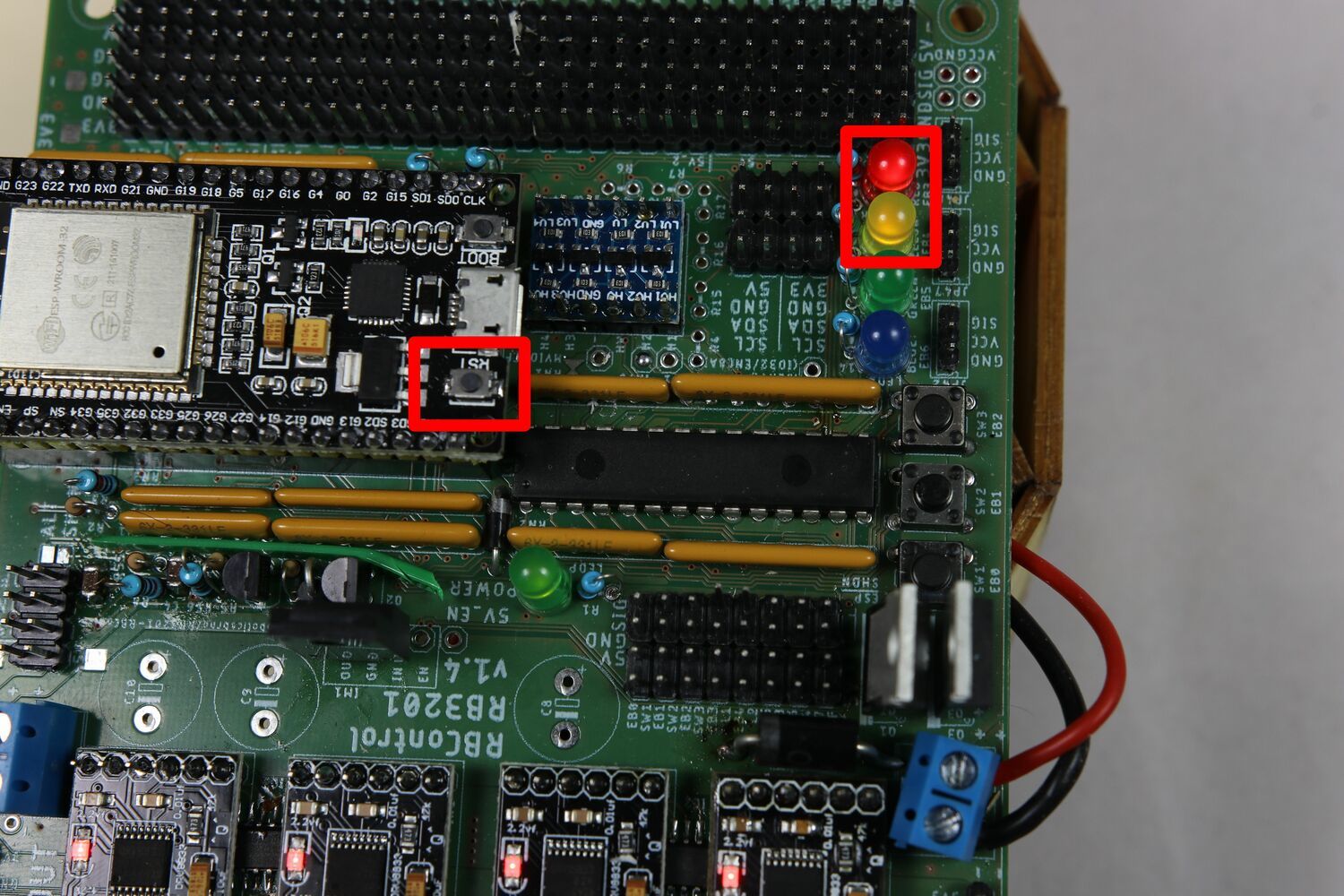
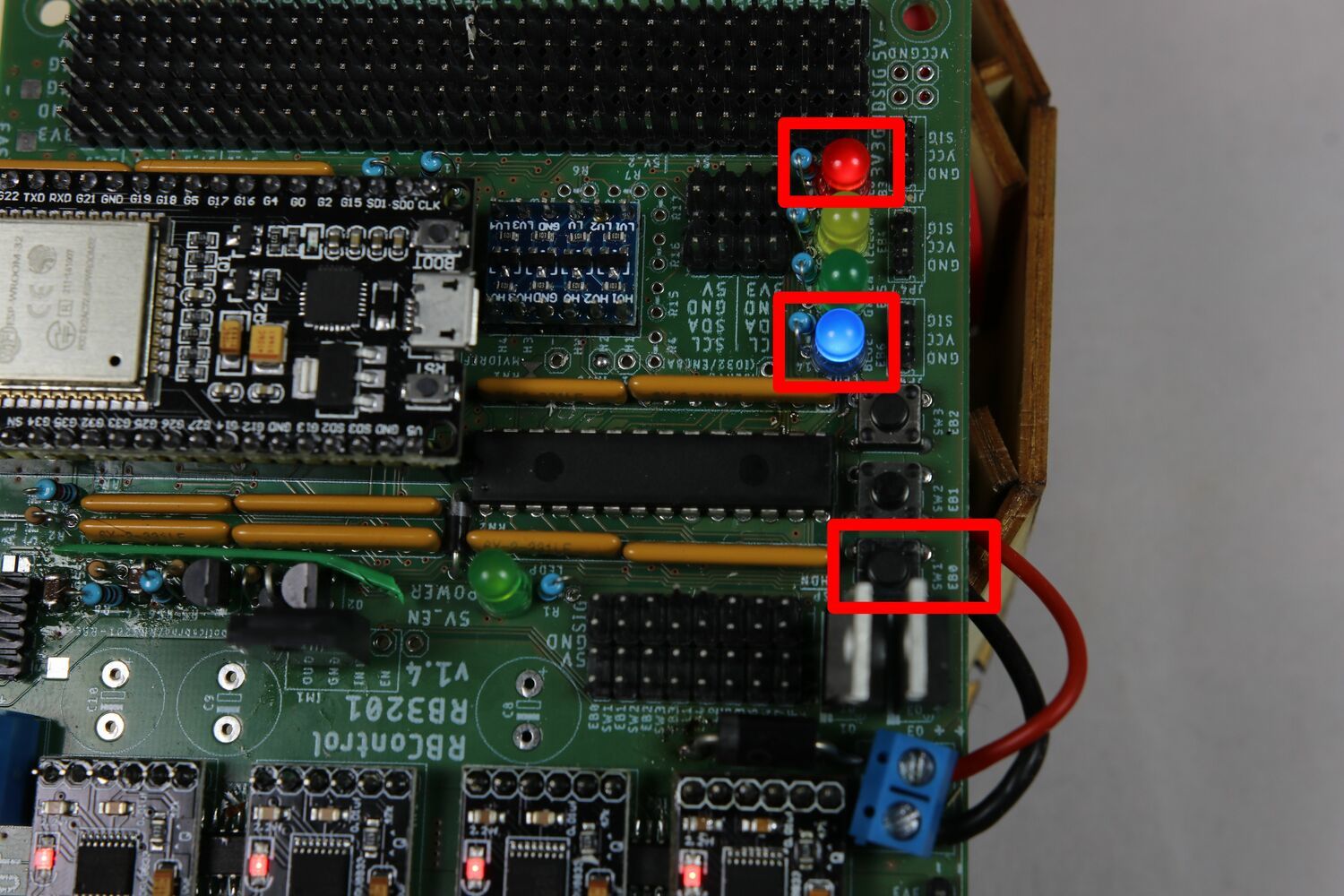
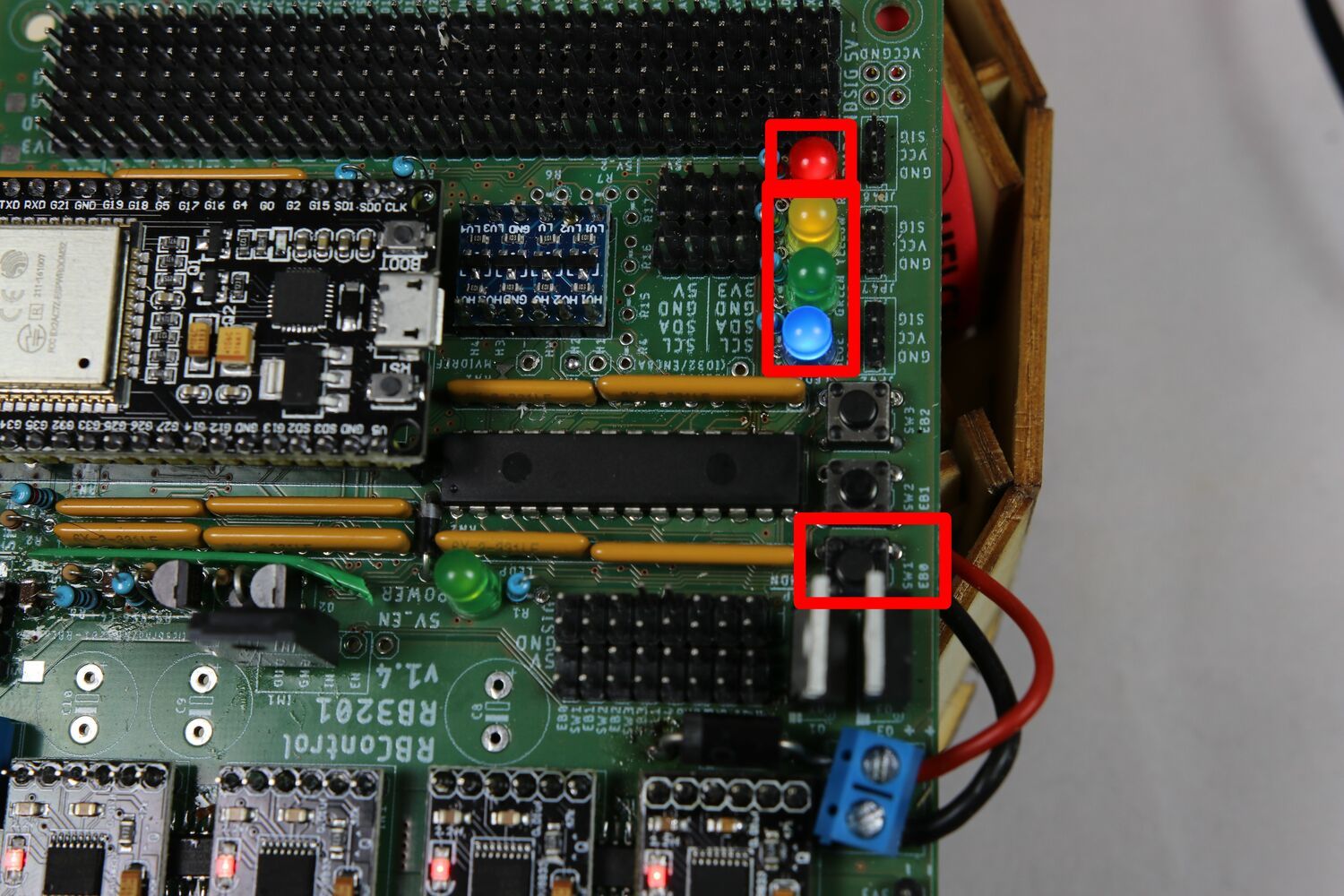
Uveďtě nastavovací desku do výchozího stavu. Žlutá LED musí svítit a červená LED musí blikat. Pokud tomu tak není, zkuste resetovat ESP32 pomocí RST tlačítka.
2
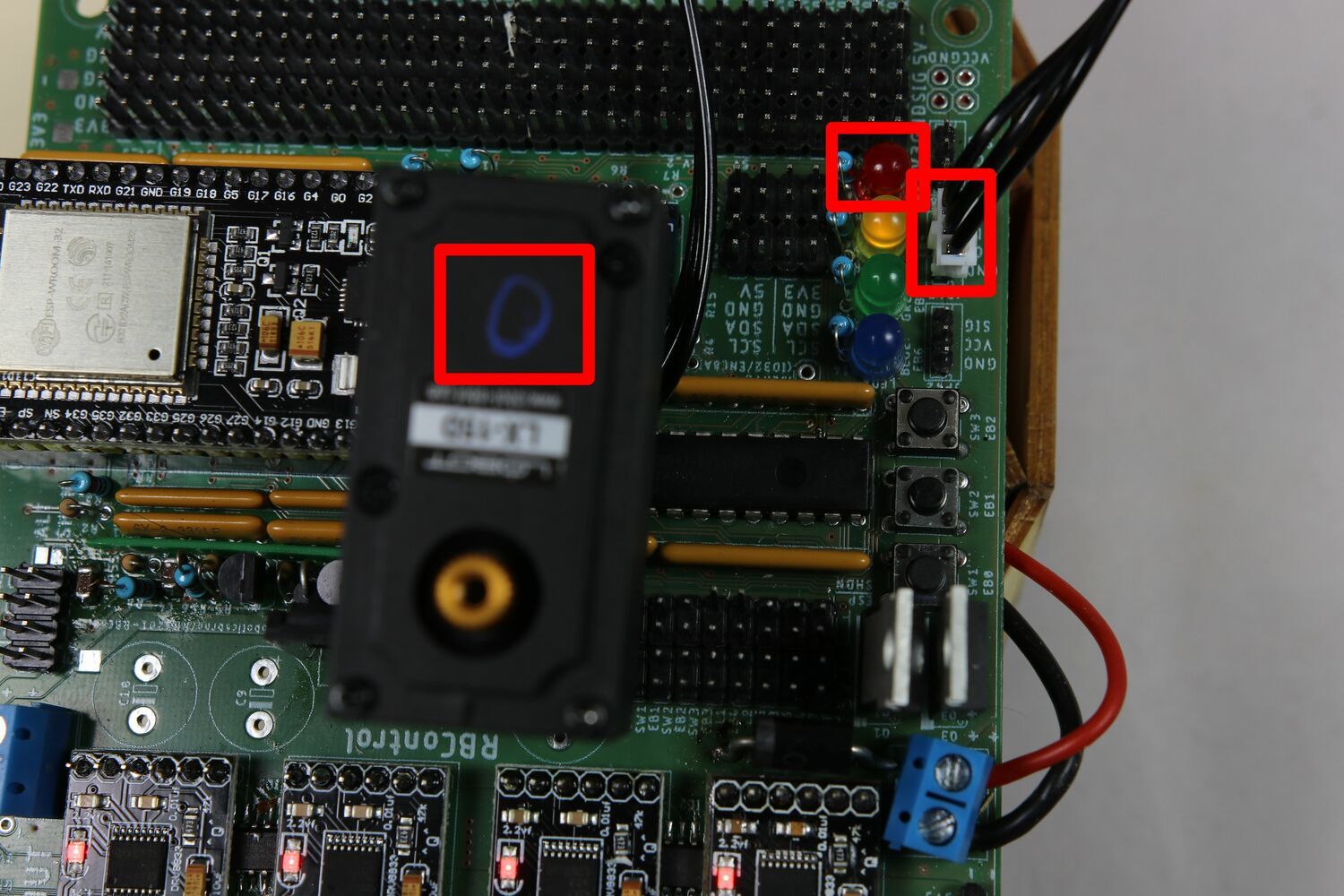
Připojte první servo (id 0). Červená LED musí zhasnout, poté je ID nastaveno. Pokud se to nestane, na sériové lince ESP32 je výpis chyb.
3
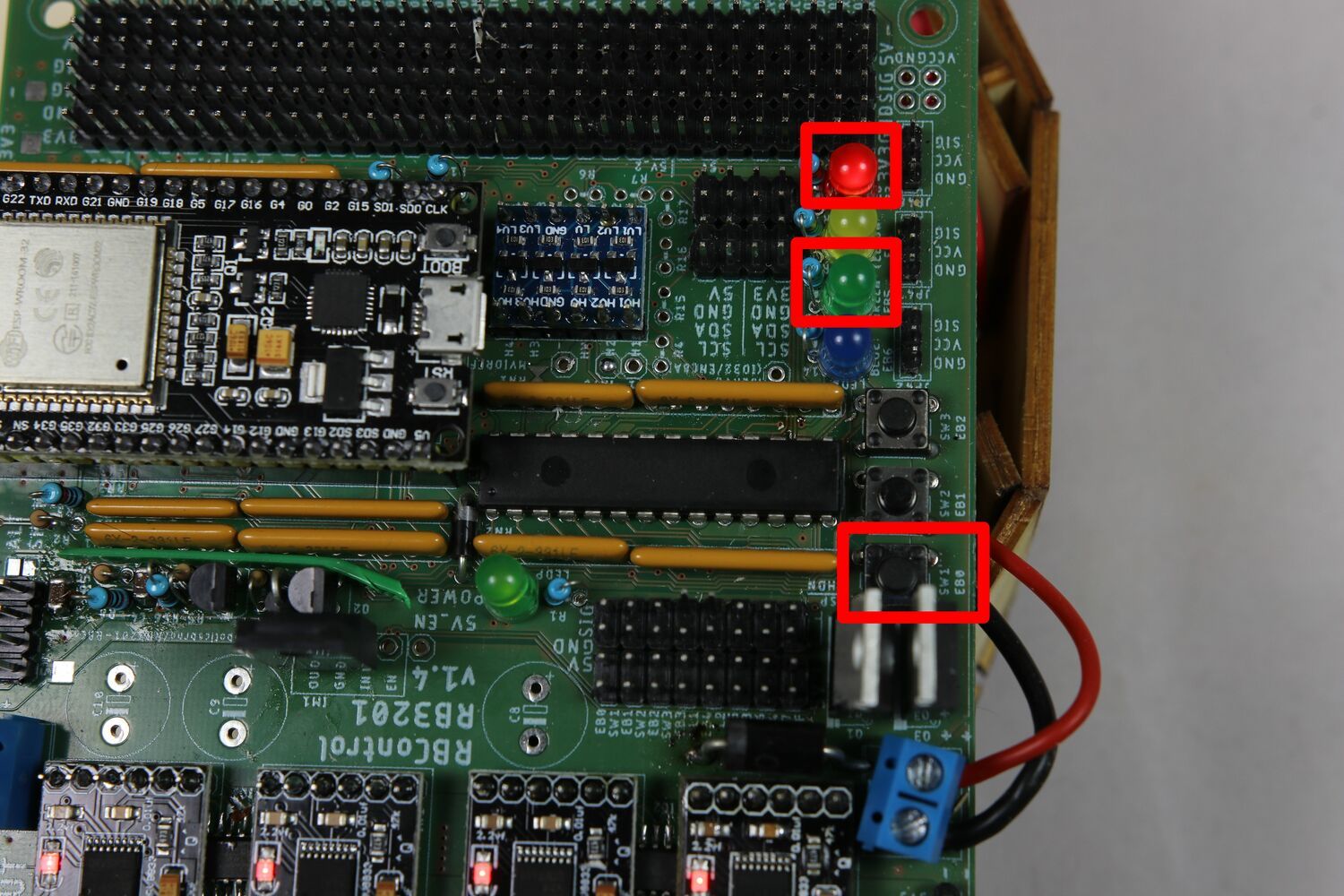
Odpojte servo a stiskněte tlačítko SW1. Musí zhasnout žlutá LED, rosvítít se zelená a červená musí blikat.

4
Připojte druhé servo (id 1). Červená LED musí zhasnout, poté je ID nastaveno. Pokud se to nestane, na sériové lince ESP32 je výpis chyb.
5
Odpojte servo a stiskněte tlačítko SW1. Musí zhasnout zelená LED, rosvítít se modrá a červená musí blikat.

6
Připojte třetí servo (id 2). Červená LED musí zhasnout, poté je ID nastaveno. Pokud se to nestane, na sériové lince ESP32 je výpis chyb.
7
Odpojte servo a stiskněte tlačítko SW1. Musí se rozsvítit žlutá, zelená a modrá LED a červená musí blikat.

8
Připojte všechna serva za sebe do řetězu, na pořadí nezáleží. Červená LED musí zhasnout, tím je celé zapojení ověřeno. Pokud se to nestane, na sériové lince ESP32 je výpis chyb.
Podvozek
Připravíme si pilník nebo brusný papír, ostrý nůž (ideálně skalpel) a lepidlo Herkules.
Paluba
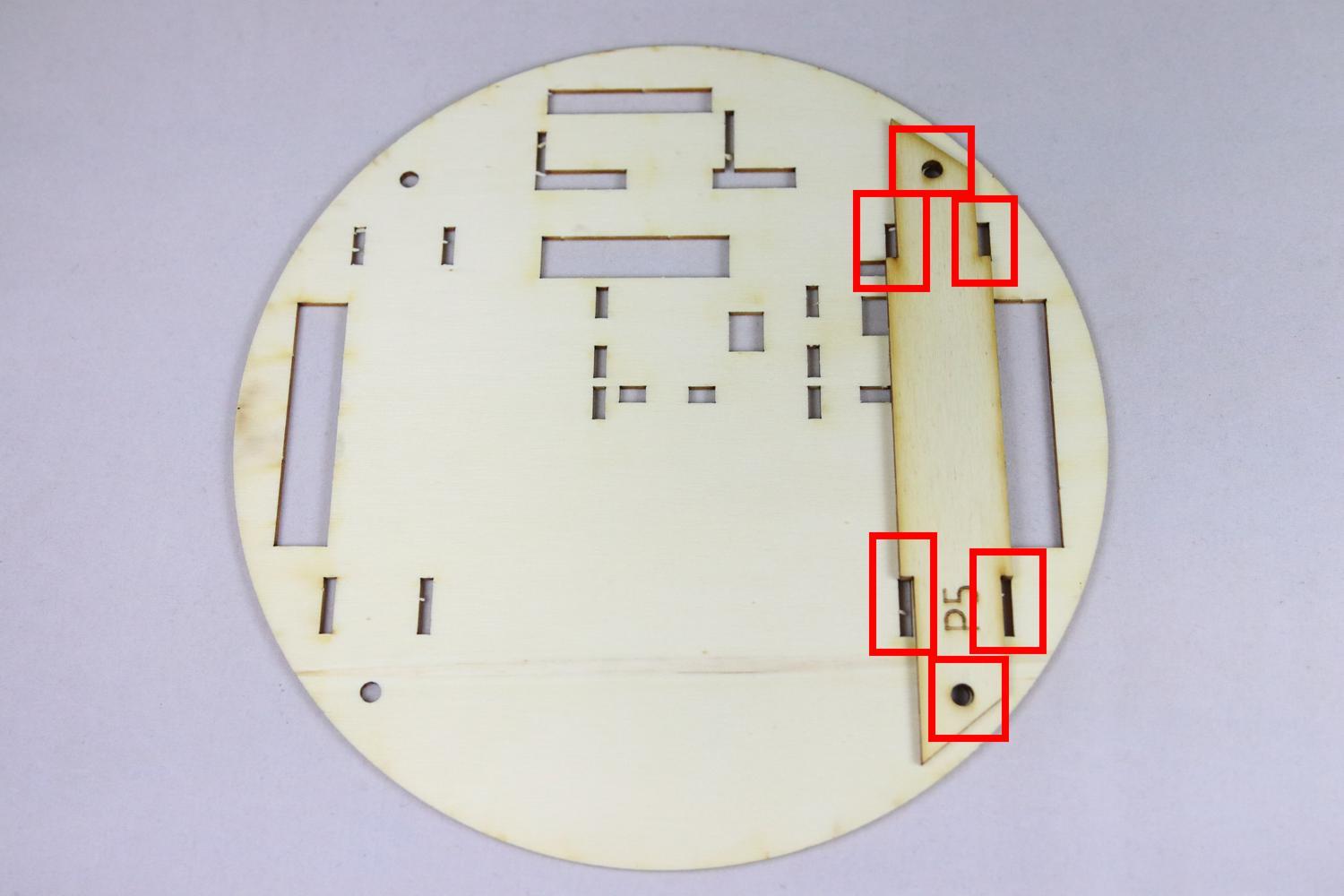
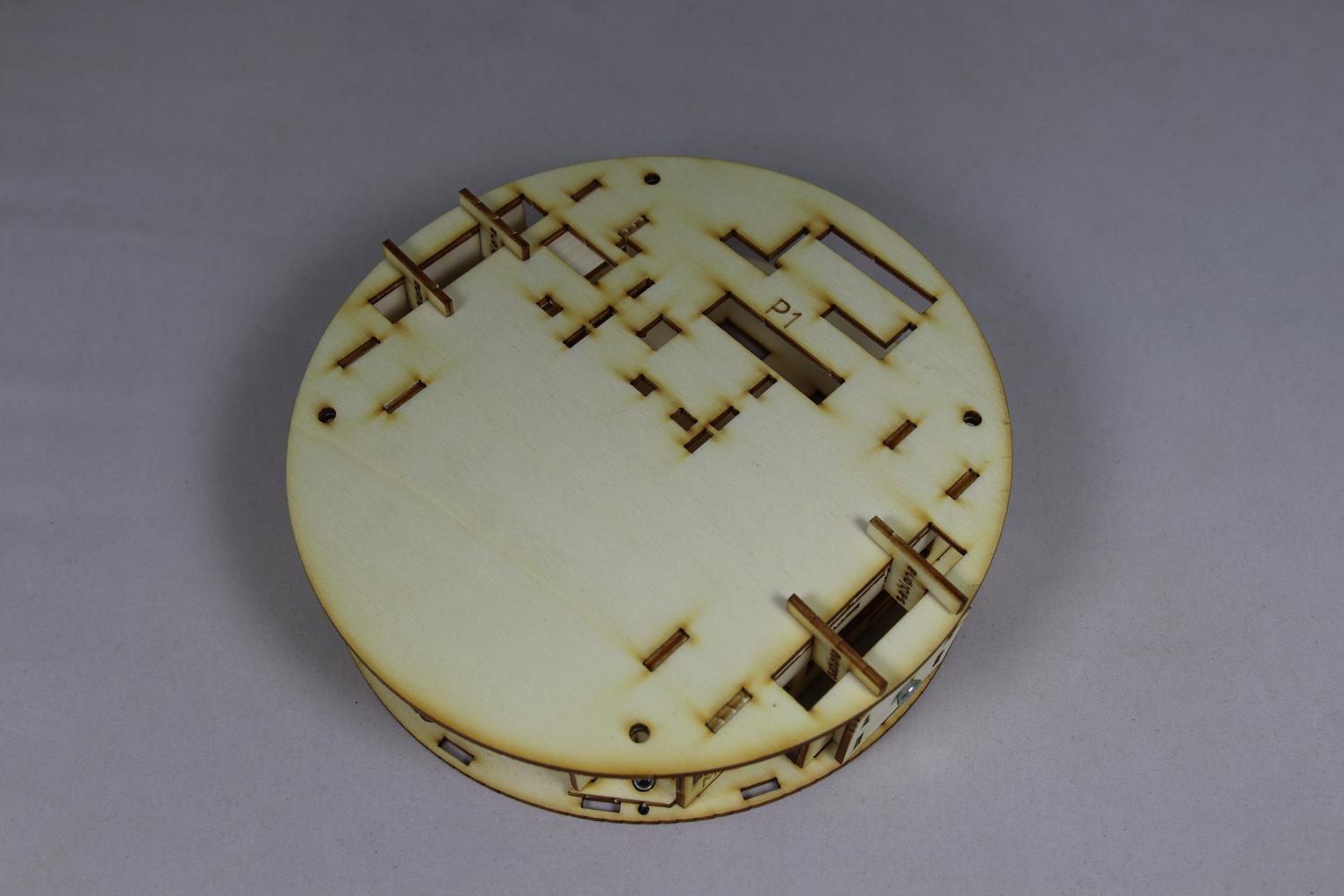
1
Připravte si díly P1 a P5. Na celou jednu plochu dílu P5 si naneste tenkou vrstvu lepidla a nalepte jej na nepopsanou stranu dílu P1. Otvory, které jsou na koncích, musí lícovat s těmi v palubě (díl P1). Před zaschnutím díl zapozicujeme podle dalšího kroku.
2
K přesnému zapozicování dílu poslouží díl P3 nebo P4, který si vložíte na jeho místo, ale nebudete ho lepit.
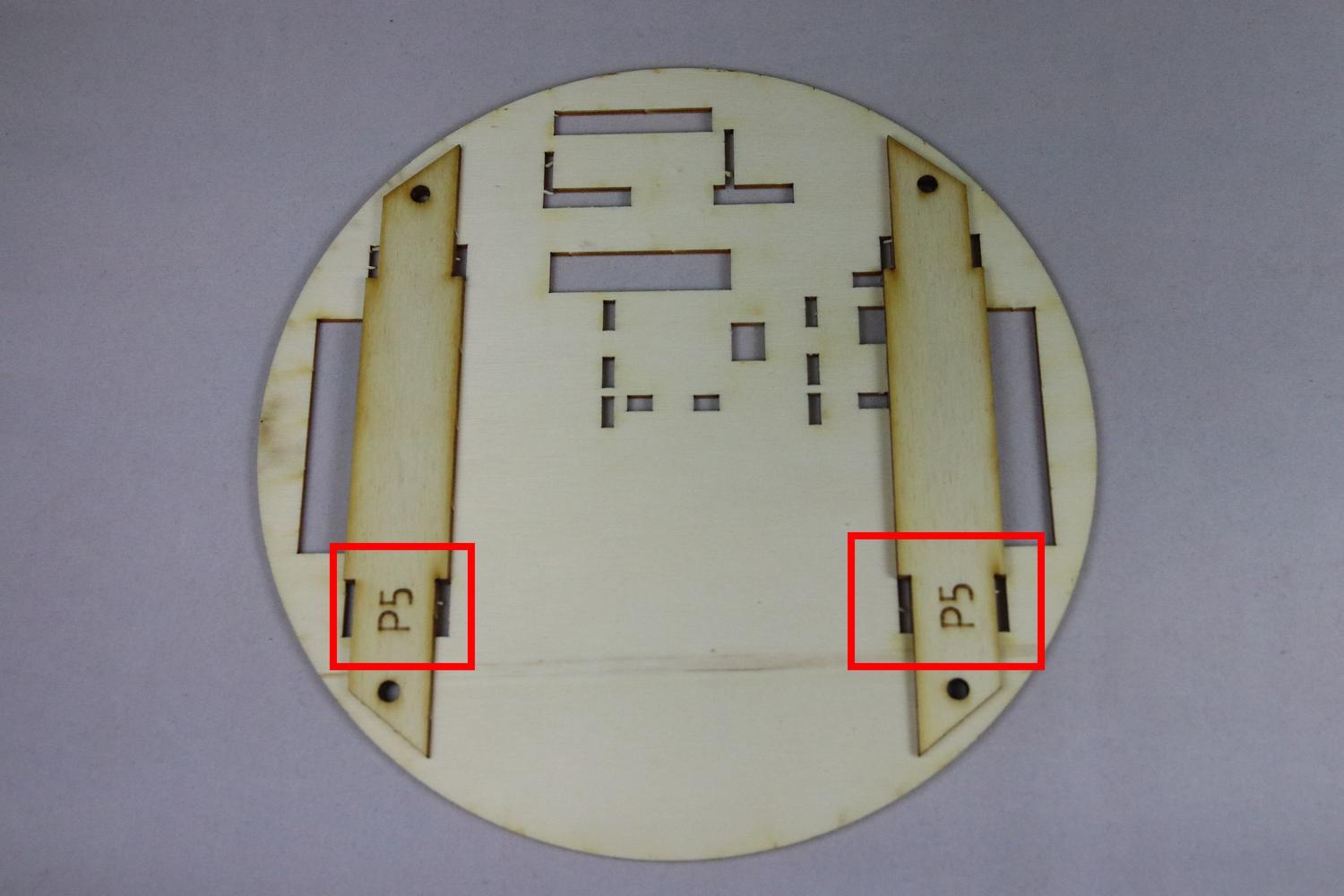
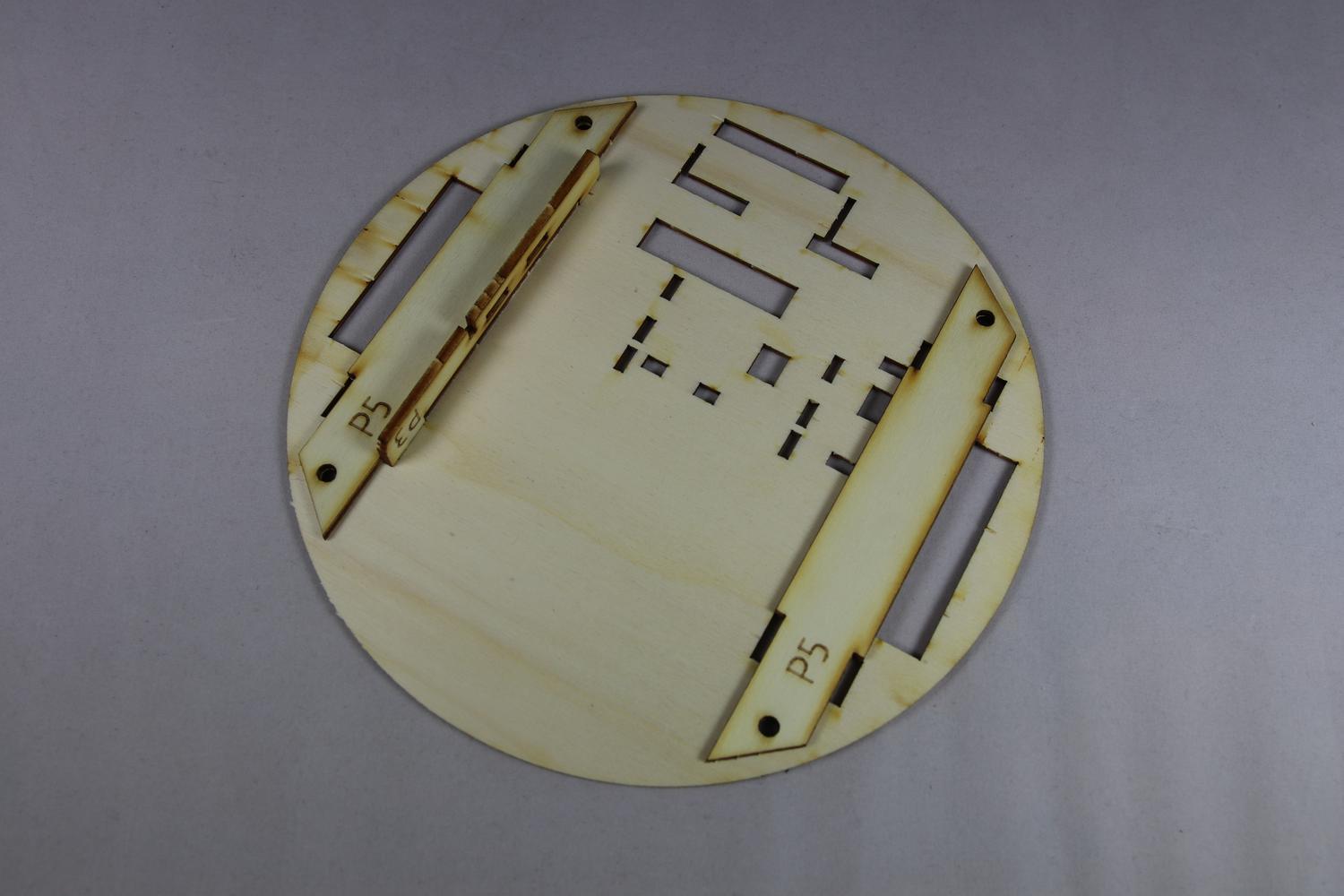
3
Výsledná podoba dílu P1 a P5.

4
Mezitím, co nám bude schnout díl P5, si slepíme díly P2, P3 a P4. Opět si dávejte pozor, abyste měli díly správně otočeny. Díly P3 a P4 musí být otočeny stejným směrem. Tento díl vyrobíme 2x.

5
Slepené oba díly.
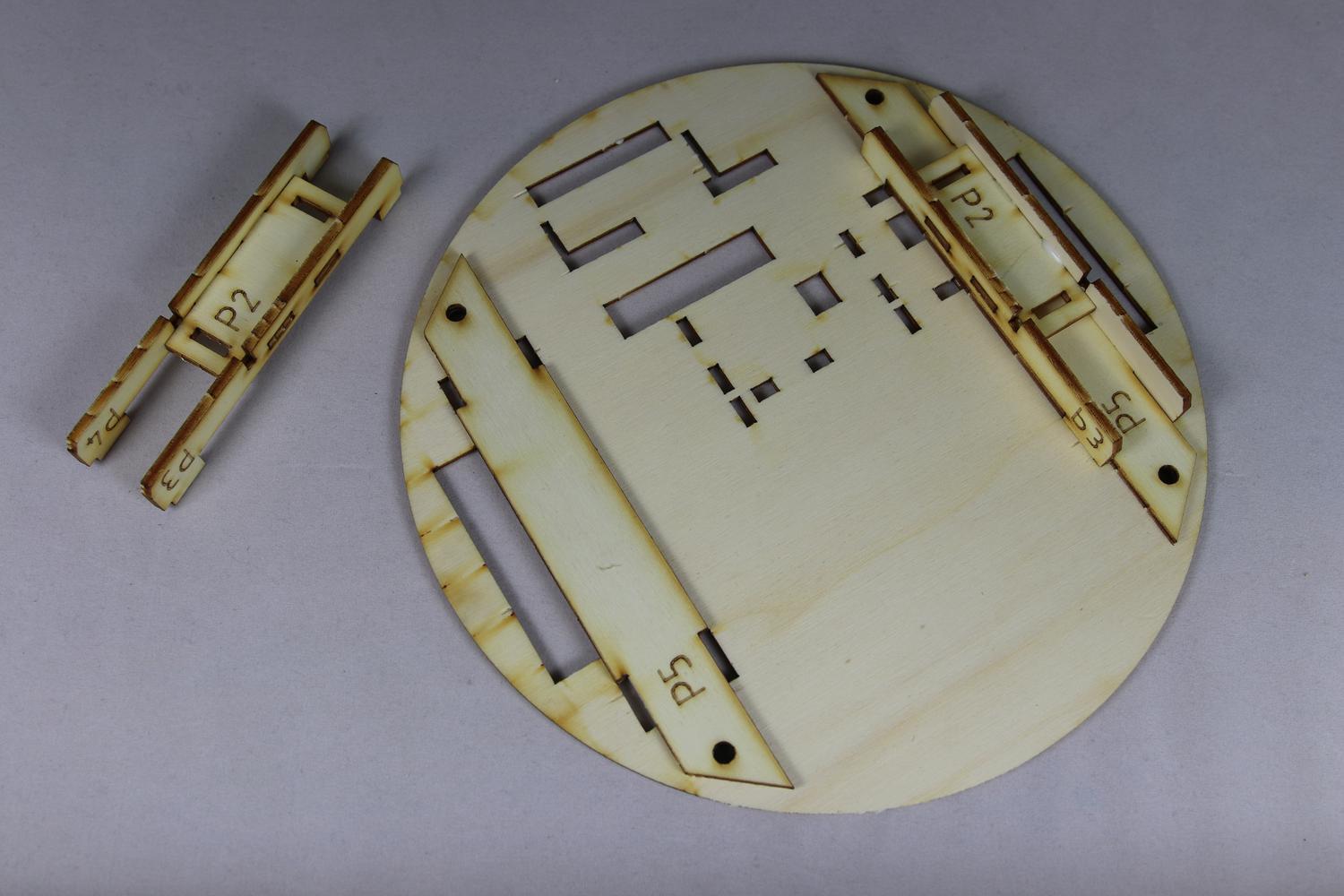
6
Když máme vše suché, nalepíme slepené díly P2, 3 a 4 kolem dílu P5 tak, jak je na obrázku.
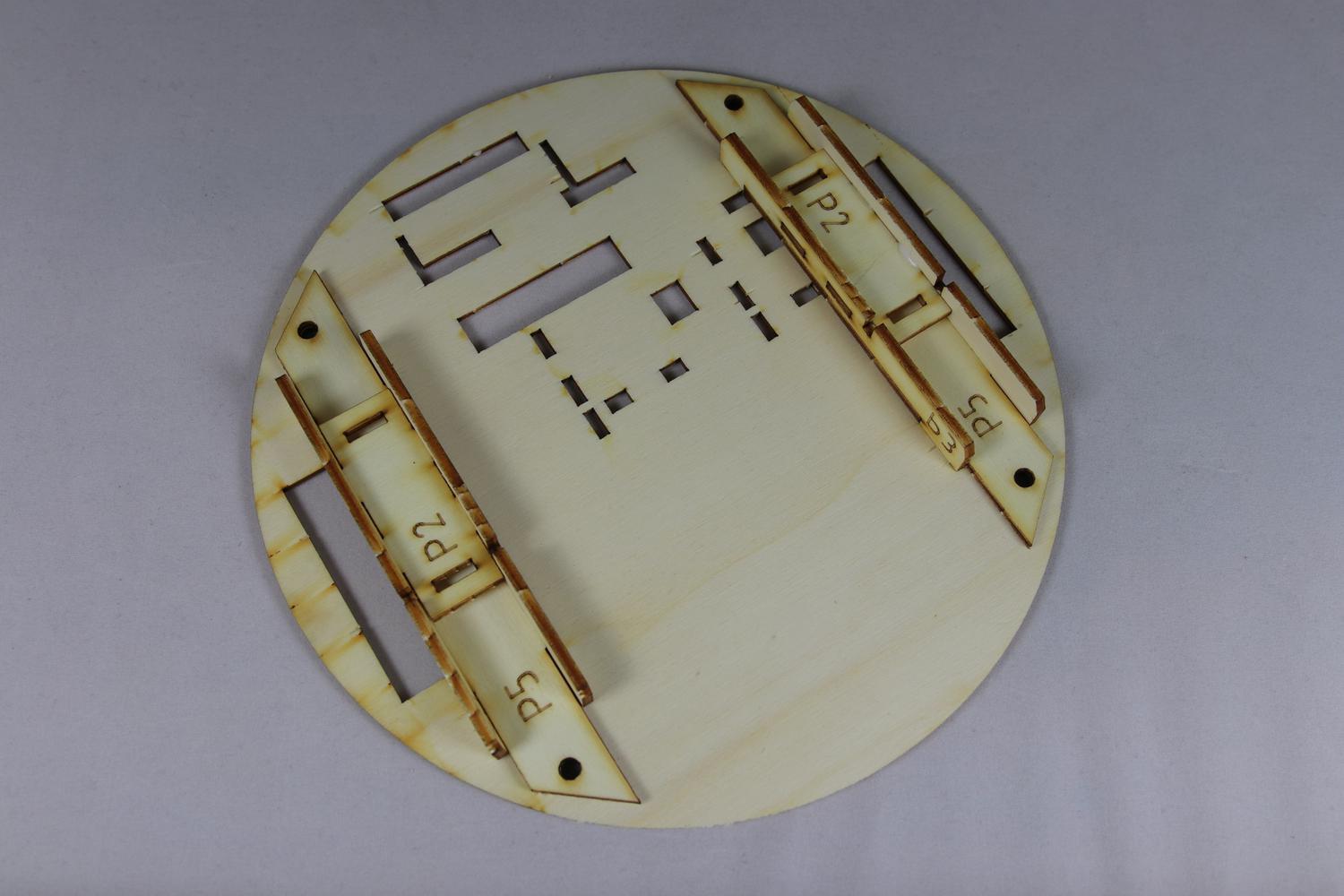
7
Zde vidíte oba díly vlepené v palubě.
Spodní díl podvozku
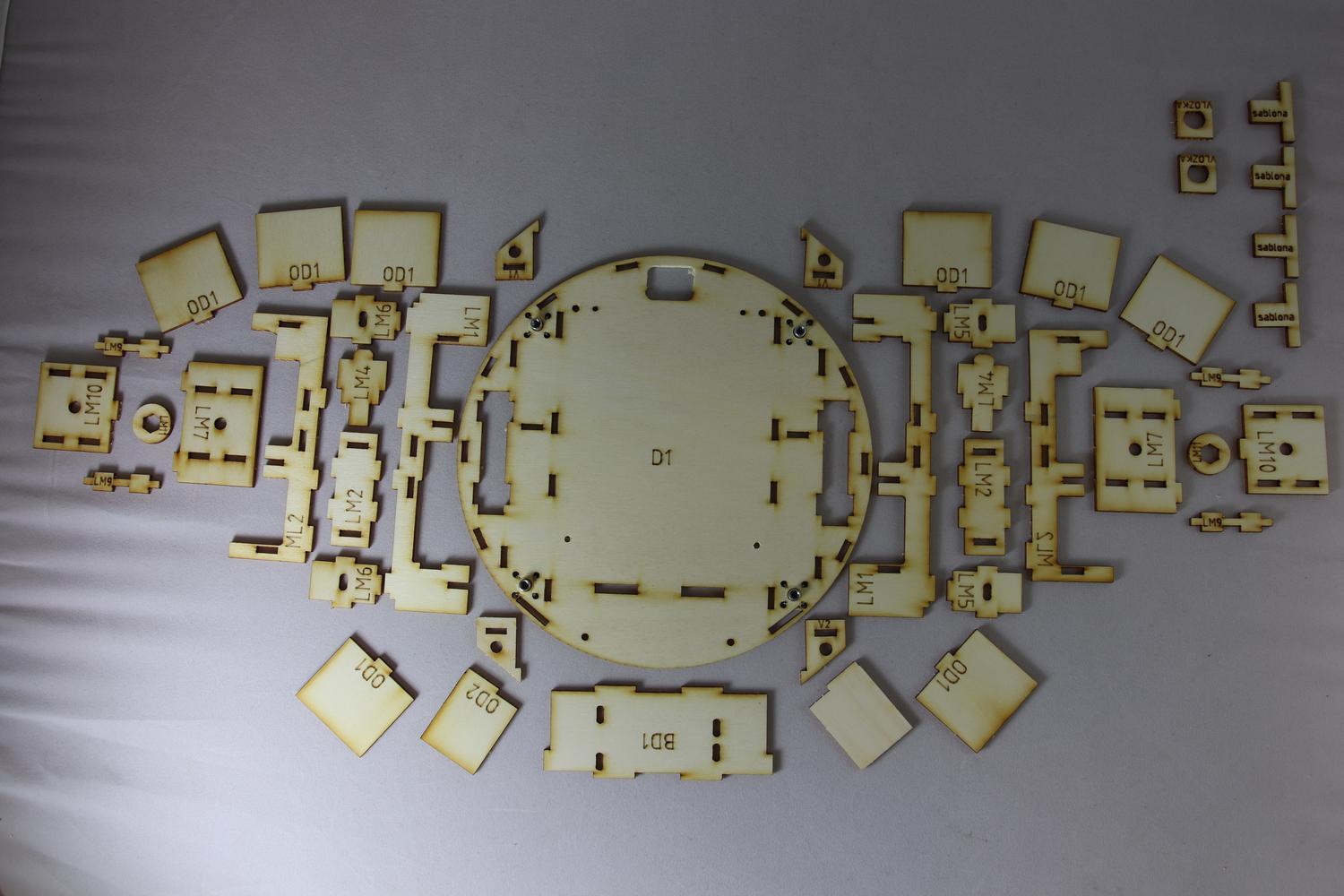
8
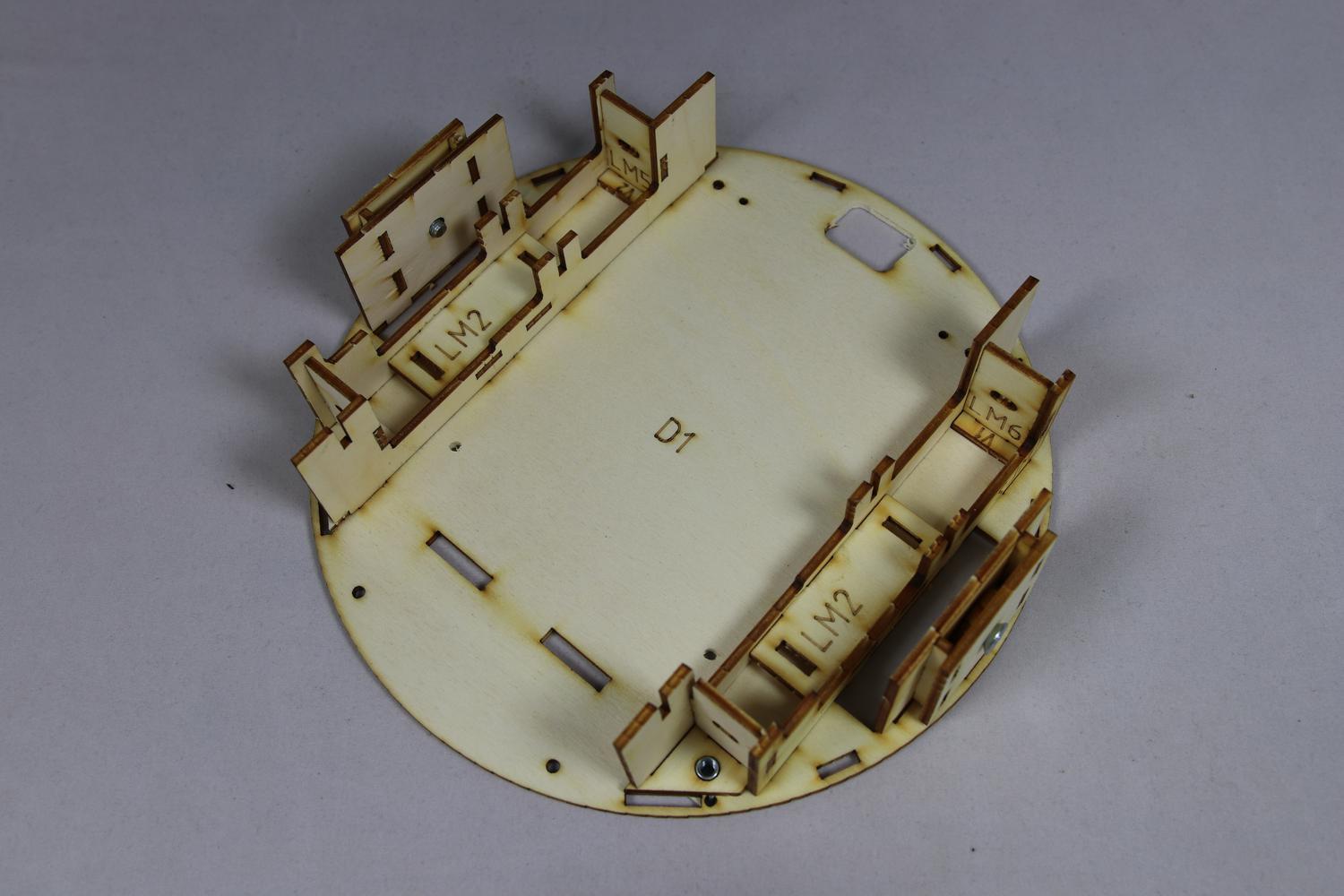
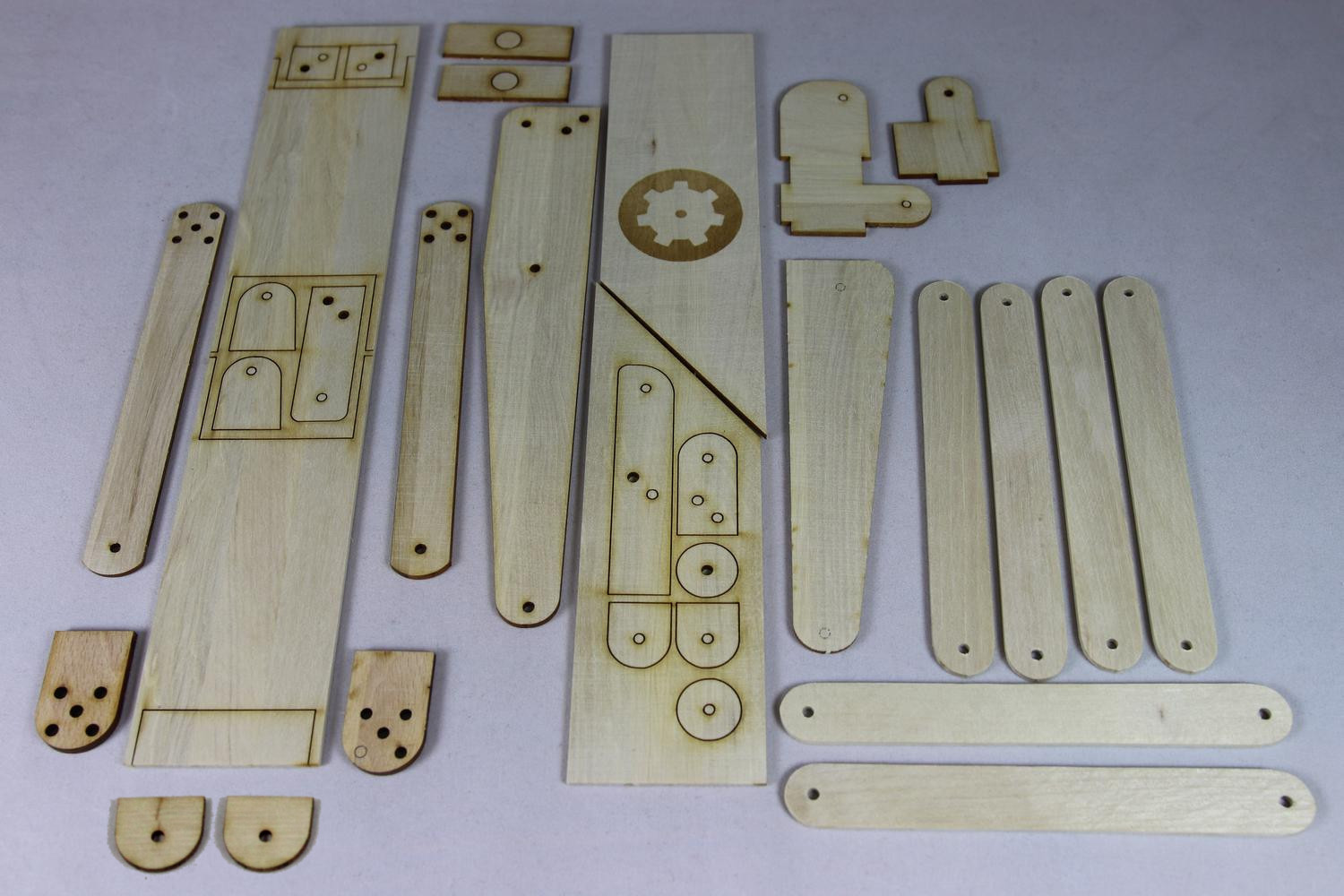
Vyloupeme díly z desek a poskládáme si je podle obrázku. Zabruste všechny otřepy a vady, které vznikly při vylamování dílů.
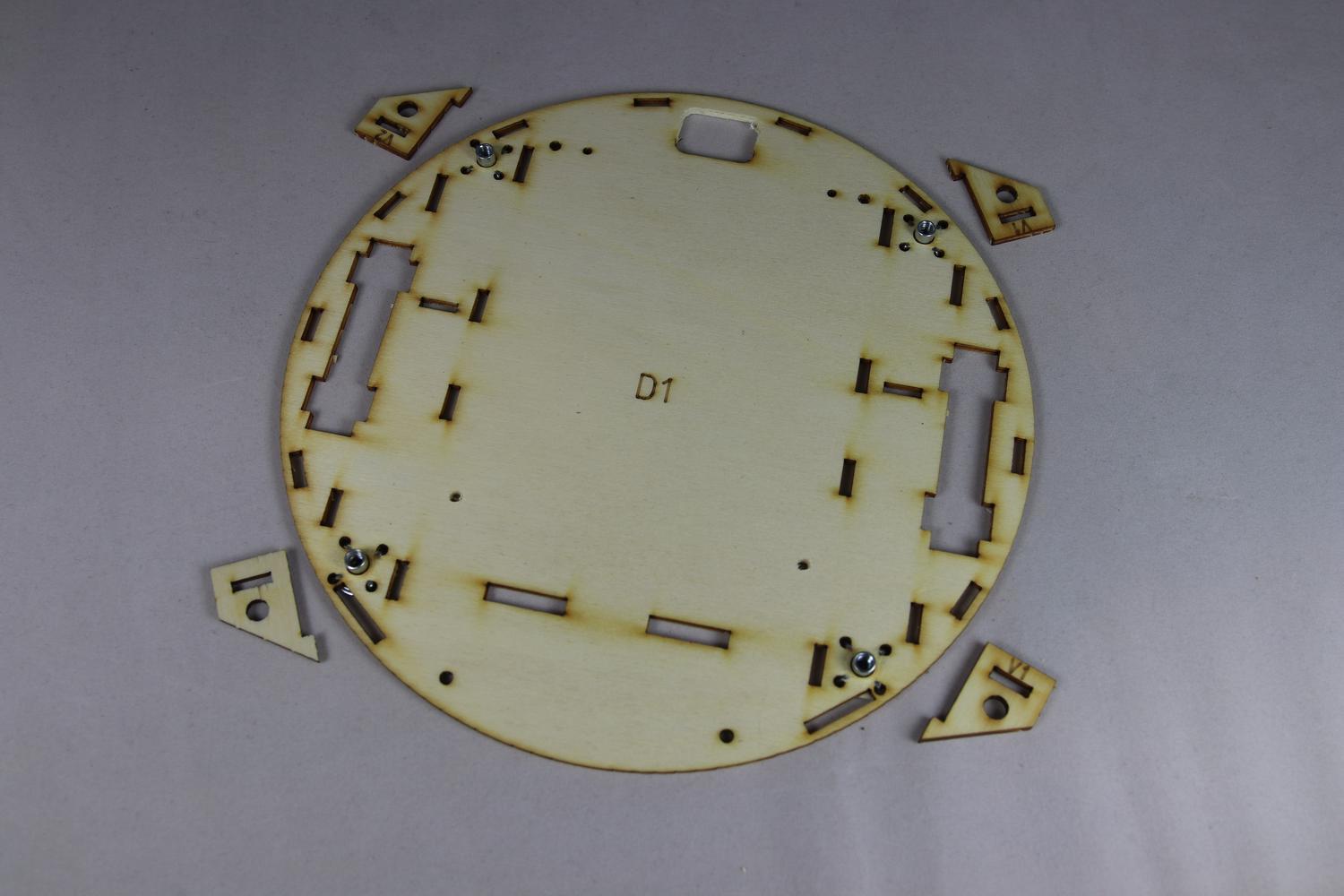
9
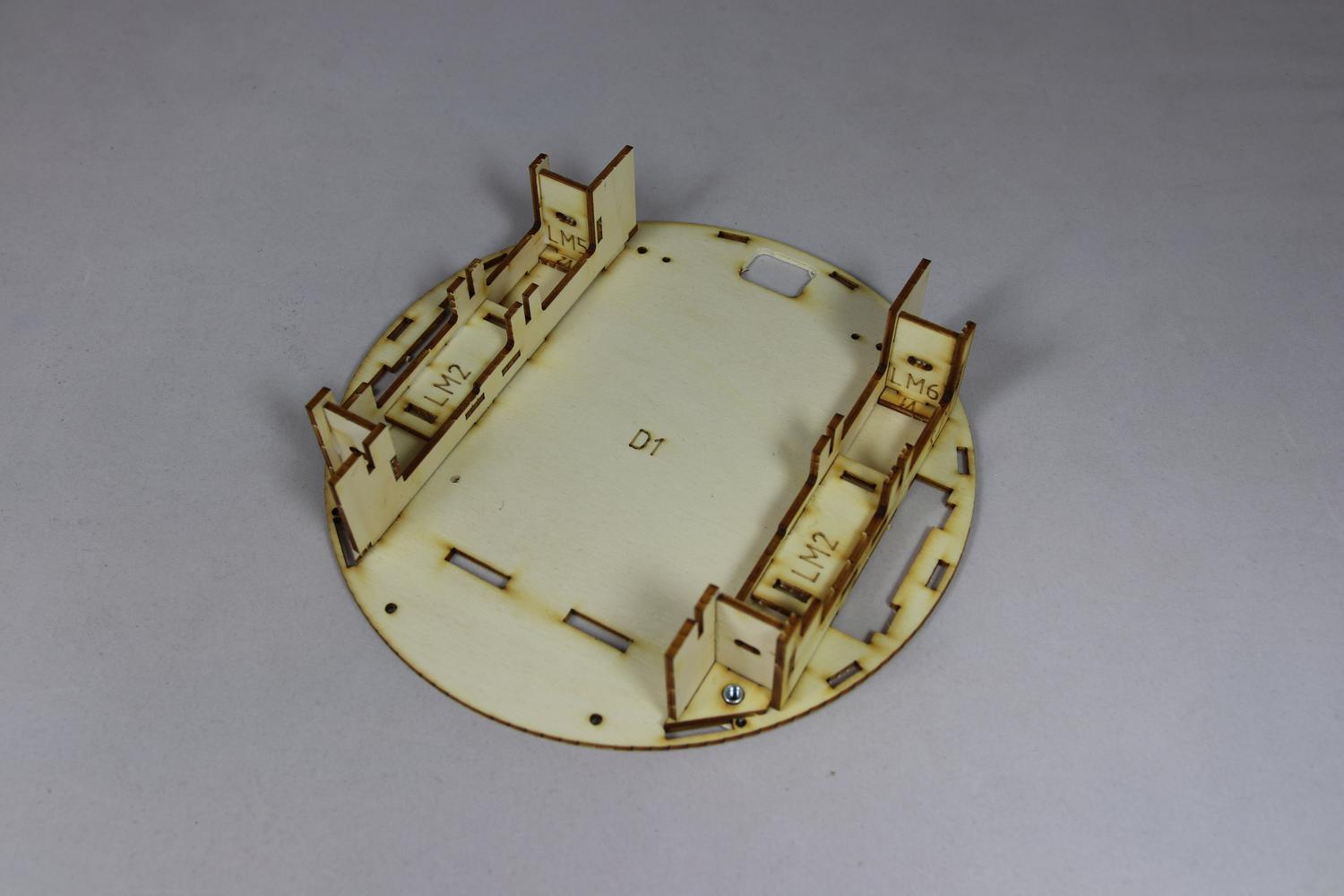
Teď si připravte díly V1, V2 a díl D1. Na díly V1 a V2 si naneste lepidlo a nalepte je na D1. Jako pomůcku ke správnému otočení použijte díl LM1, který nelepte, jen si ho zastrčte na místo. Po zapozicování si každý díl stáhněte svorkou.
10
Zapozicování pro lepení dílů V1 a V2 s pomocným dílem LM1.
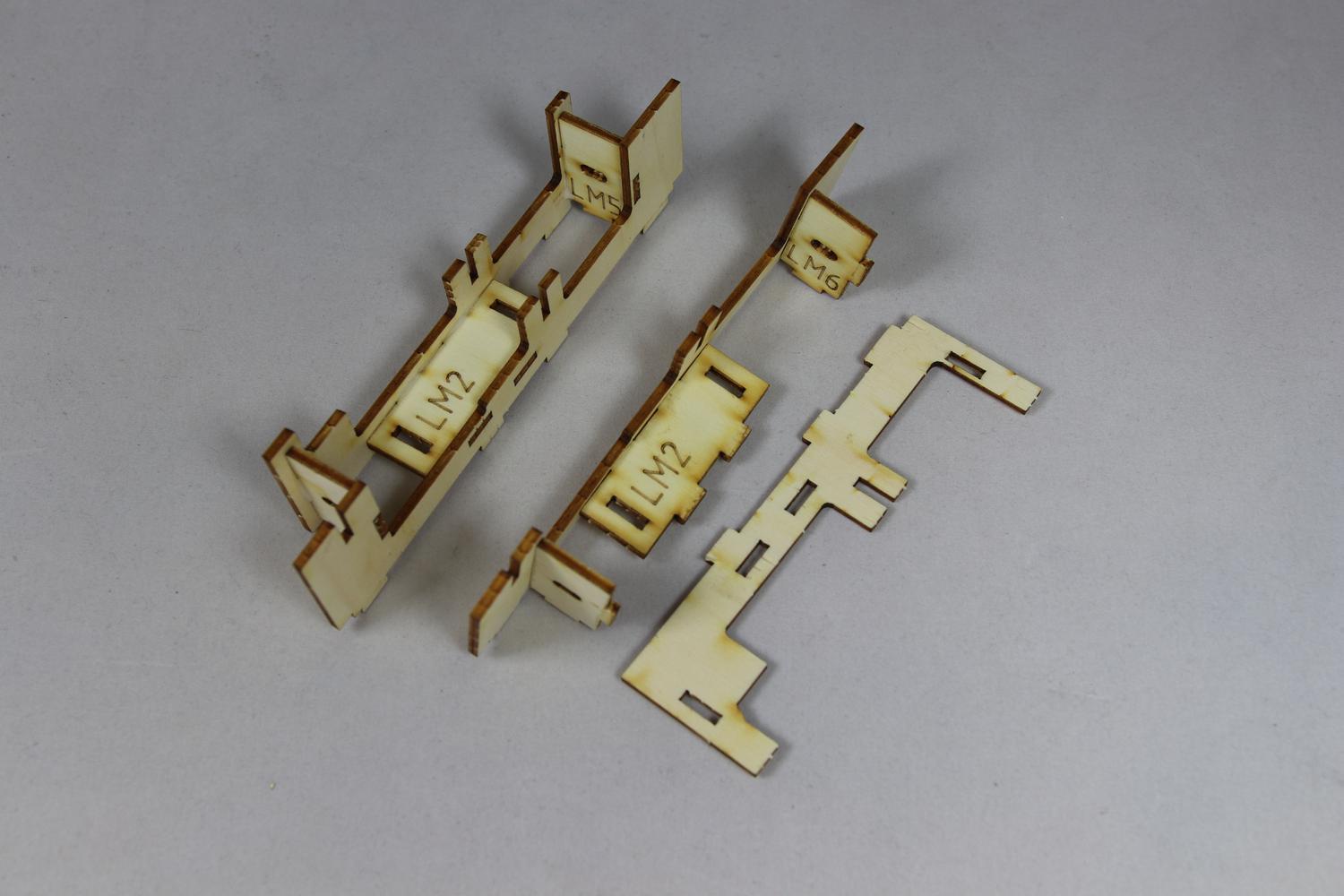
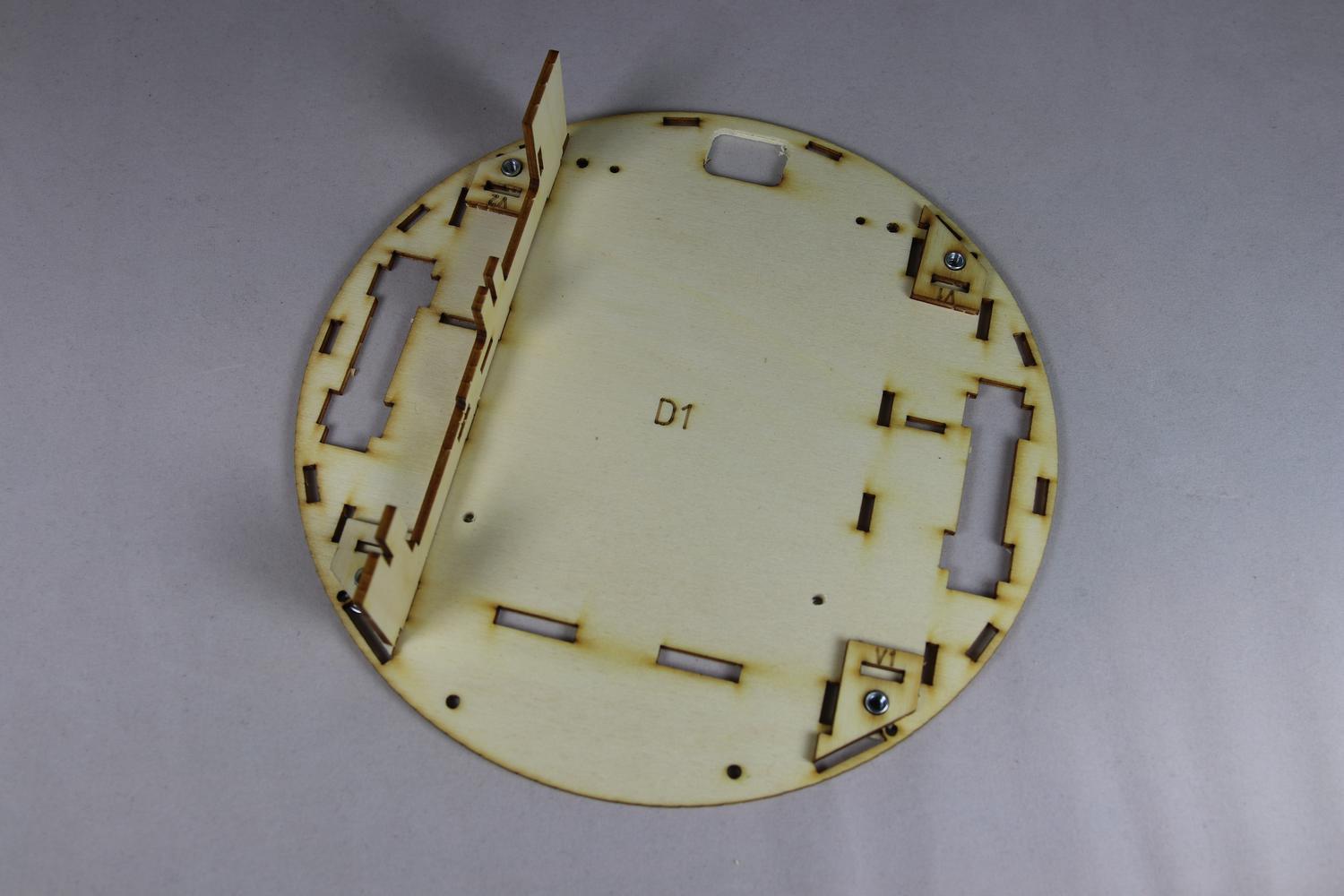
11
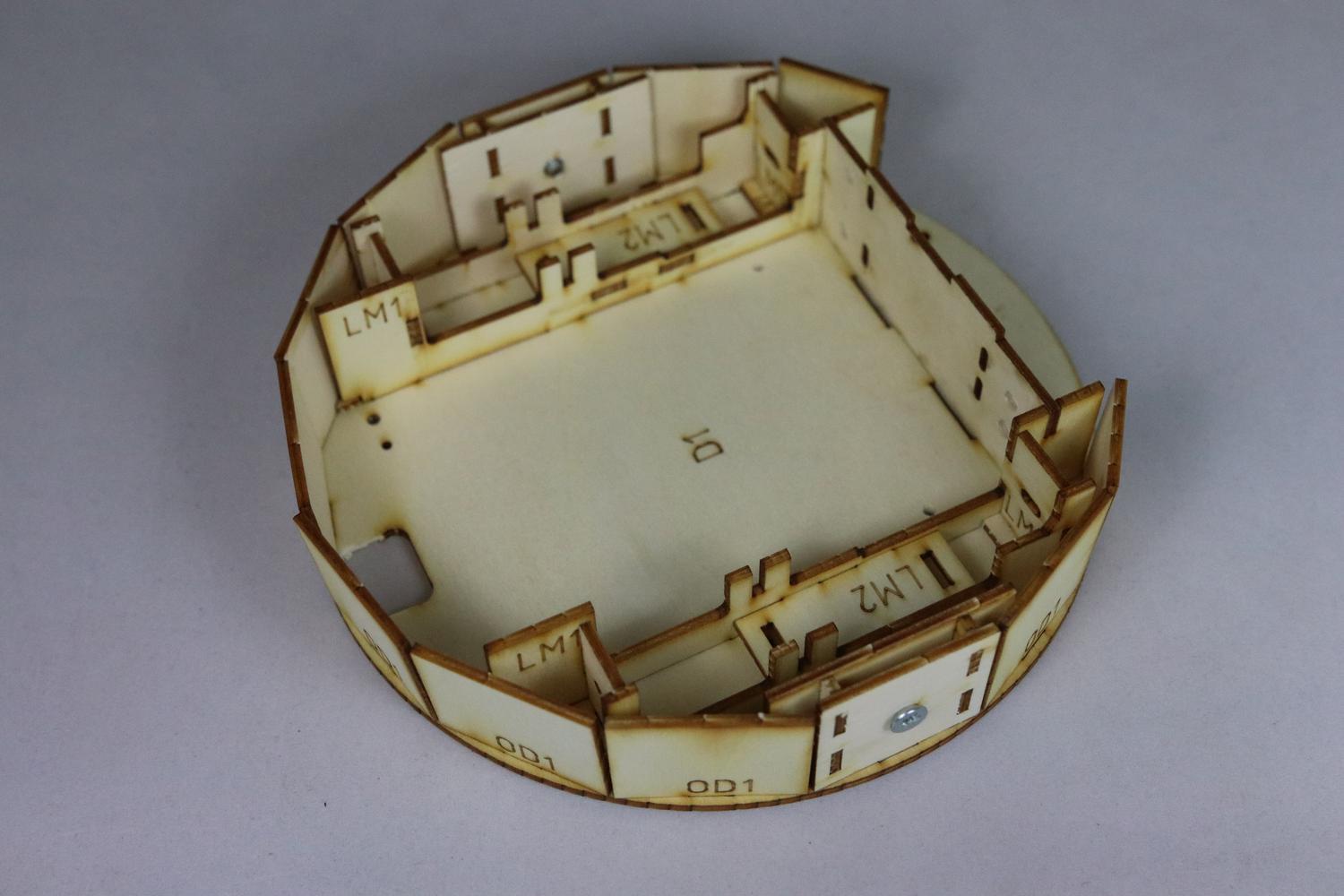
Nachystejte si díly LM1, ML2, LM2, LM5 a LM6 a slepte je dle obrázku. To stejné udělejte ještě jednou, ale tentokrát zrcadlově, aby bylo toto motorové lože na pravou stranu i na levou stranu.
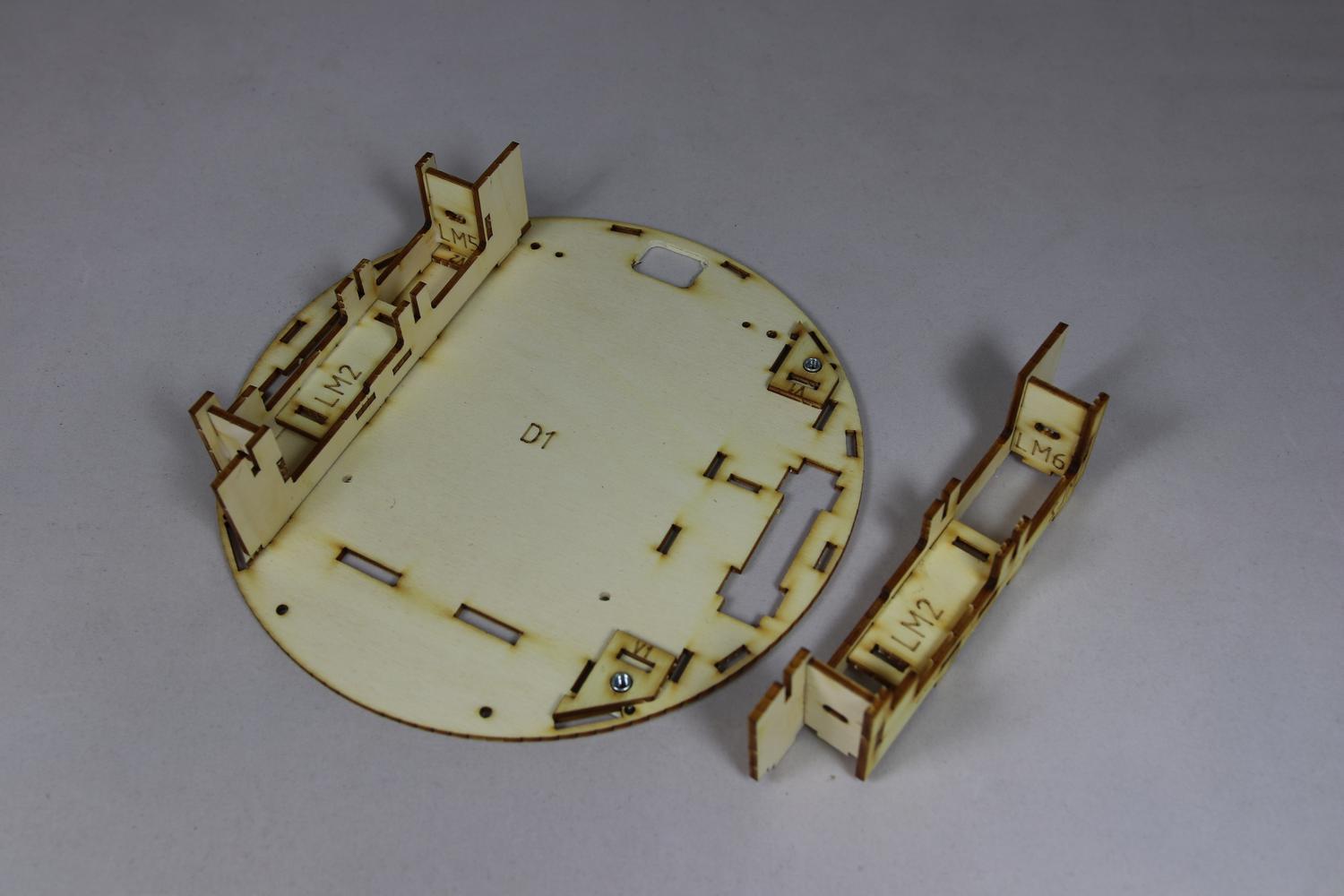
12
Lože pro motor vlepte do paluby.
13
Výsledná podoba lože pro motor.

14
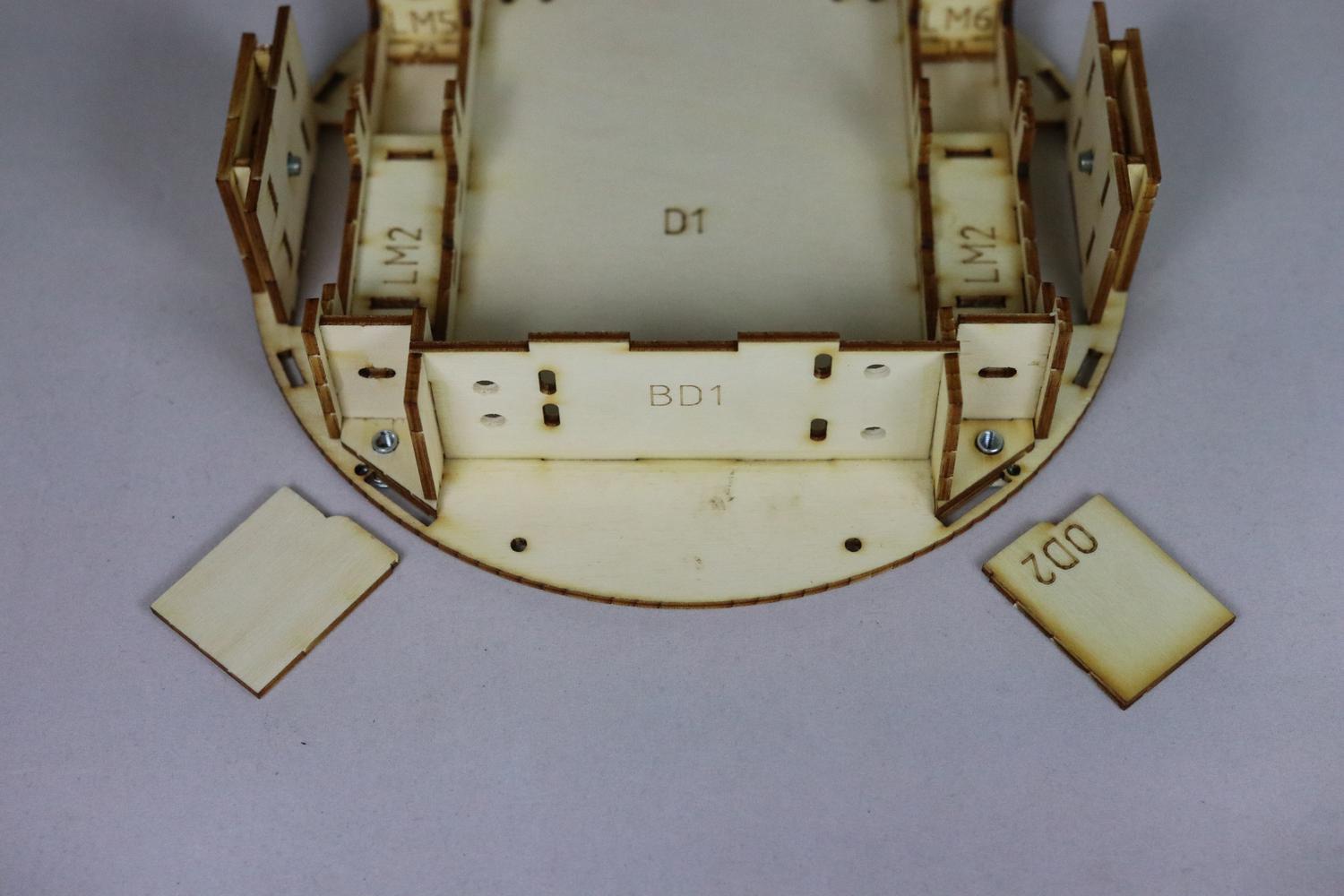
Po zaschnutí odklopte palubu. Najděte si díl BD1 a nalepte si jej do zadní části podvozku. Je třeba díl natlačit co nejvíc ven z robota.
15
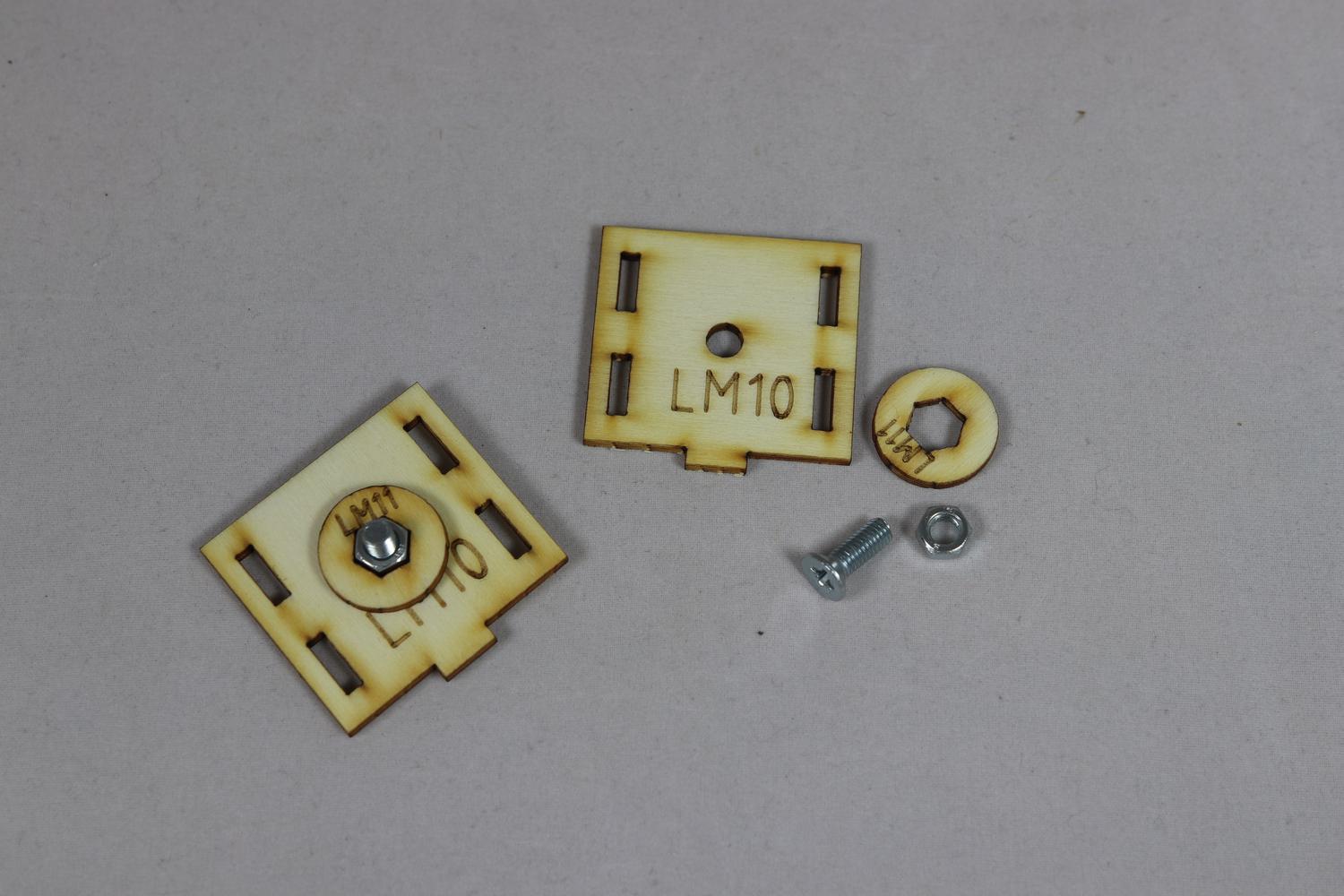
Nachystejte si díly LM7, LM9, LM10, LM11 a šroub s matkou M5. Do dílu LM10 vložte šroub a z druhé strany dotáhněte matici. Následně si vezměte díl LM11 a nalepte jej kolem matice, aby se matka nemohla točit. Tento díl vyrobte 2x.
16
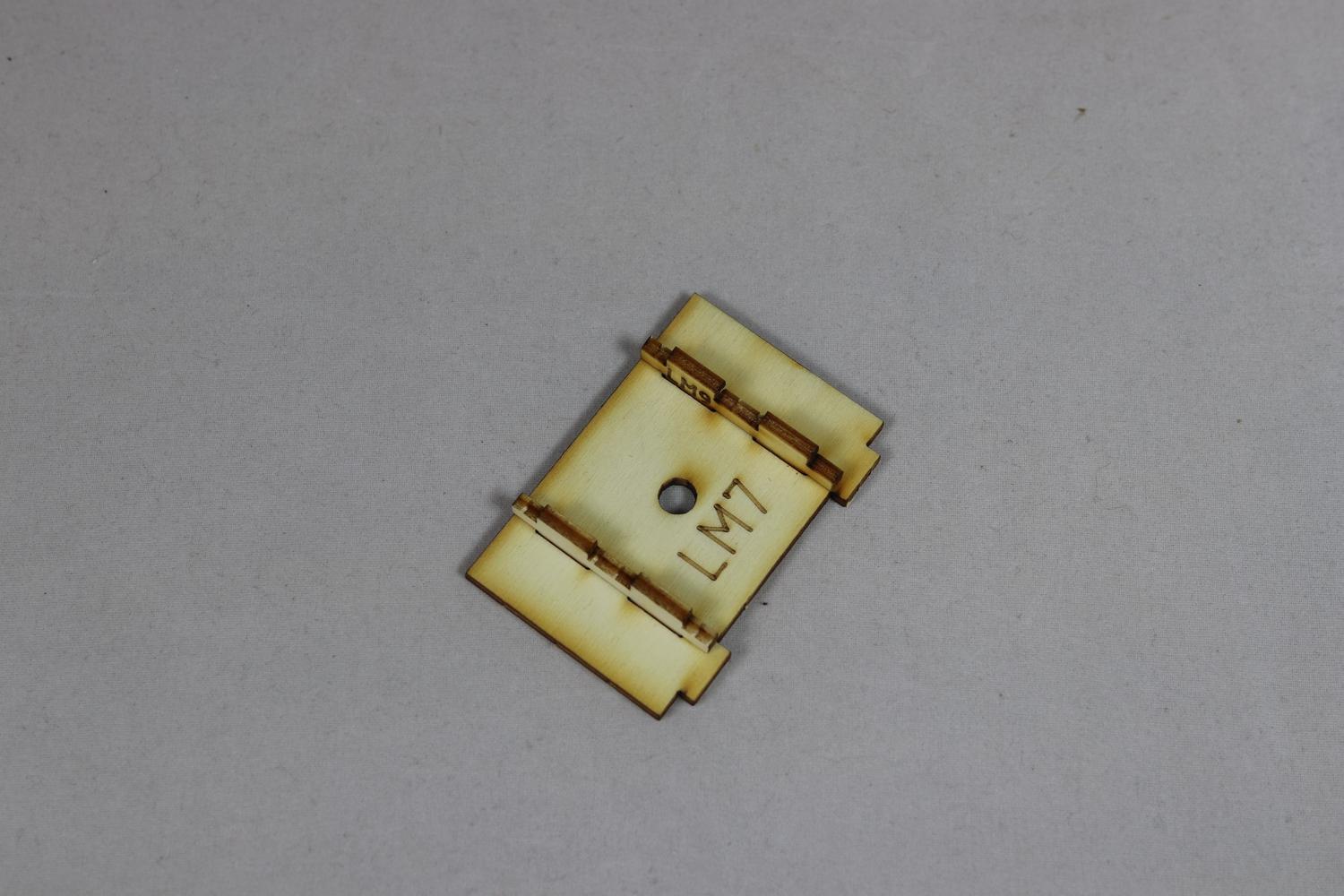
Nyní vlepte do dílu LM7 díly LM9. Tento díl vyrobte 2x.
17
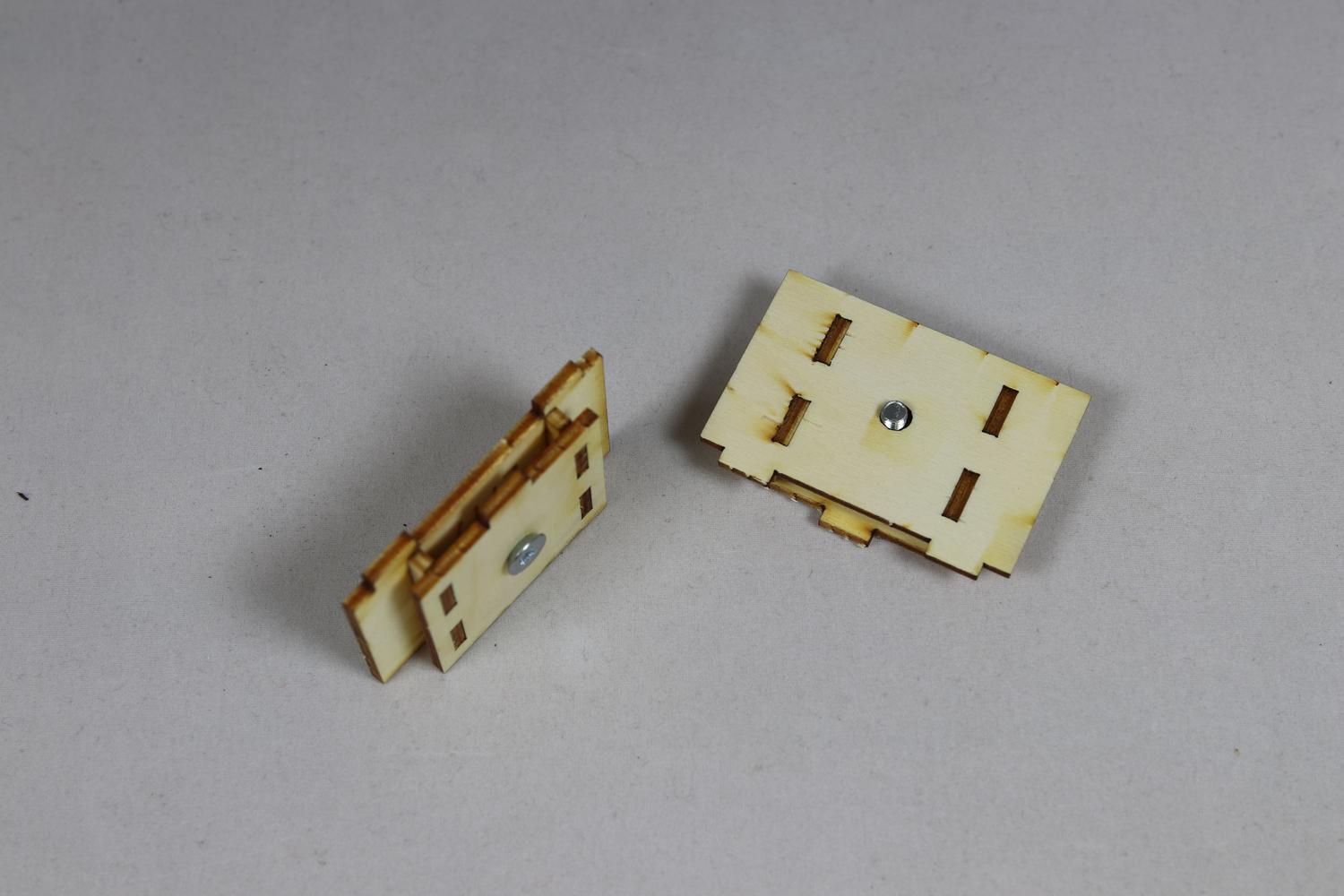
Předchozí 2 části slepte k sobě dle obrázku. Zopakujte pro druhou sadu dílů. Budete mít 2 výsledné díly jako na obrázku.

18
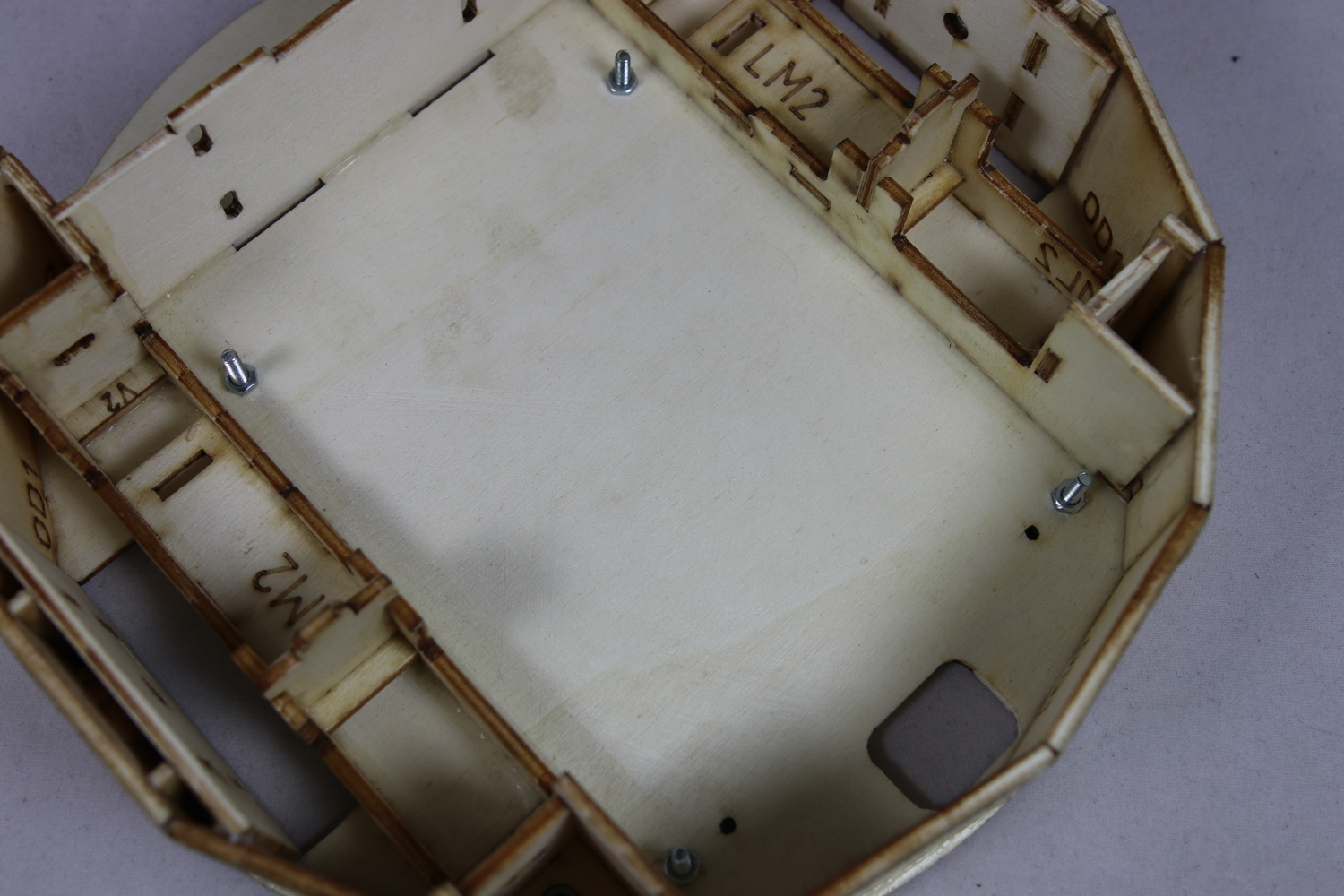
Když je vše suché, nalepte díl s maticí do dna, jak je na obrázku.
19
Oba díly s maticí na správné pozici. Před zaschnutím lepidla následuje další krok.
20
Přiklopte palubou. Zevnitř podepřete dílkem s názvem ‘Šablona’, aby se díl nebortil do středu robota.
21
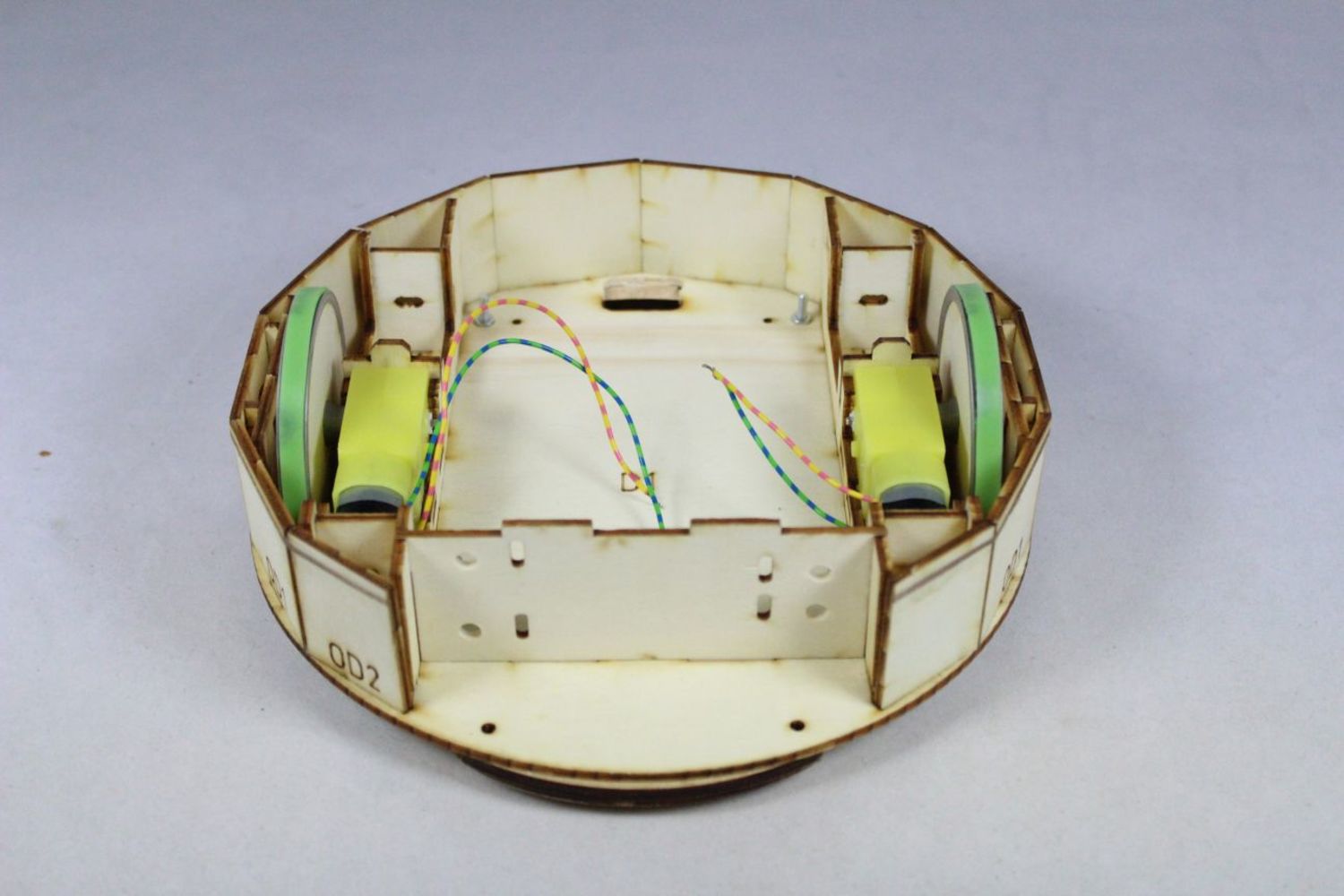
Po zaschnutí odmontujte horní palubu a nachystejte si díly OD2.
22
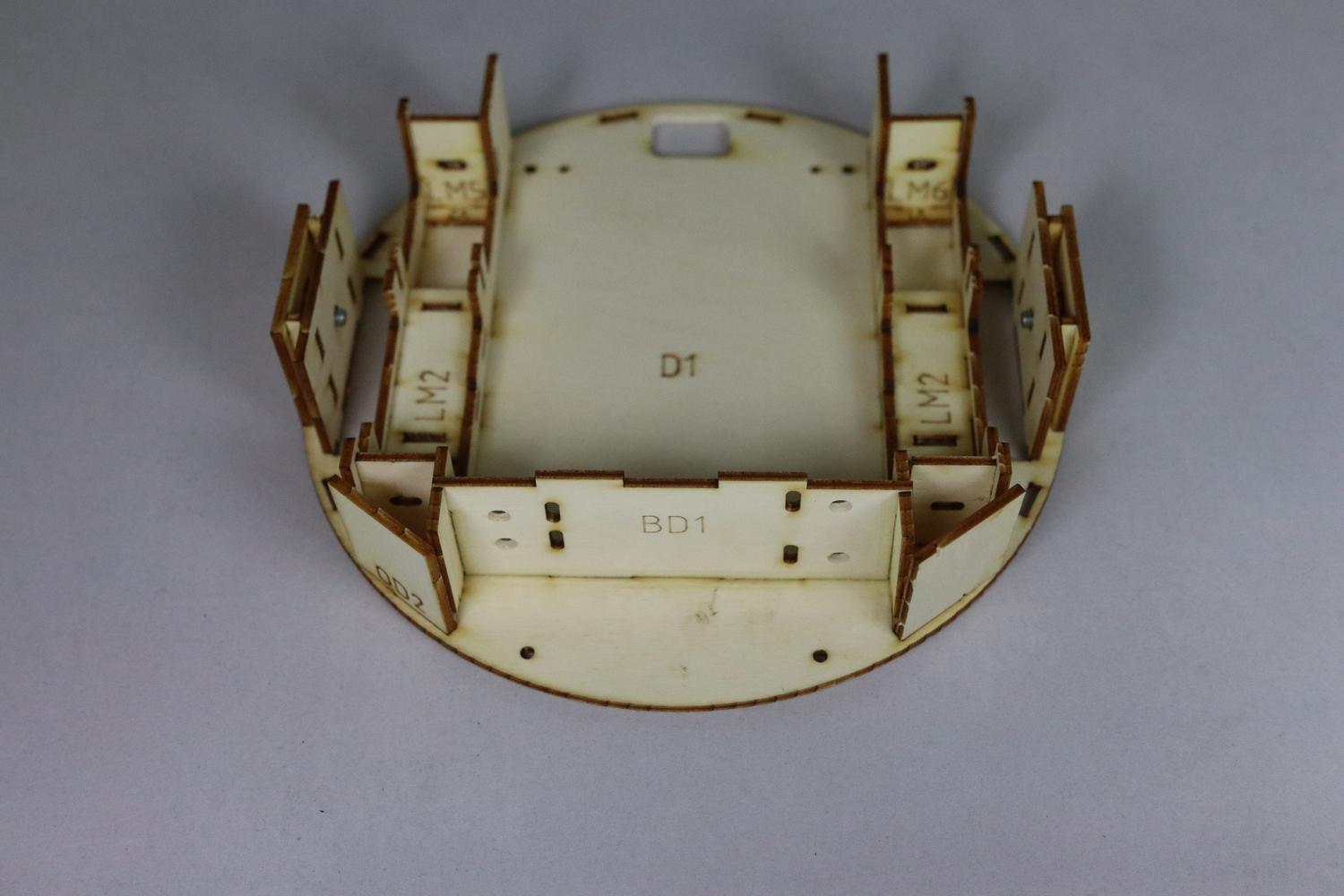
Díly OD2 vložte na pozici pouze na sucho bez lepidla.
23
Nyní si najděte všechny díly OD1 a jen je na sucho bez lepidla vložte do podvozku. Vkládejte popisky směrem ven. Proč? Viz Pro zvídavé. Následně to celé přiklopte palubou a přitáhněte palubu šrouby M4x45. Je vhodné zahloubit díry pro hlavičky šroubů. Narovnejte si dřívka tak, aby byla všechna rovně.

24
Omotejte boční díly v jejich horní části (co nejvíce nahoře) elastickou nití přibližně 5x dokola a během omotávání nit napínejte. Pro uvázání začátku a konce nitě je možné použít otvory v zadní části paluby. Snažte se vést jednotlivé dráhy nitě co nejblíže u sebe. Zamotanou nit následně zalepte lepidlem.

25
Mezi díly OD1, OD2 naneste lepidlo podle obrázku, aby podvozek držel pohromadě. Lepidlo naneste rovněž mezi díly OD1, OD2 a spodní palubu.
26
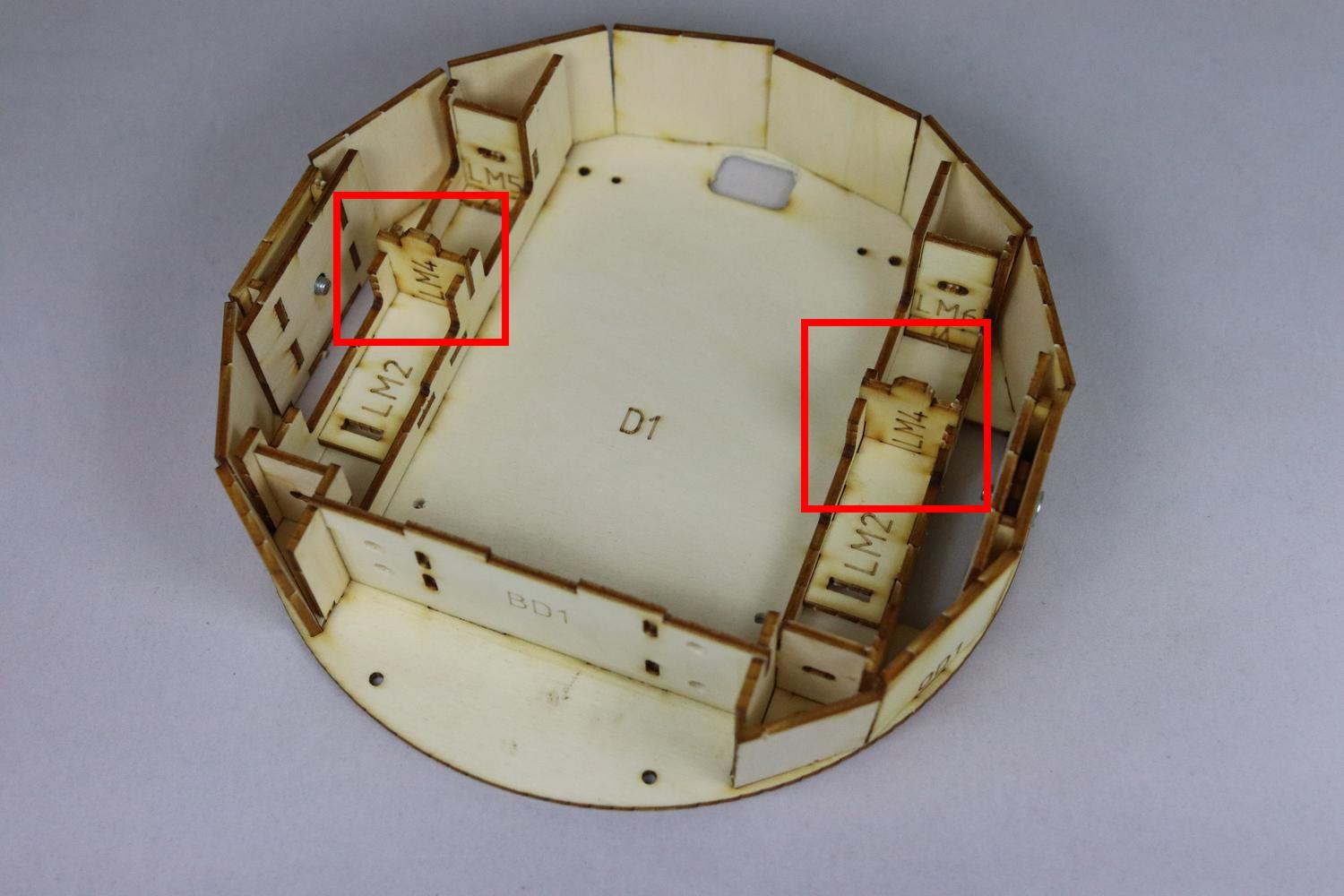
Sundejte horní palubu. Vlepte díly LM4 do lože pro motory.

27
Nasaďte horní palubu. Zahloubte díry na podvozku, které jsou z jeho vnější strany, aby bylo možné vložit šrouby se zapuštěnou hlavou.
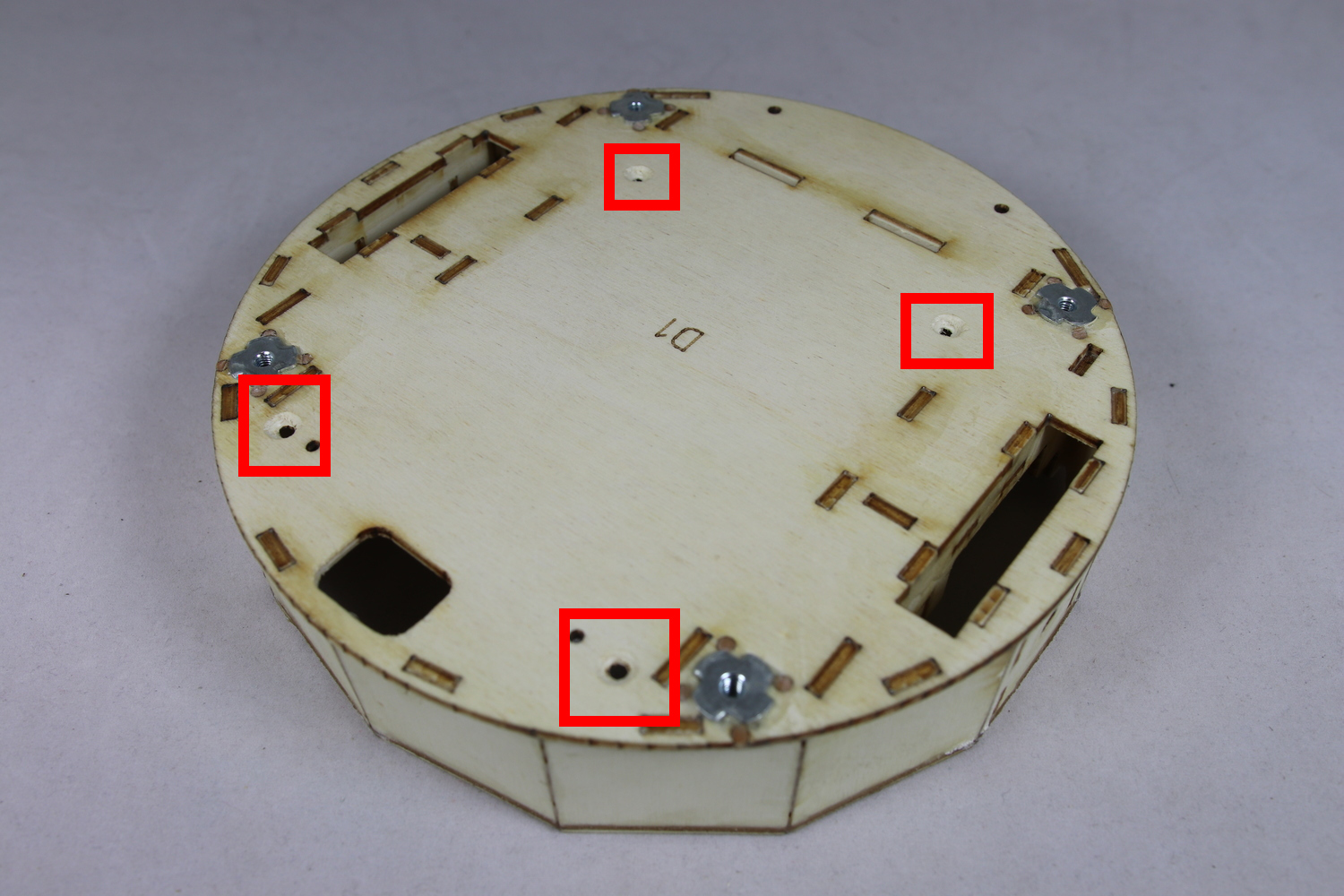
28
Zahloubíme všechny čtyři díry podle obrázku.
29
Vložíme šrouby M3x12 se zapuštěnou hlavou tak, aby směřovaly dovnitř a přitáhneme je maticí M3.
30
Nakonec šrouby z vnější strany zakápneme vteřinovým lepidlem.
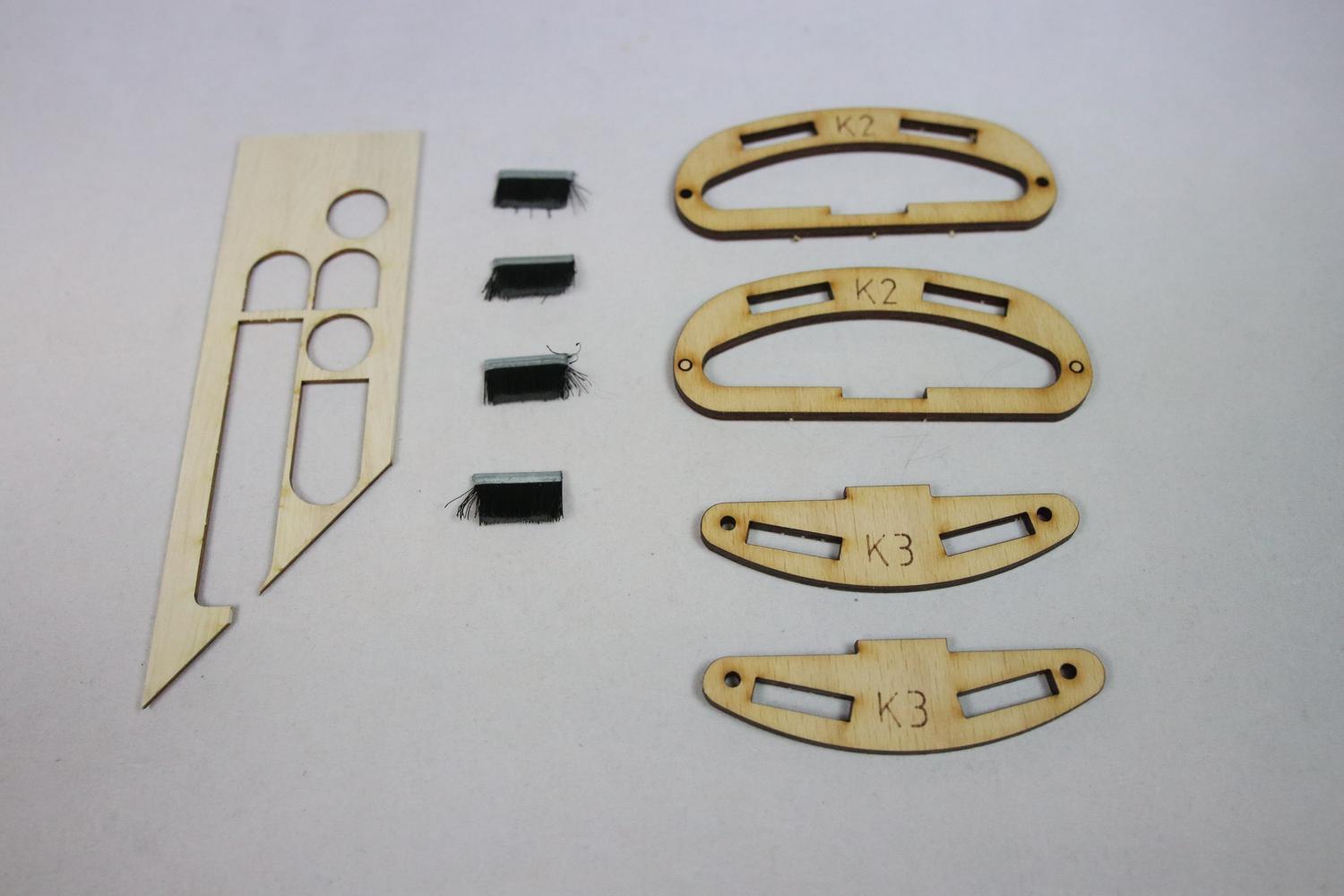
31
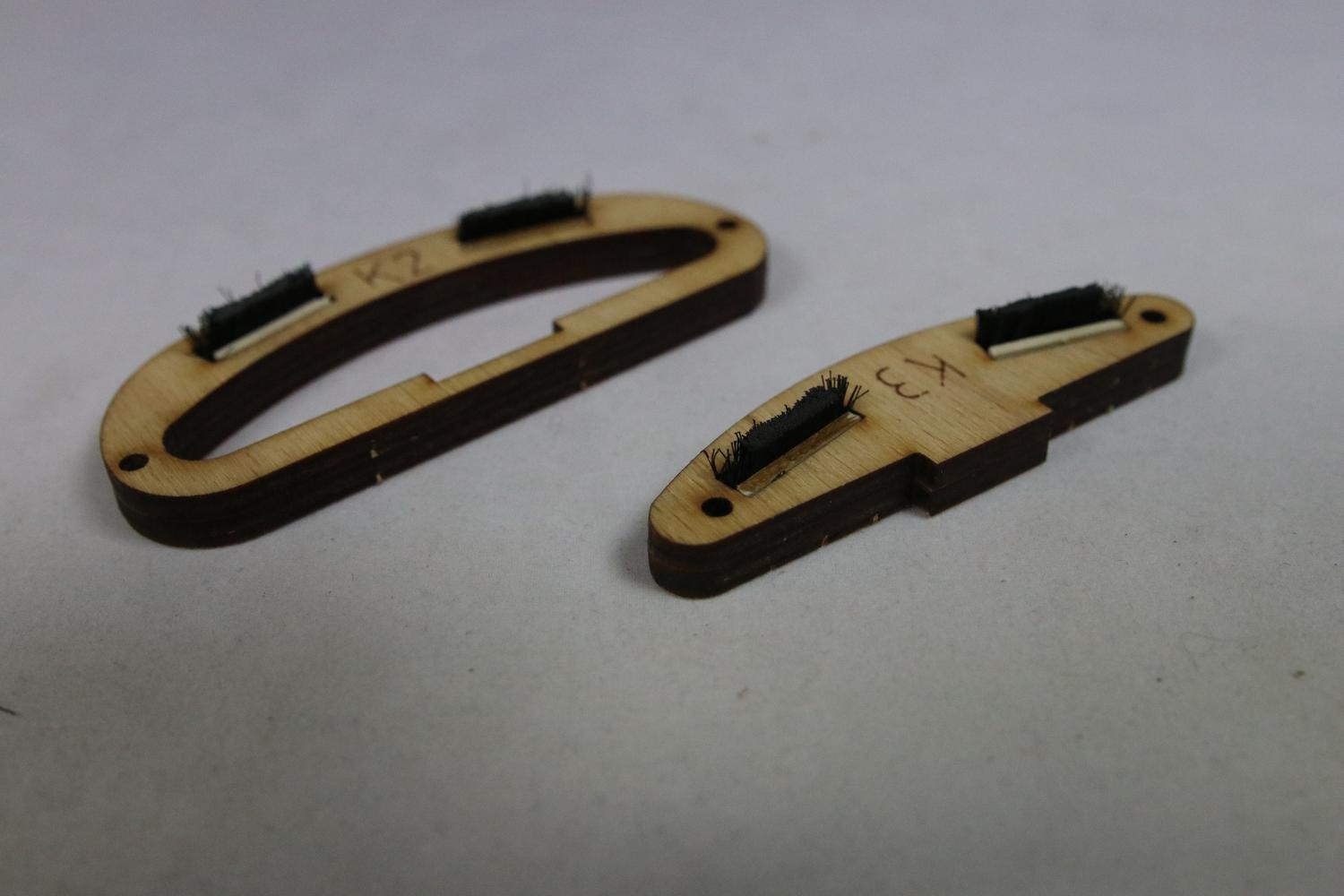
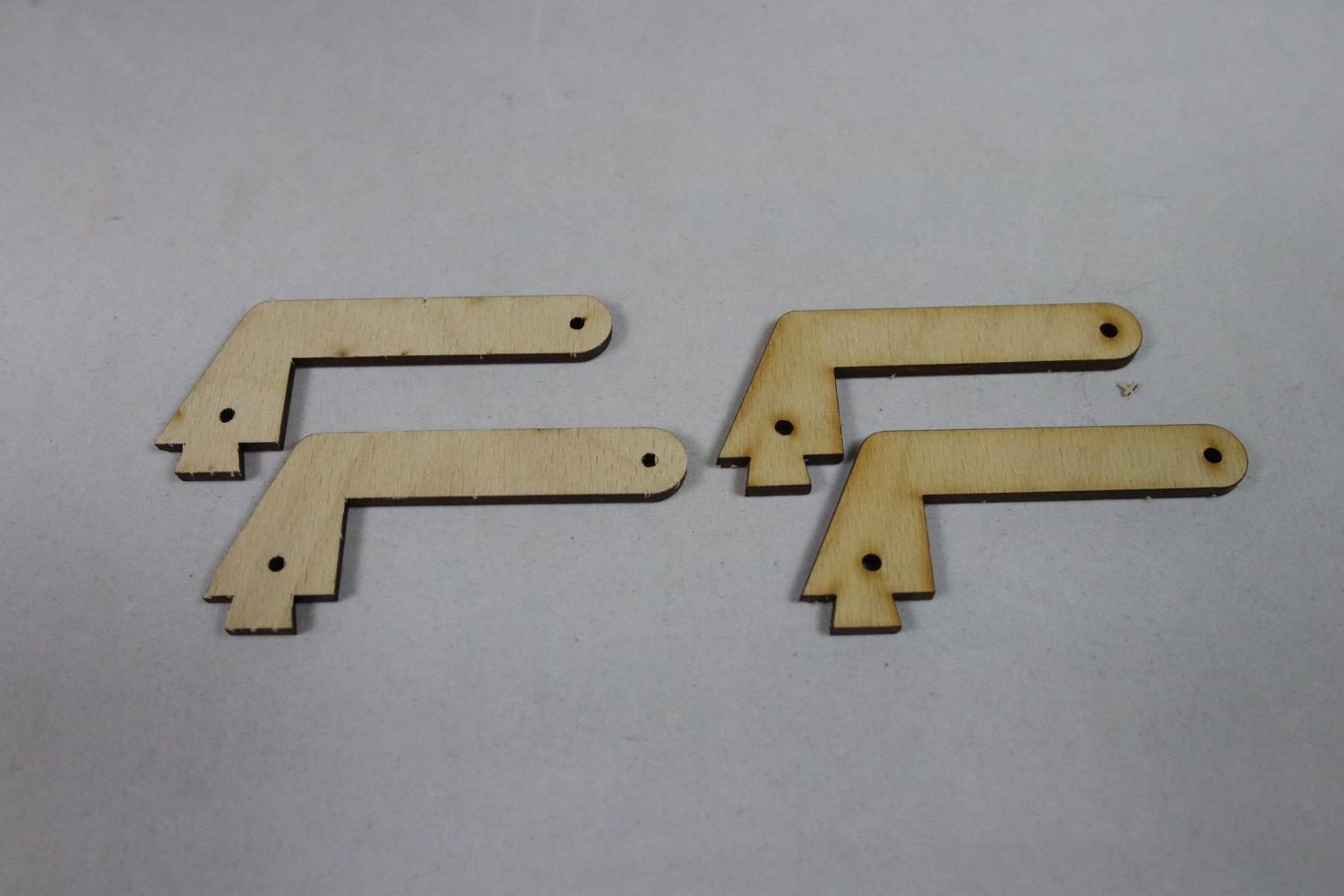
Všechny díly pro držák na kartáčky a senzorické lišty. Jeden z dílů K2 a jeden z dílů K3 je zakulacený (jedna hrana obroušena do kulata). U kartáčků je třeba mírně osmirkovat jeho hliníkový držák kolmo na osu štětin kartáčku.

32
Nyní byste měli mít dva díly K2 a dva díly K3. Je potřeba slepit dva díly K2 k sobě a dva díly K3 k sobě tak, aby byla zakulacená strana na kraji. Pro přesné napolohávání dílů při lepení si vezměte dva šroubky M3 a zasuňte je do dvou děr na dílech.
33
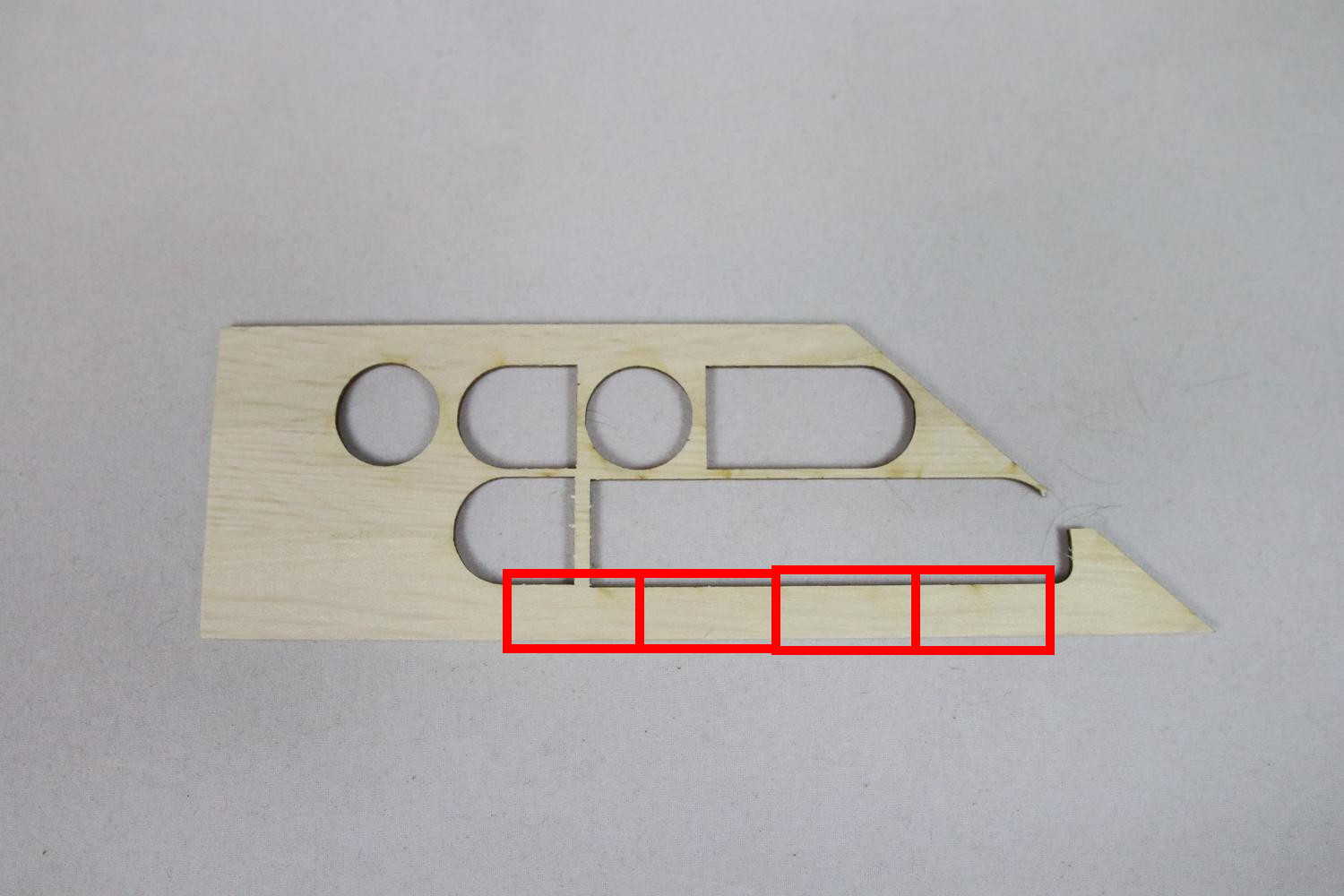
Z desky si nařežte 4 obdélníky s délkou 18 mm.
34
Nařezané dílky.

35
Postup sestavení.

36
Do dílu z K2 vlepíme nařezané dílky. Do dílu z K1 je vlepíme obdobně.

37
Kartáčky zasuňte mírně až za konec otvorů dílů K2 i K3, tak aby nepatrně přečuhovaly hliníkové držáky kartáčků ven z dřevěných dílů. Hliníkové držáky zalepte vteřinovým lepidlem a před zaschnutím opřete o rovnou desku pokrytou igelitovým sáčkem. Tímto zarovnáte hliníkový konec kartáčku s rovinou dílu. Výsledek by měl být jako na obrázku.
38
Správně zasunuté dílky a kartáčky (bez zaoblené hrany).

39
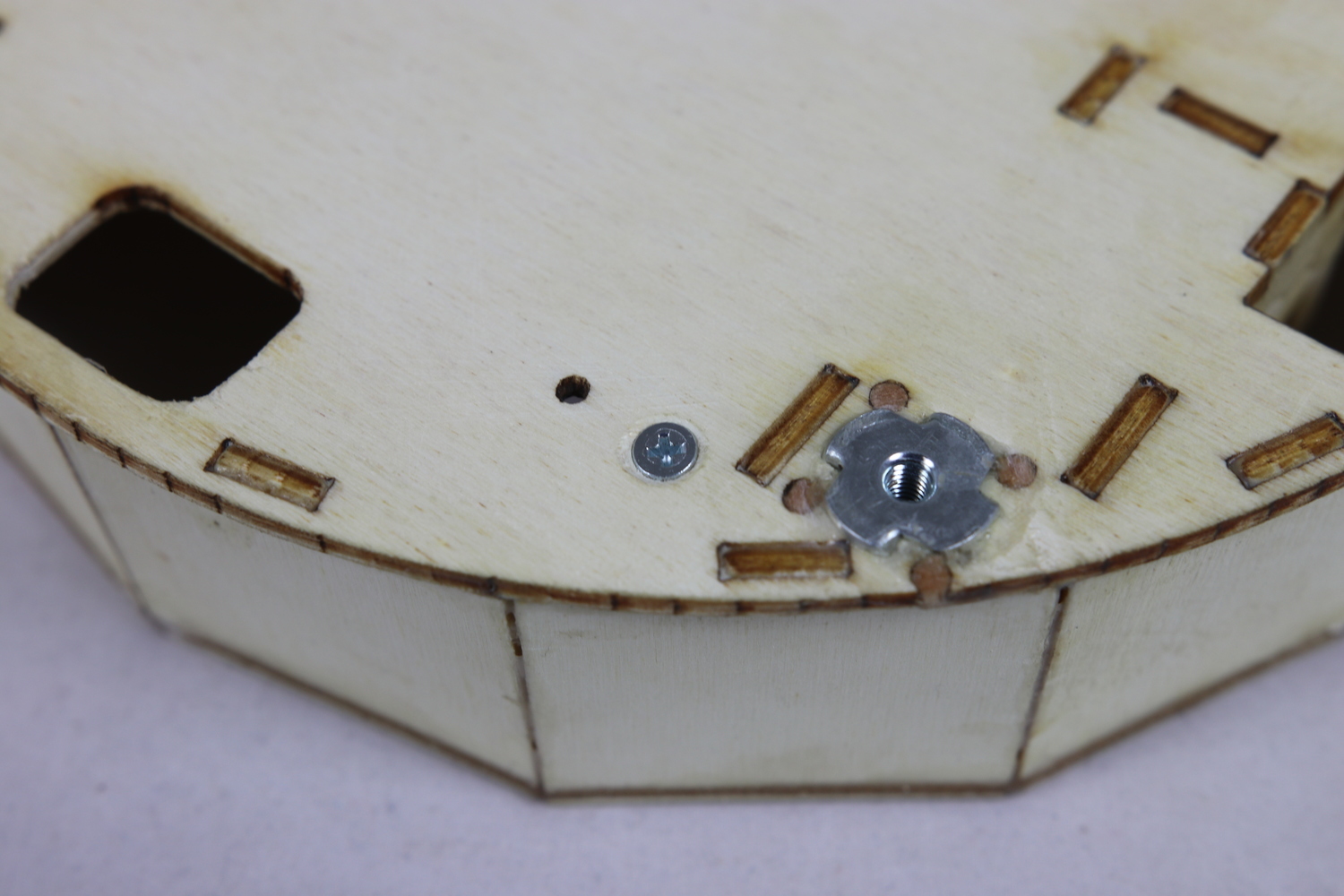
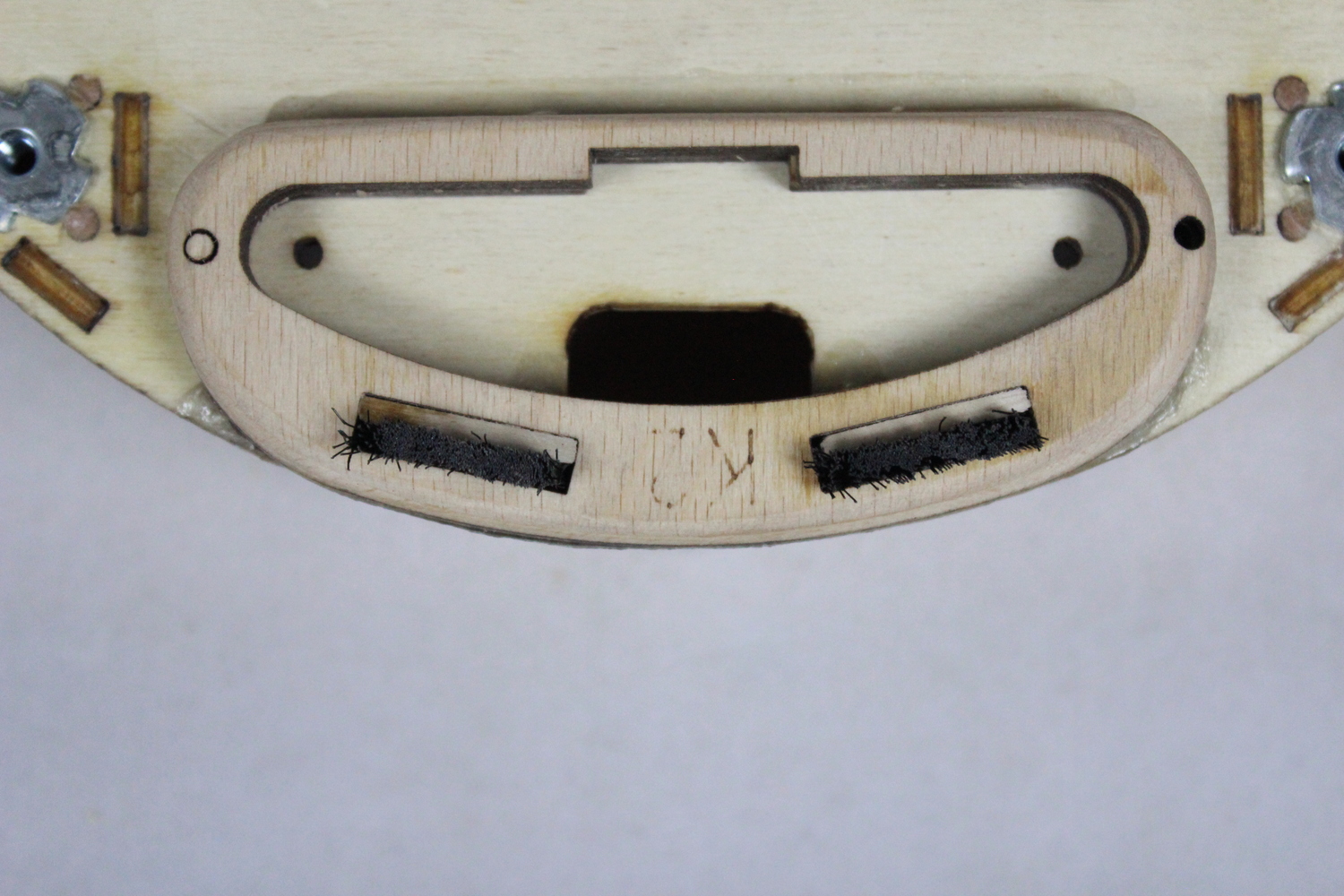
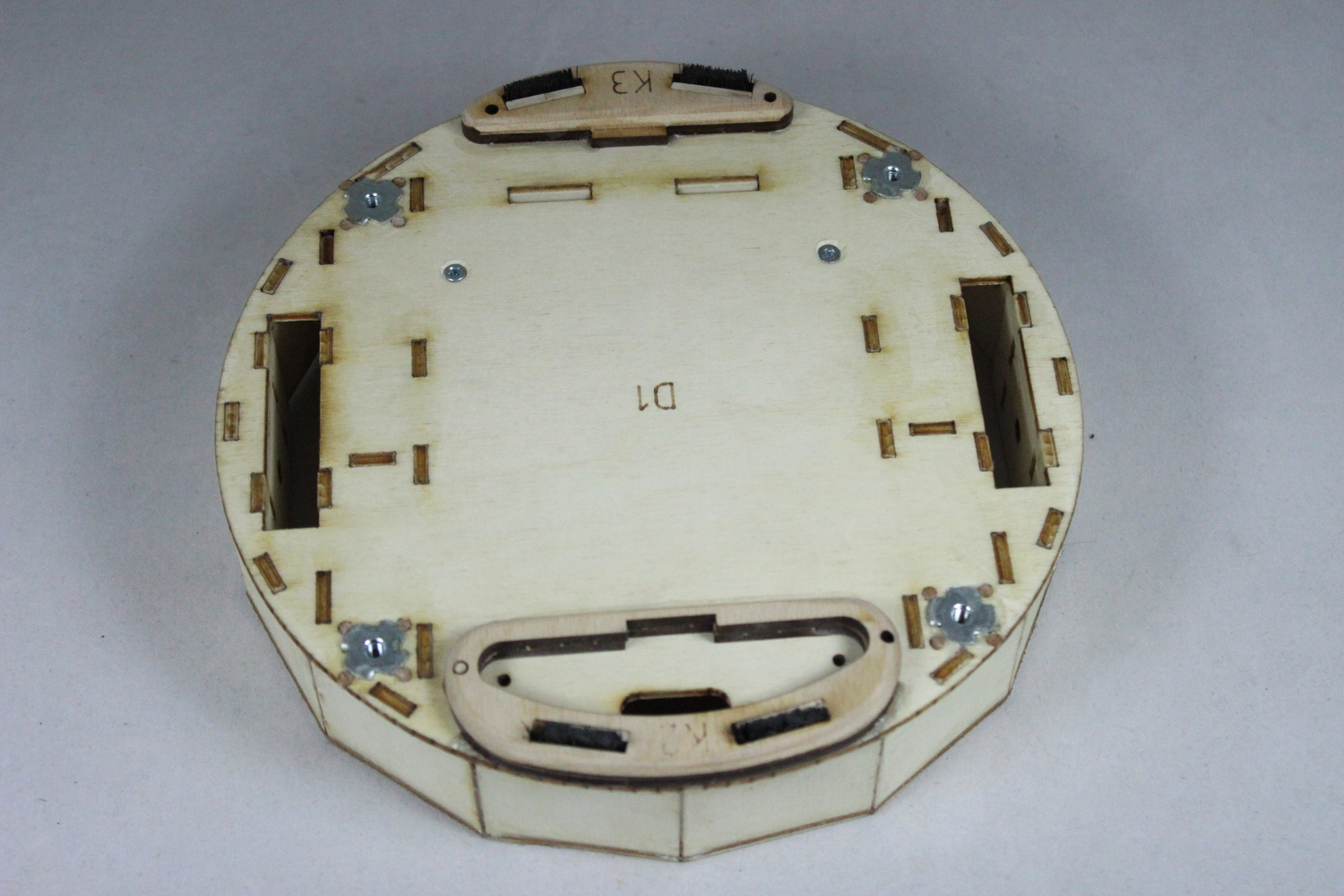
Slepený díl K3 přilepte zespodu podvozku k části s otvorem na battery pack. Mějte díl zarovnán s okrajem šasi a symetricky.
40
Slepený díl K2 přilepte zespodu podvozku naproti předchozímu dílu K3. Mějte díl zarovnán s okrajem šasi a symetricky.
41
Výsledná podoba.
Kola a motory
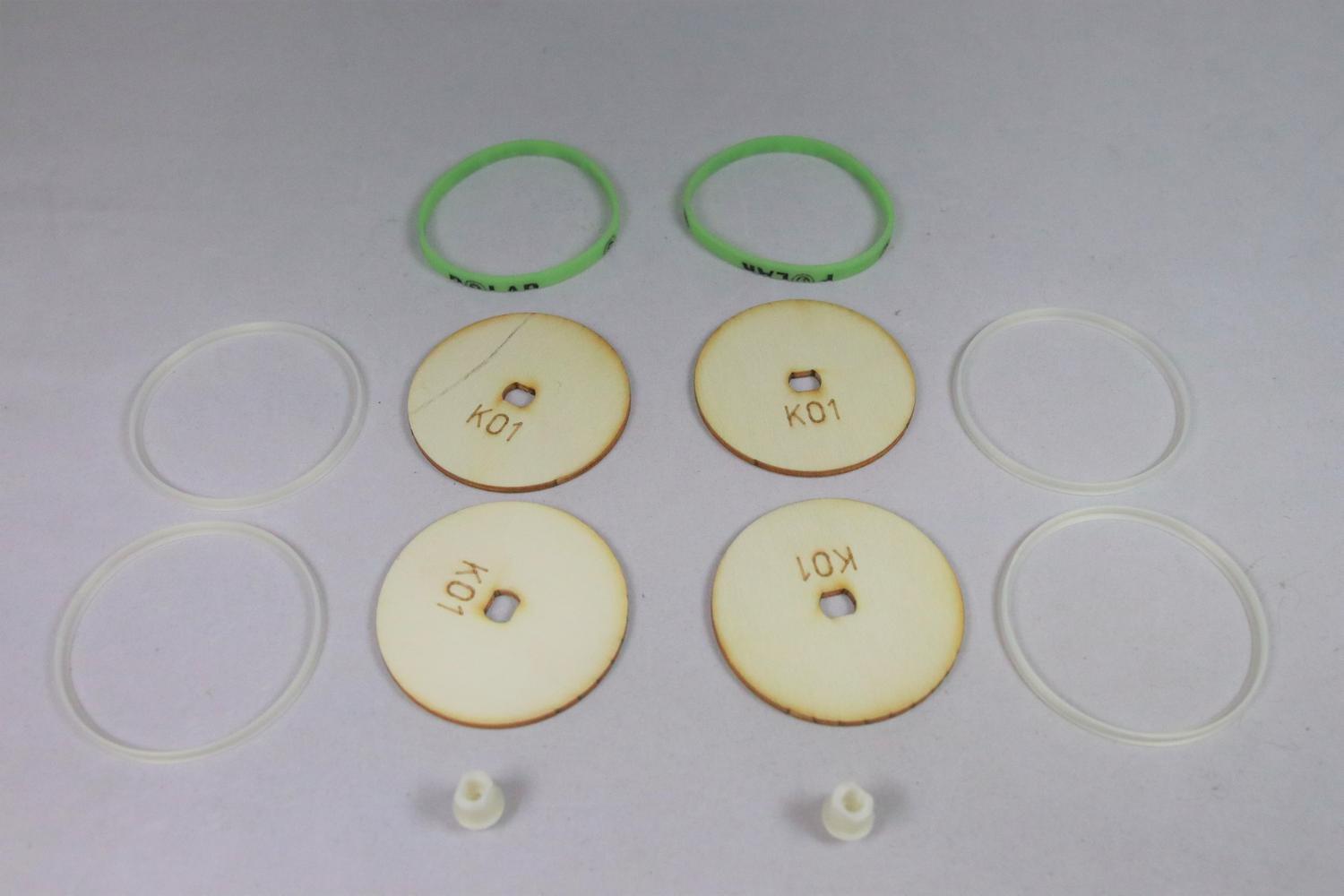
42
Připravte si díly pro výrobu kol.
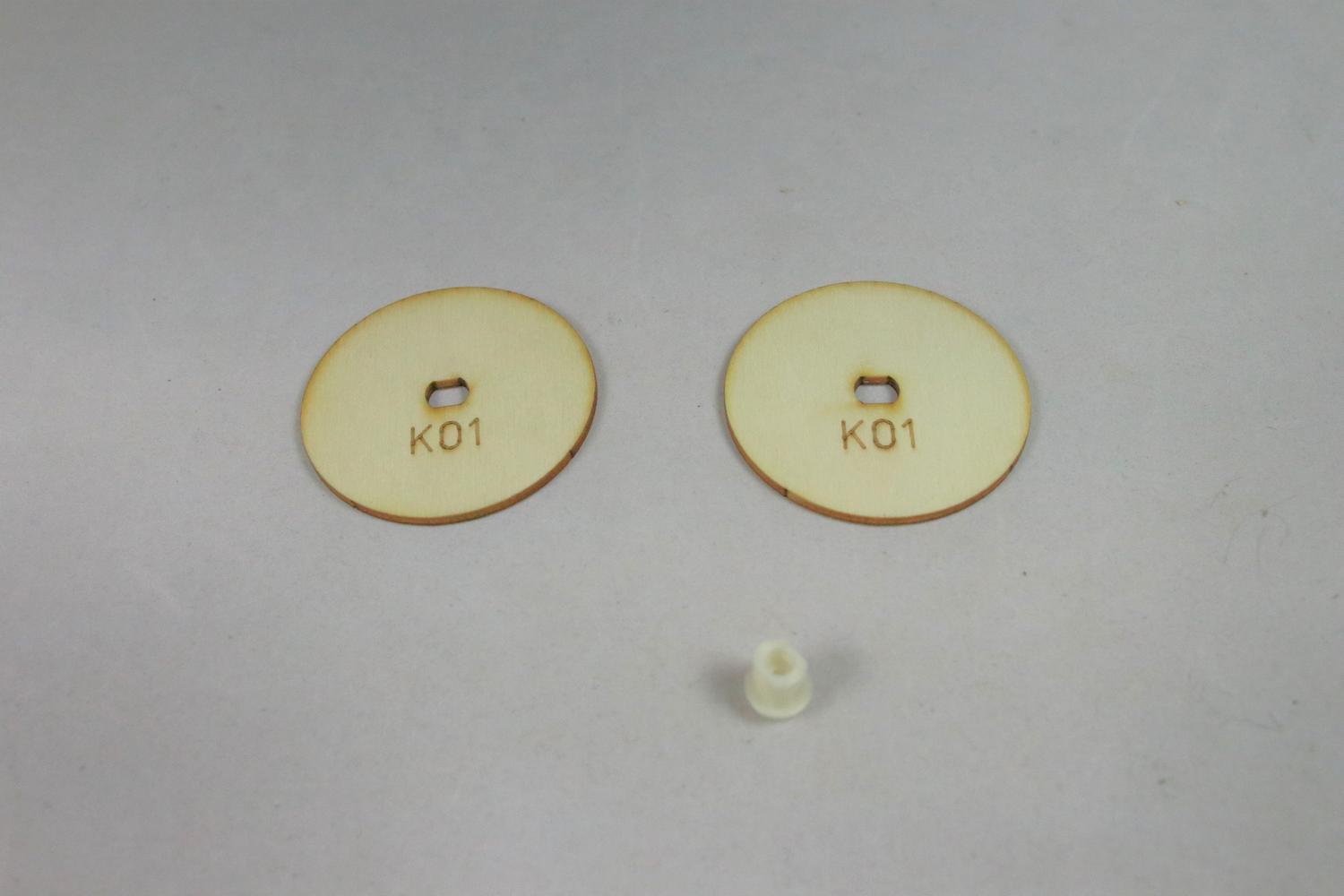
43
Vezměte dva díly kol a jeden plastový náboj kola.

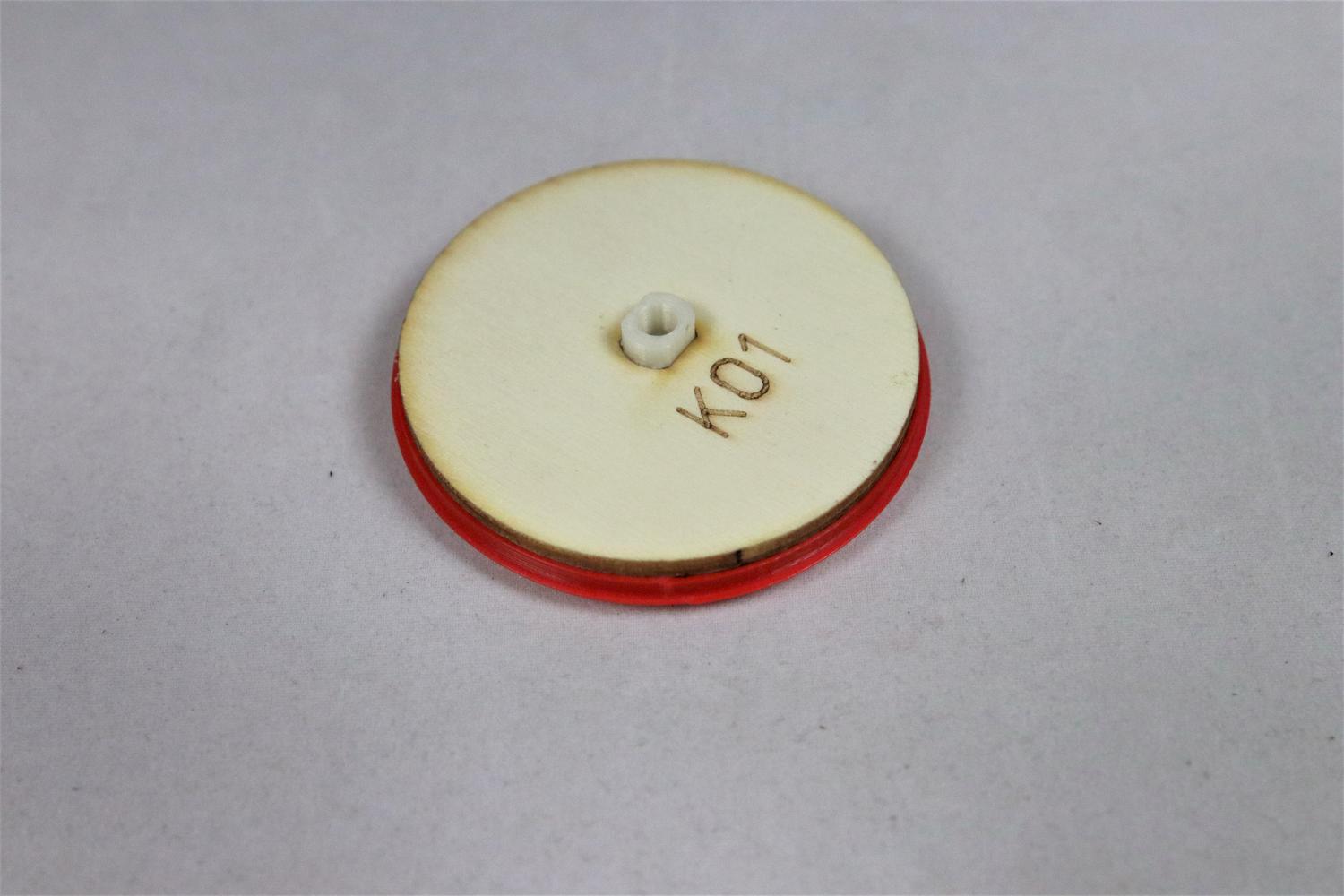
44
Vložte náboj kola do jedné dřevěné poloviny kola, kterou poté potřete z jedné strany lepidlem.

45
Na stranu potřenou lepidlem přilepte druhou polovinu kola. Pevně stiskněte, zasvorkujte a nechte zaschnout!
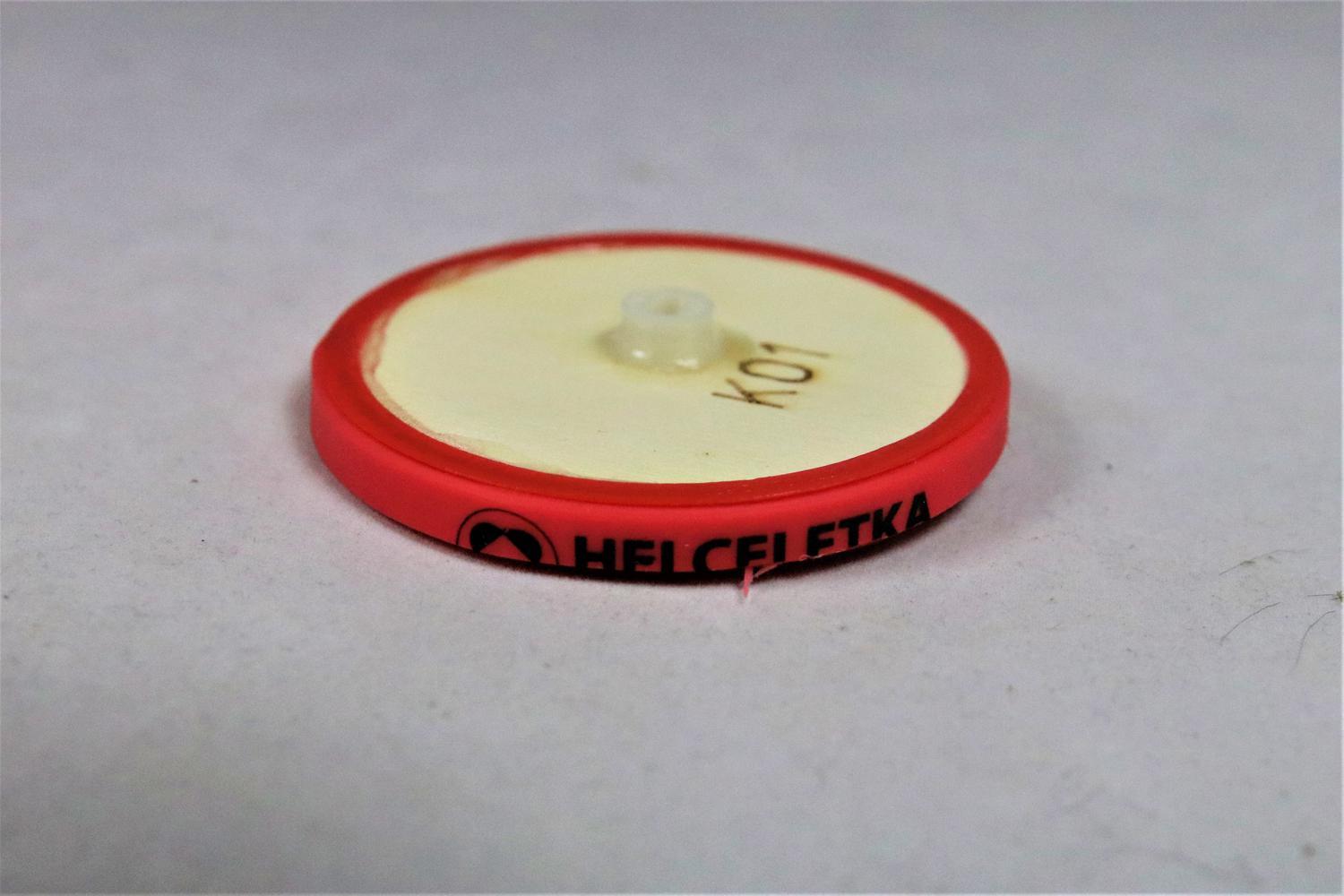
46
Náboj kola zalepte vteřinovým lepidlem a potom na kolo nasaďte jednu plastovou kružnici.

47
Stejný postup proveďte na druhé straně. Oba díly slepte vteřinovým lepidlem, které nanesete do mezery mezi plastovými částmi. Počkejte až zaschne vteřinové lepidlo.
48
Jakmile lepidlo zaschne, natáhněte na kolo gumičku.

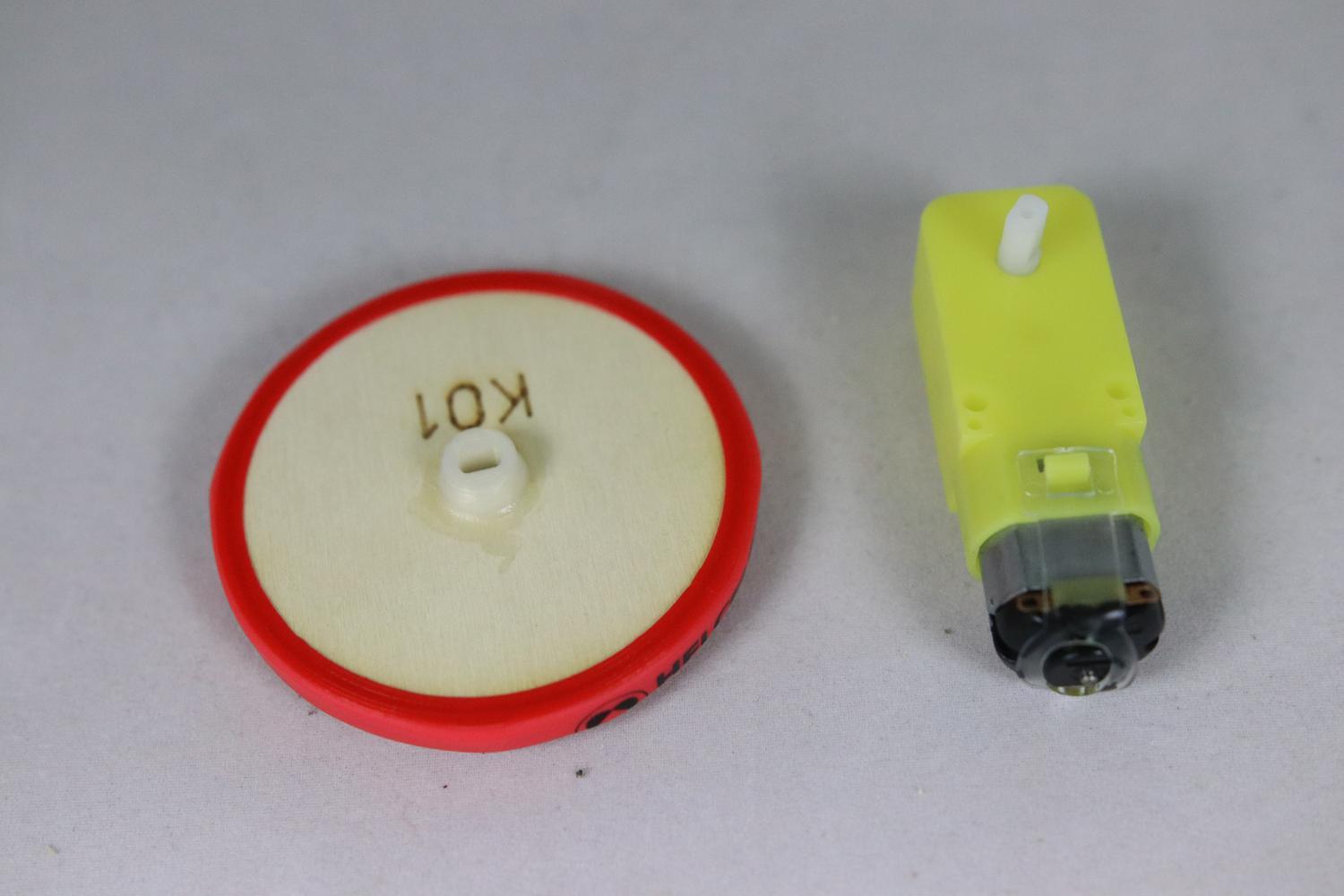
49
Nyní vezměte dva žluté motory.

50
Hřídel motoru je třeba na straně s výstupkem zkrátit.

51
Zkrácený hřídel.
52
Připravte si kolo a motor.
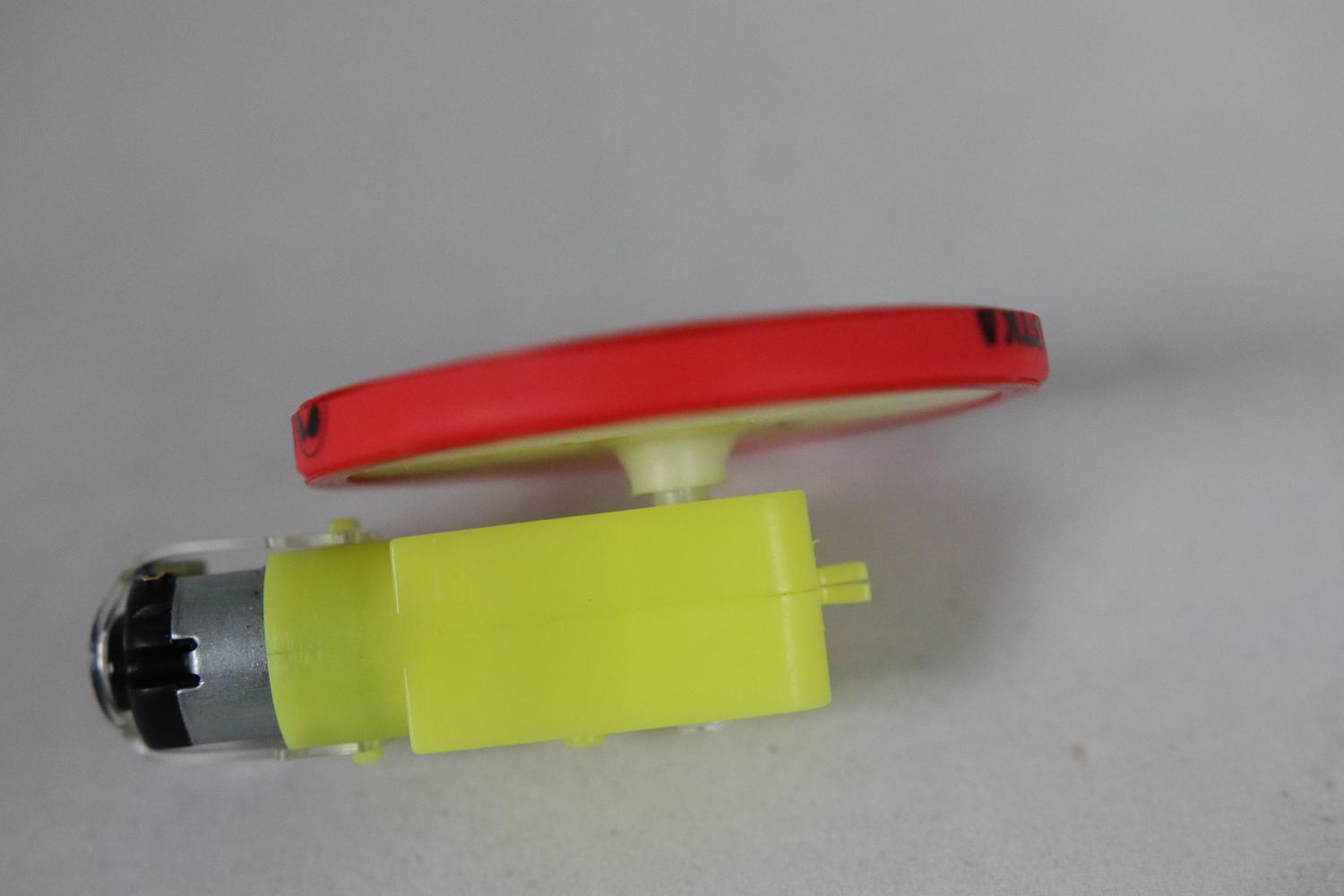
53
Motor nasaďte na kolo tak, jako na fotce.
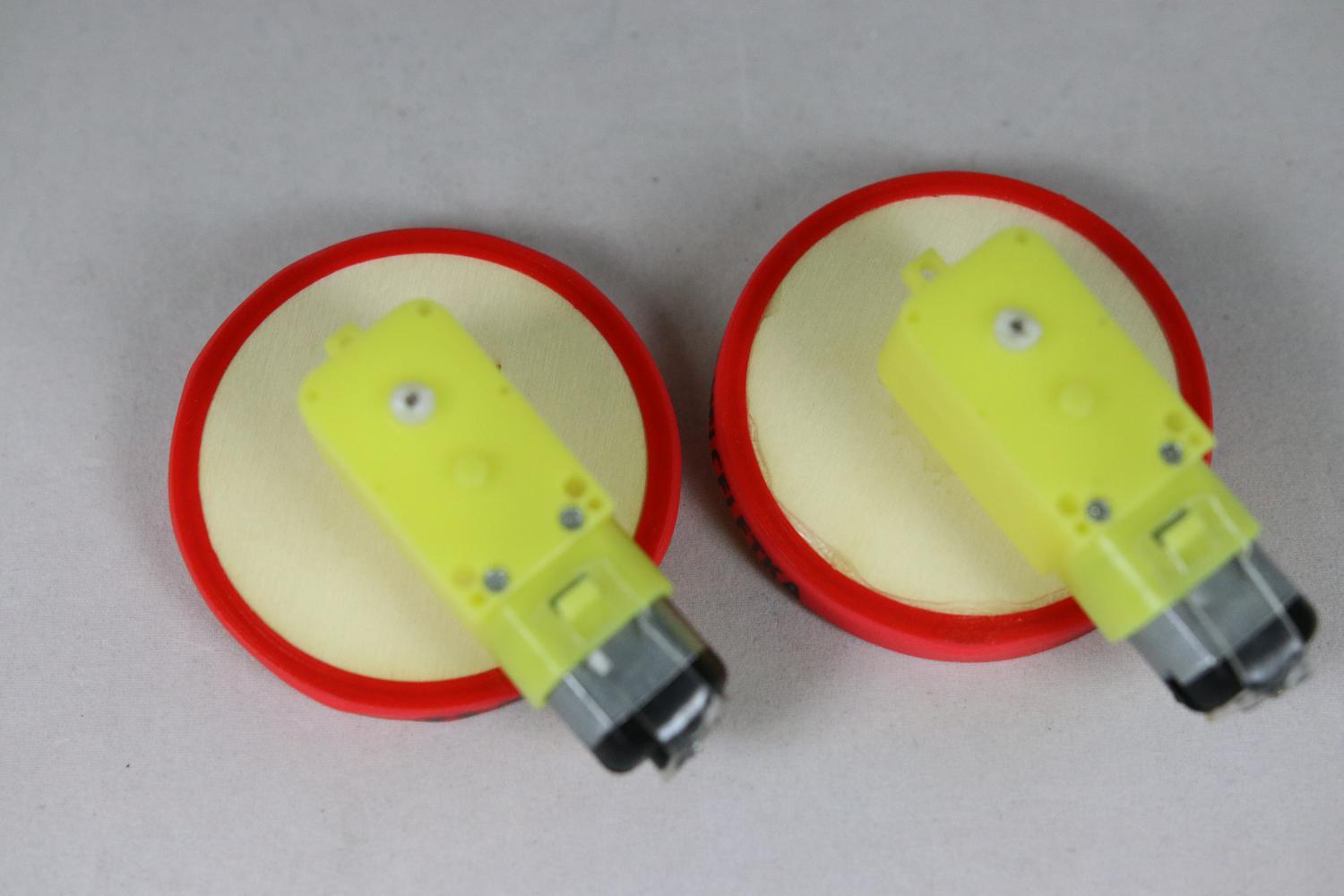
54
Totéž proveďte i s druhou dvojicí kolo - motor.
55
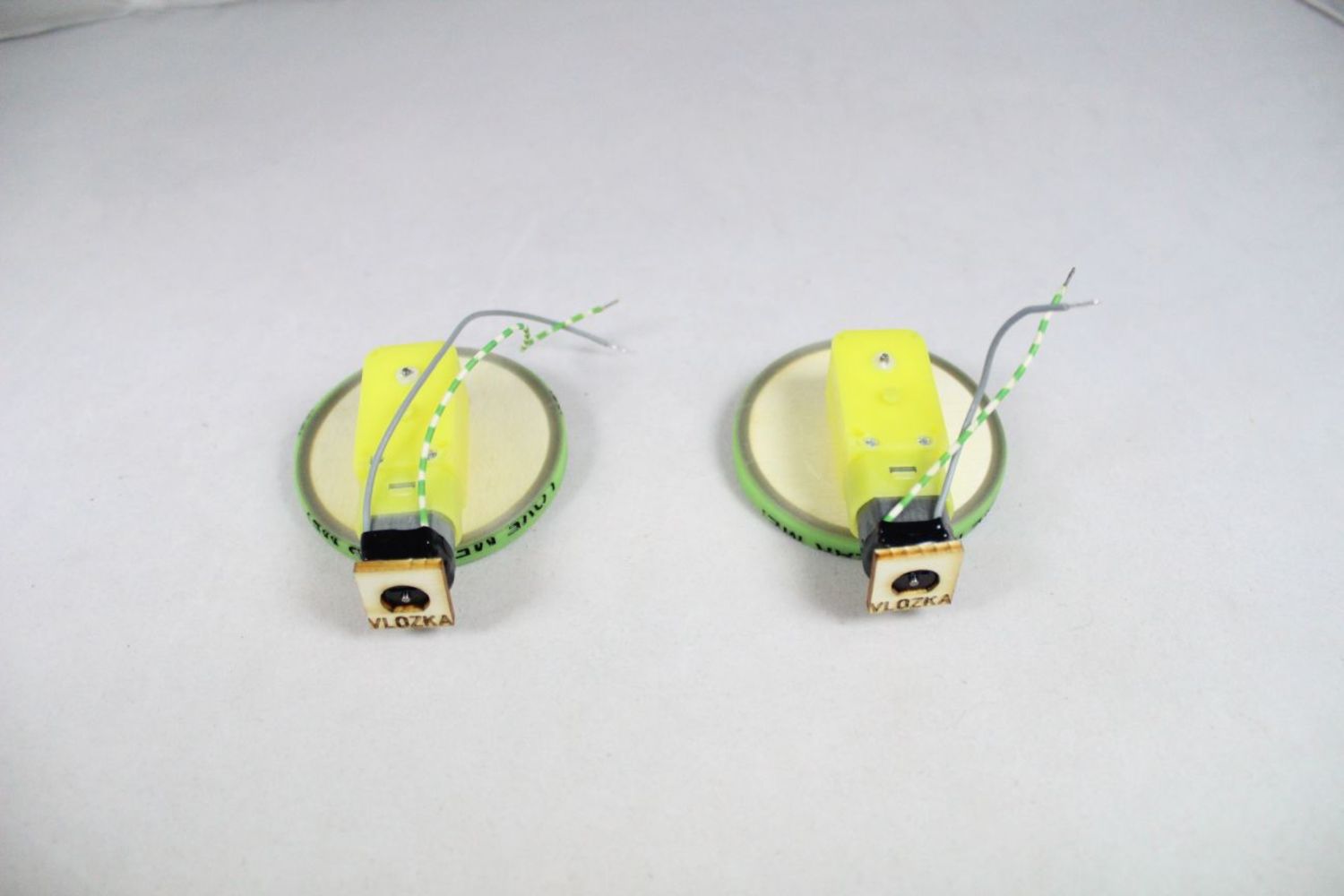
Na zadní části motorů nasaďte dřevěné vložky.
56
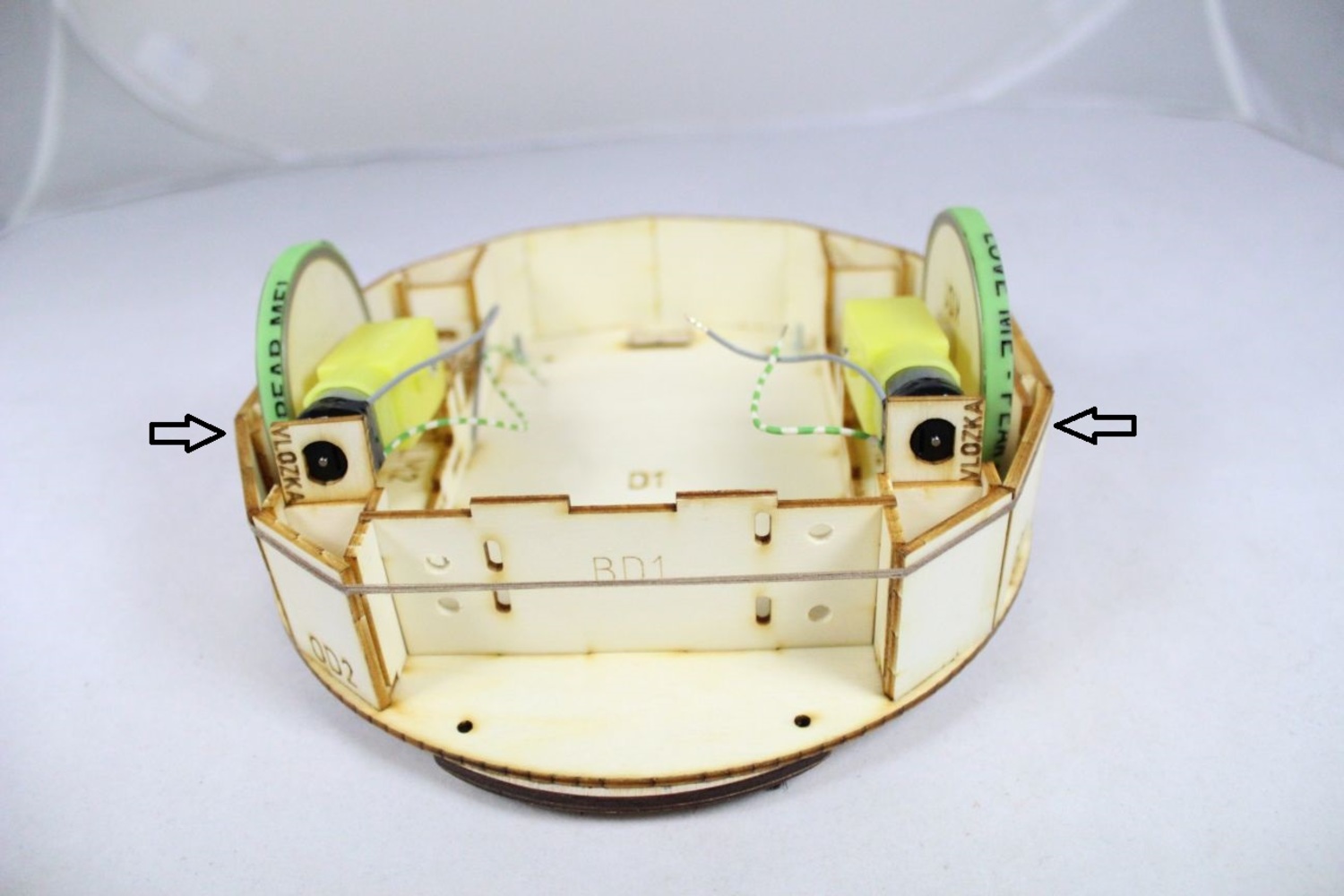
Částečně vyšroubujte oba 2 šrouby M4 z boků podvozku vyznačené šipkami. Nyní kola s motory vložte a zasuňte do podvozku. Motor s delšími kabely patří nalevo ve směru jízdy (nalevo na obrázku). Pokud se motor s dřevěnou vložkou nevejdou do lože, je třeba zaříznout smršťovací bužírku kolem motoru.
57
Finální poloha zasunutých motorů. Nyní opět zašroubujeme a dotáhneme oba šrouby M4 z boků podvozku. Zkontrolujeme delší kabely na levém motoru.
Ruka
1
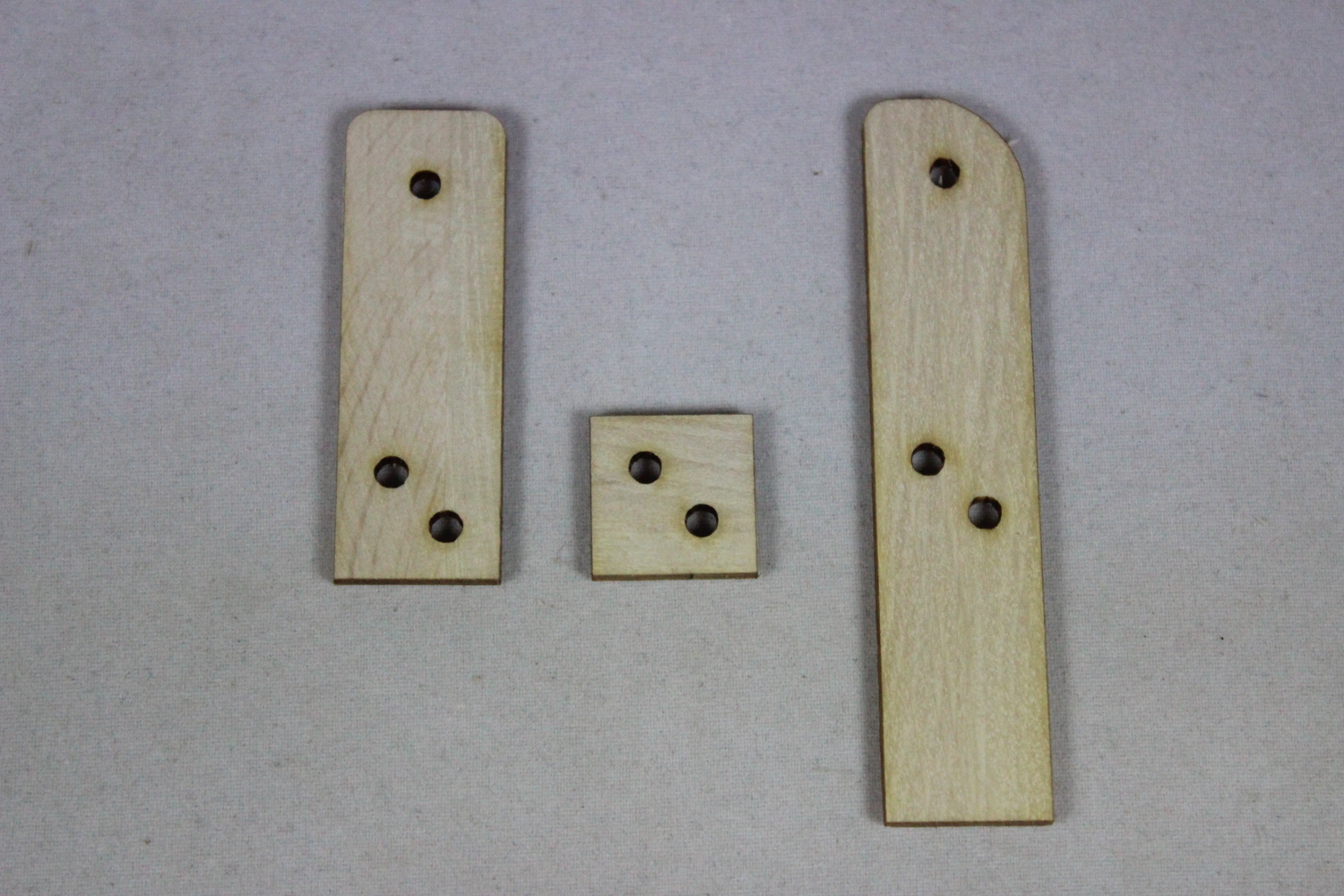
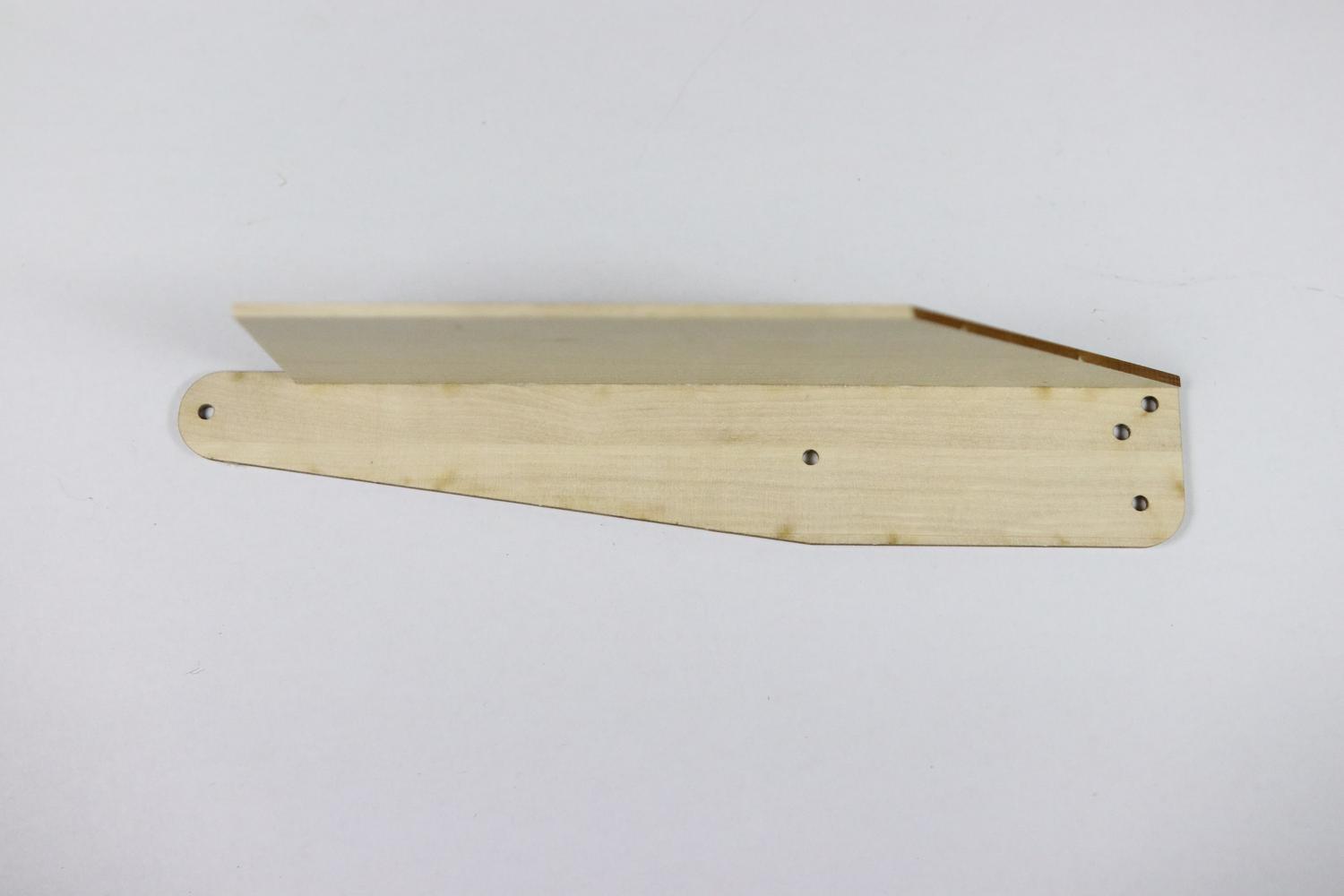
Nachystejte si díly z dřevíčkových desek.

2
Začneme slepením dolního dílu ruky. Připravíme si k tomu potřebné dílky.

3
V prvním části kroku nasadíme na bočnici zakulacené díly potřené lepidlem. Zatím nedomačkáváme. K přesnému umístění použijeme šrouby. V druhé části nasadíme spodní díl mezi zakulacené díly. V třetí části posuneme spodní díl co nejvíce dolů, což dále zpřesní polohu zakulacených dílů před zaschnutím. Zakulacené díly domáčkneme svorkami. Před zaschnutím odstraníme spodní díl.

4
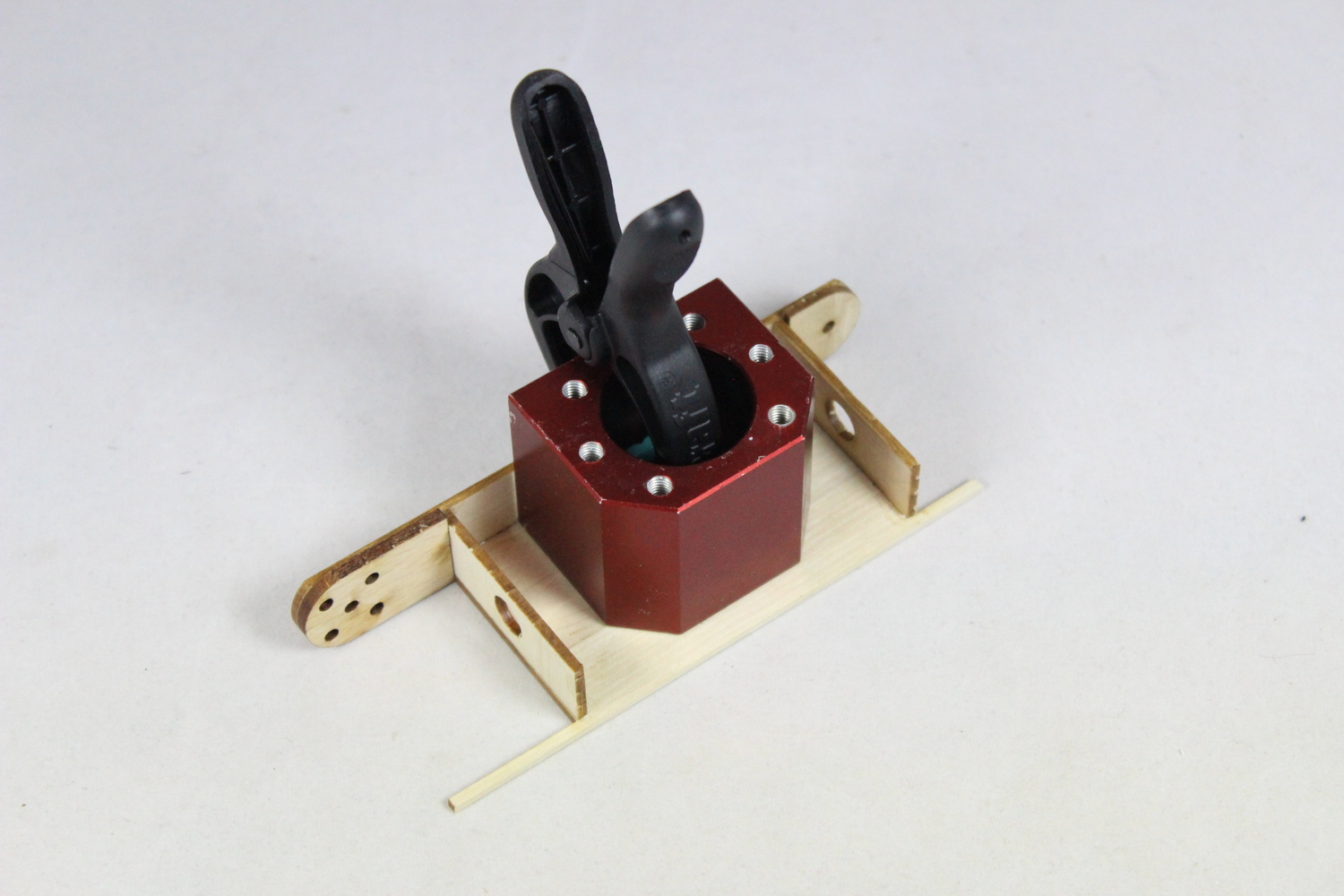
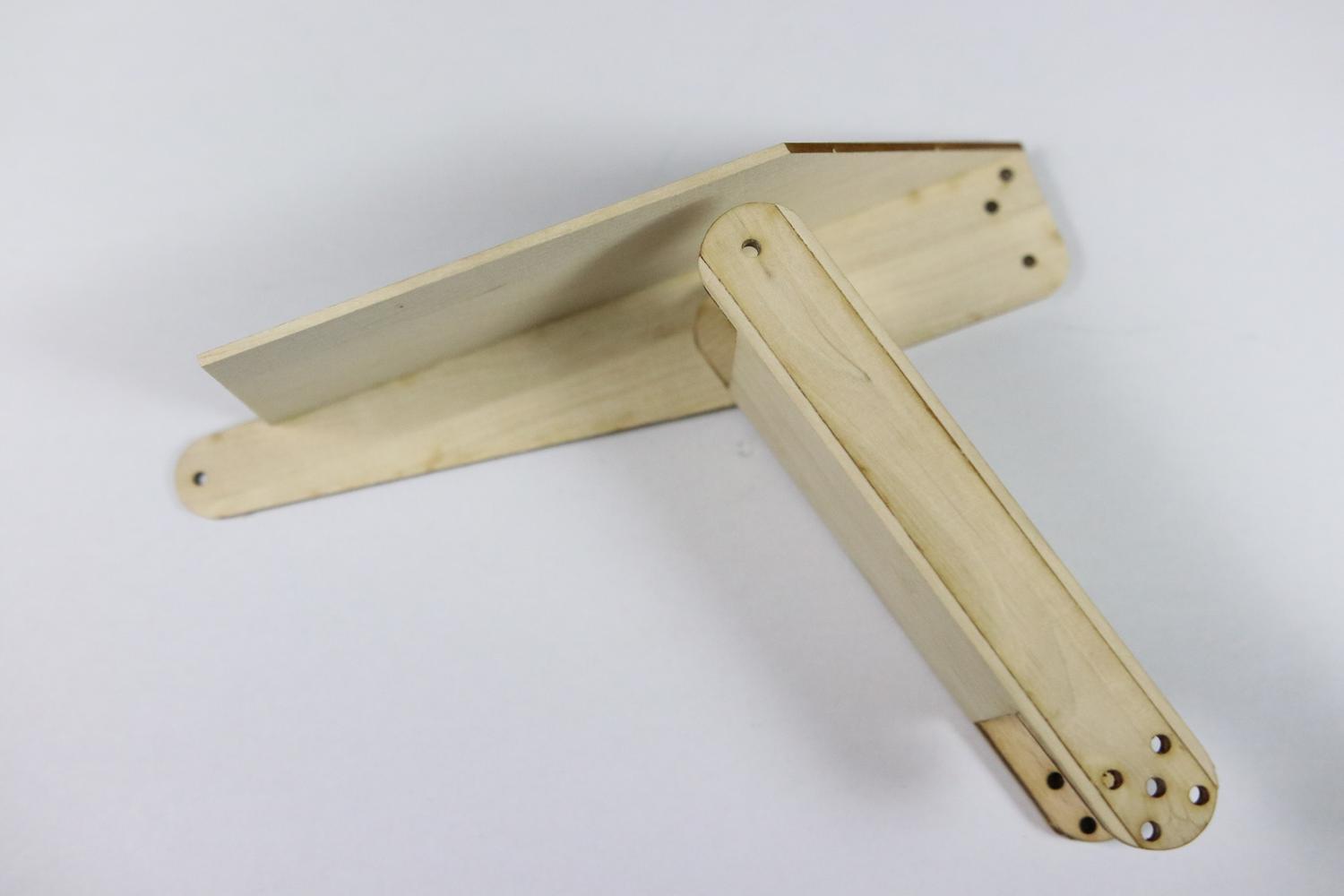
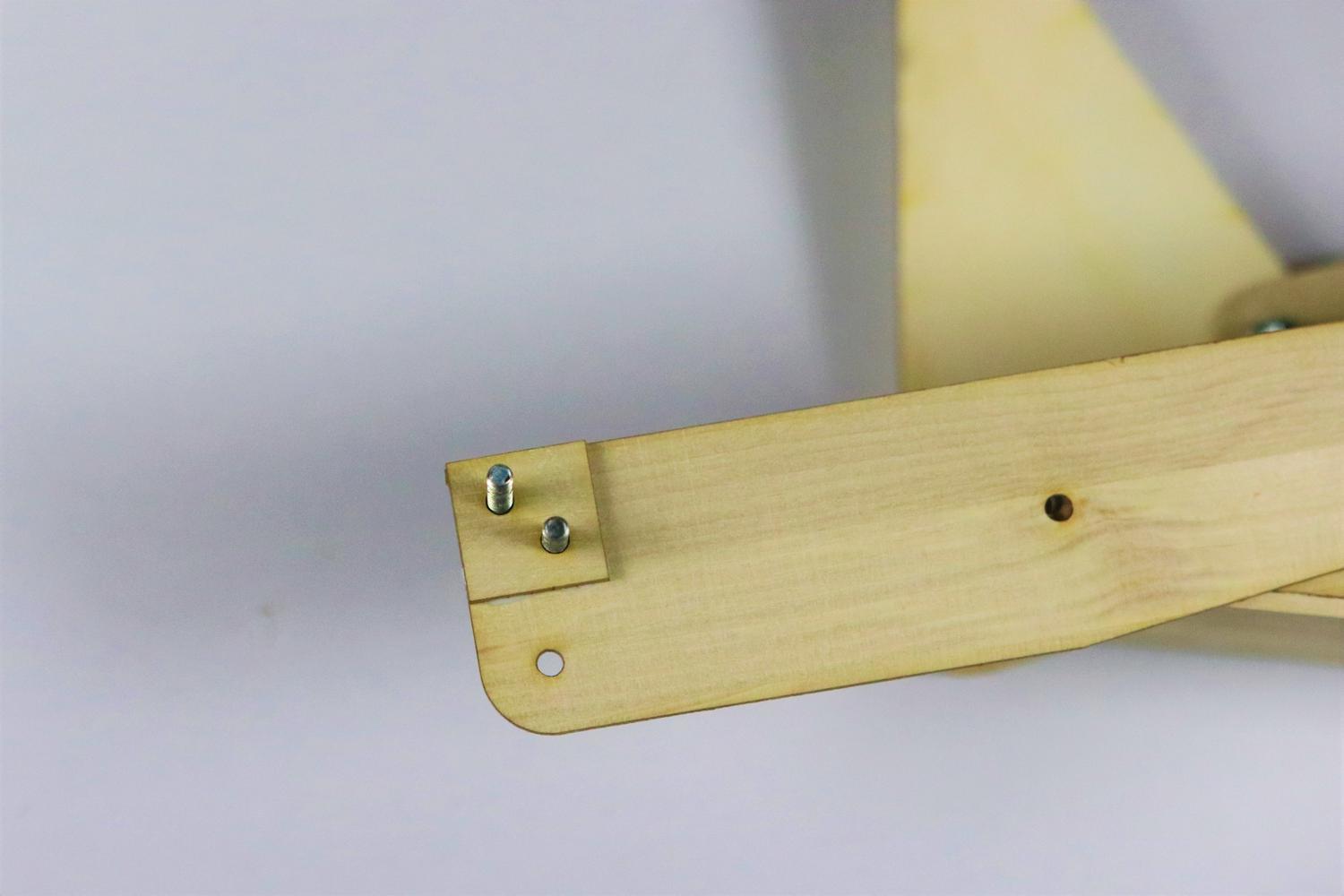
Bočnici s obdélníkem přilepte ke spodnímu dílu tak, aby na sebe byly všechny díly kolmé. Použijte jako pomůcku červenou hliníkovou kostku.
5
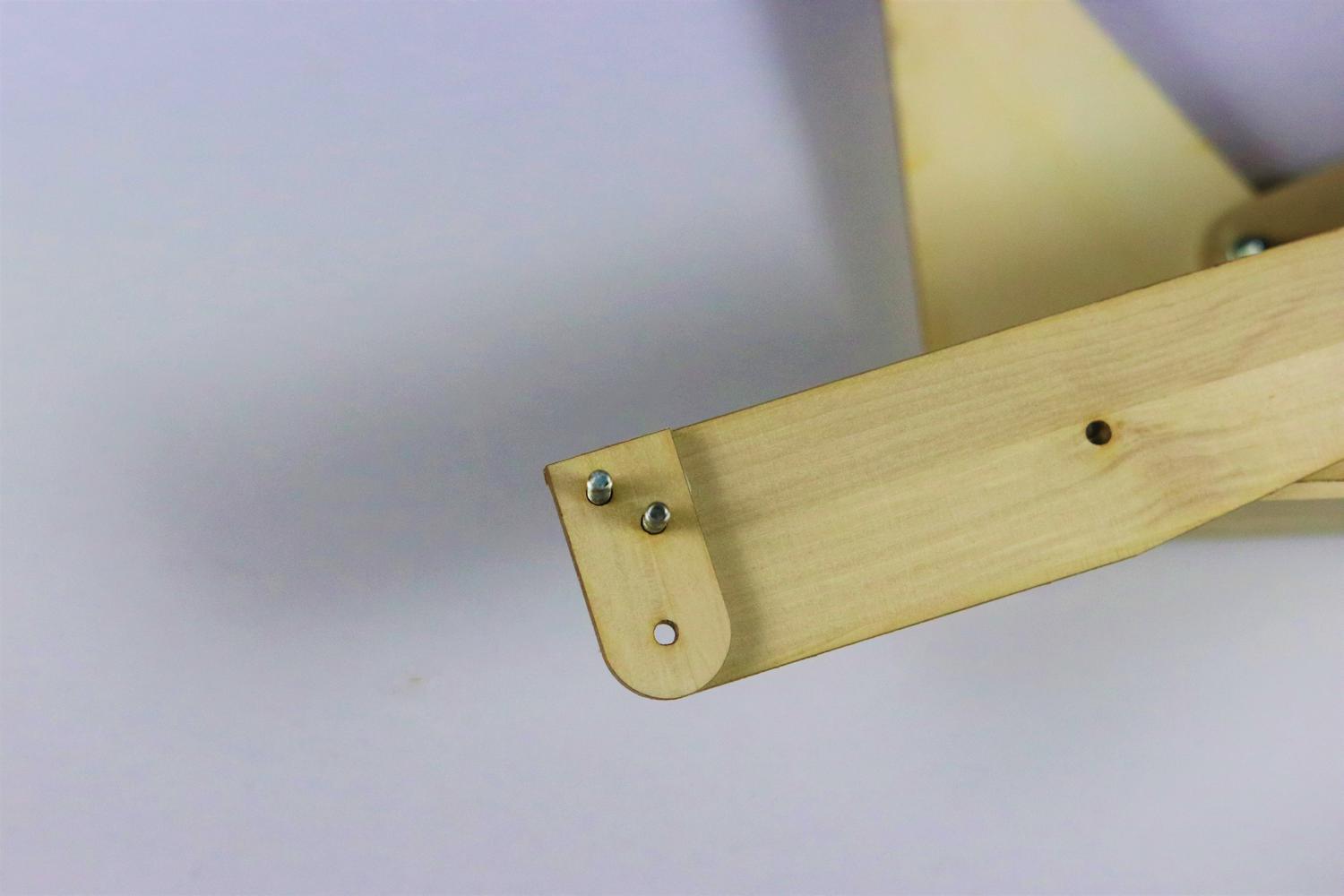
Obdélníkové díly s dírou přilepte rovněž kolmo podle obrázku.

6
Předminulý krok zopakujte i na druhé straně spodního dílu. Tentokrát kostku nepoužívejte. Pozicujte vůči již umístěným obdélníkům s dírou.
7
Nachystejte si kabel serva 2 (nejdelší). Na ploché konektory nasuňte smršťovací bužírku a smršťte ji.

8
Vybruste otvory spodního dílu do šířky tak, aby jimi prošly ploché konektory kabelu serva 2.
9
Zasuňte kabel serva 2 do spodního dílu skrze 2 rozšířené otvory. Na orientaci kabelu nezáleží. V dalších krocích je kabel zanedbán.

10
Přilepte i horní díl.

11
Ostré hrany na koncích dílu a případné nepřesnosti zbruste lehce do kulata.

12
Zabroušené konce. Tento díl je hotov.

13
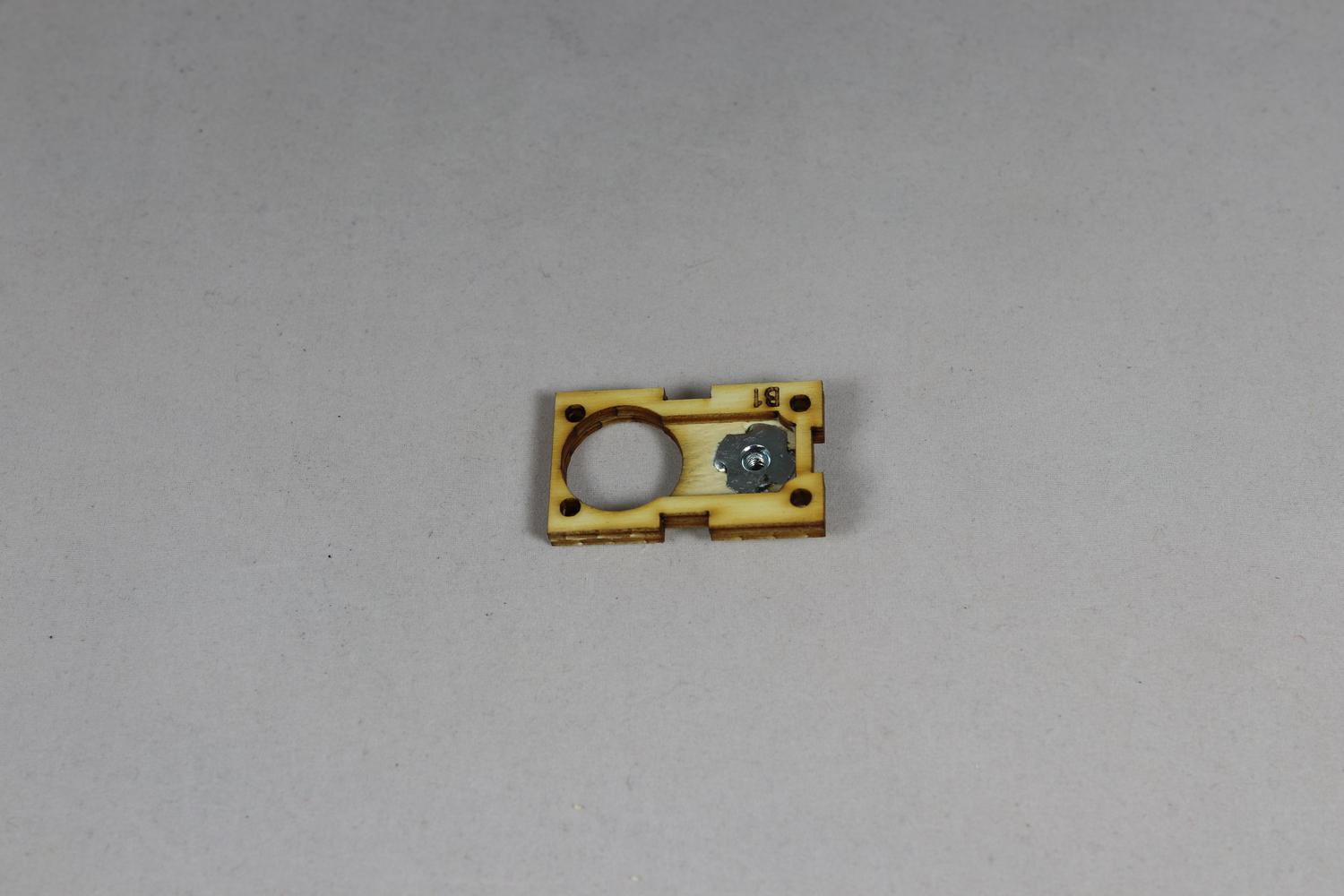
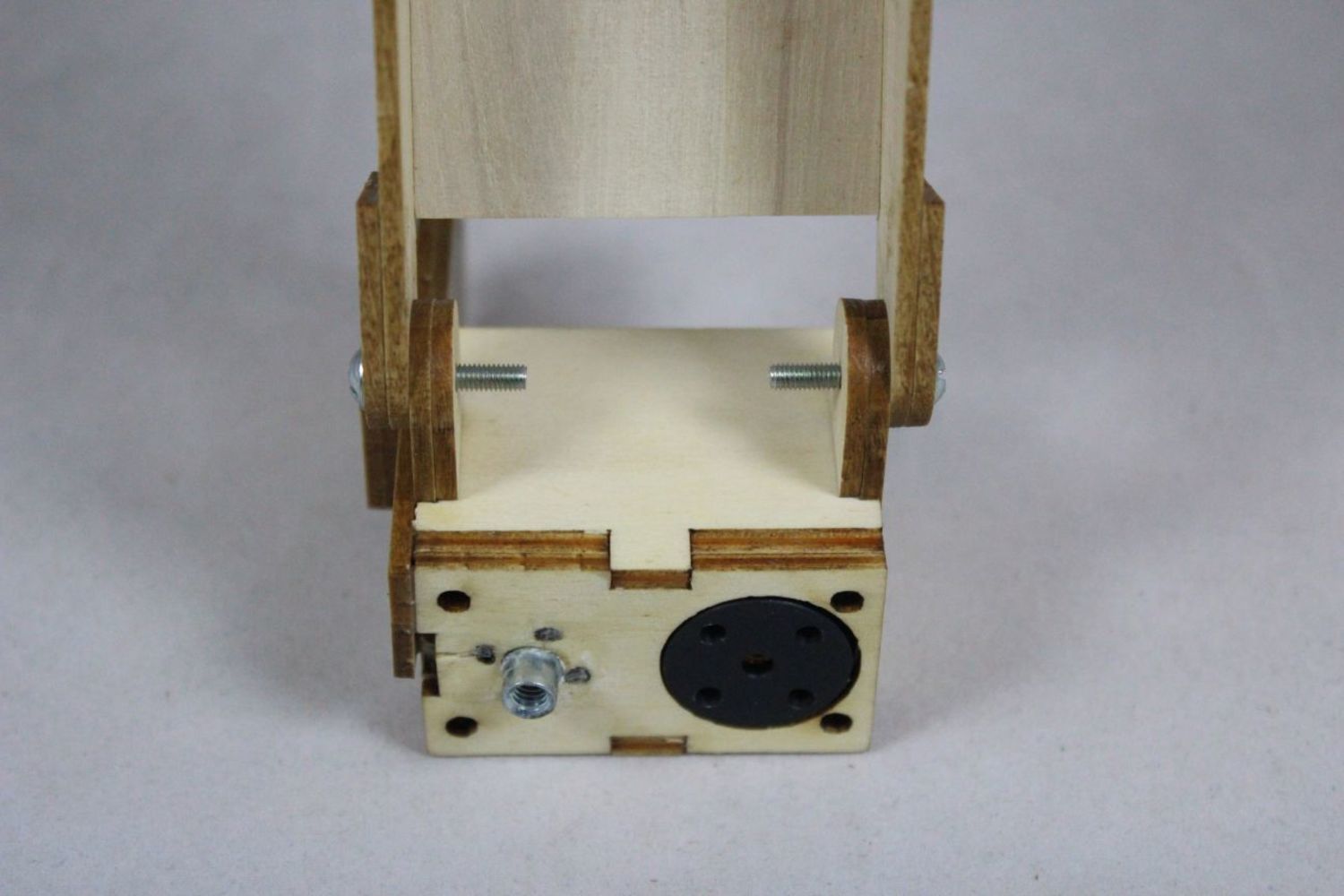
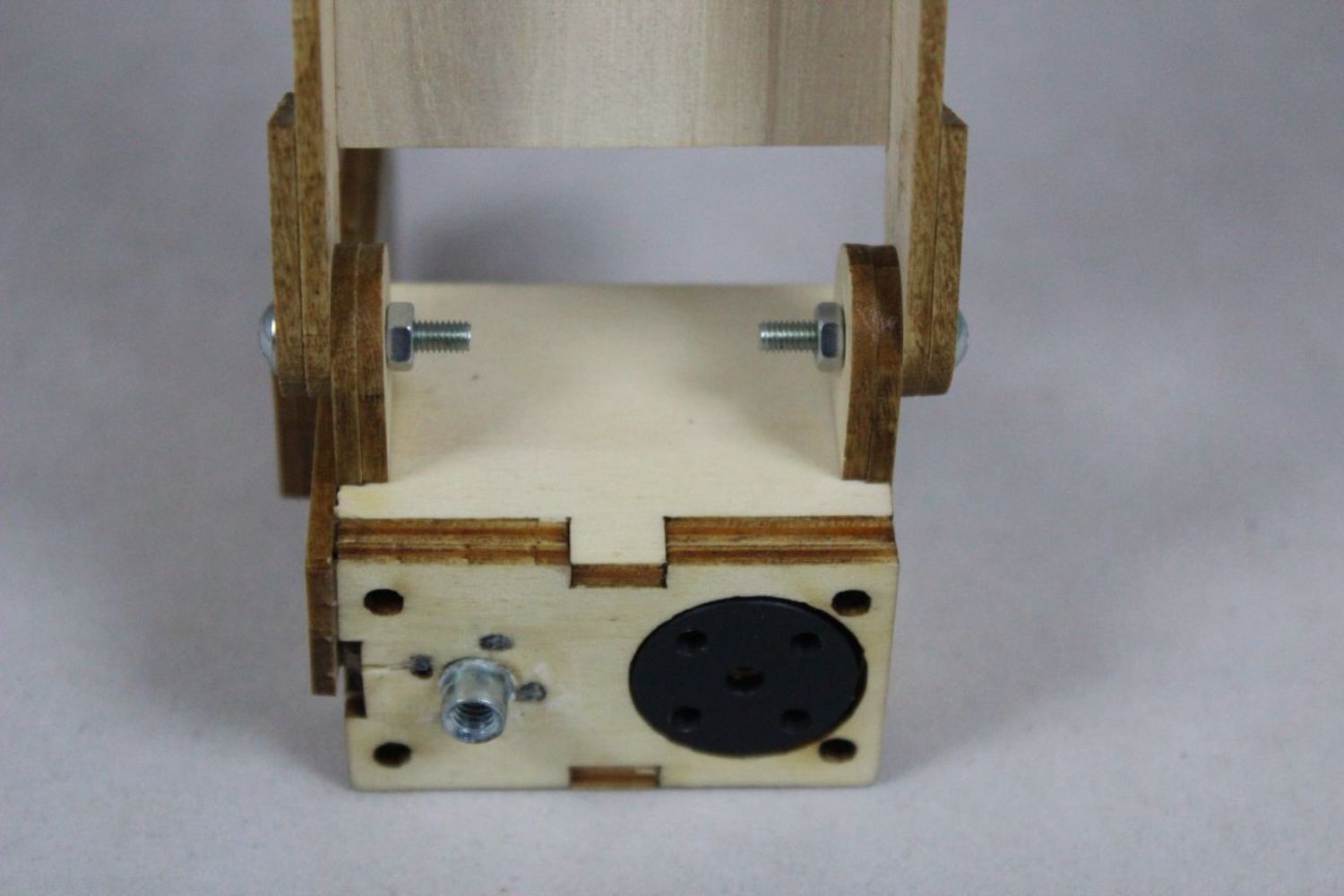
Připravte si díly pro stavbu držáku serva. Díl B2 s předem naklepnutou maticí dostanete od vedoucích.

14
Vezměte díly B1 a B2.
15
Slepte je dle obrázku.

16
Připravte si servo číslo 2 (z rozsahu ID 0-2).

17
Vložte jej do slepeného dílu stejně, jako na obrázku. V dalších krocích ponechejte servo na tomto místě. Díly v okolí serva domáčkněte až přímo na něj.

18
Pohled shora.

19
Přilepte díl B3 jako na fotce.

20
Na stranu s velkým kruhovým výřezem na dřevěném dílku přilepte nižší bočnici.

21
Přilepte druhý díl B3.

22
Přilepte vysokou bočnici ke straně s náklepnou maticí.

23
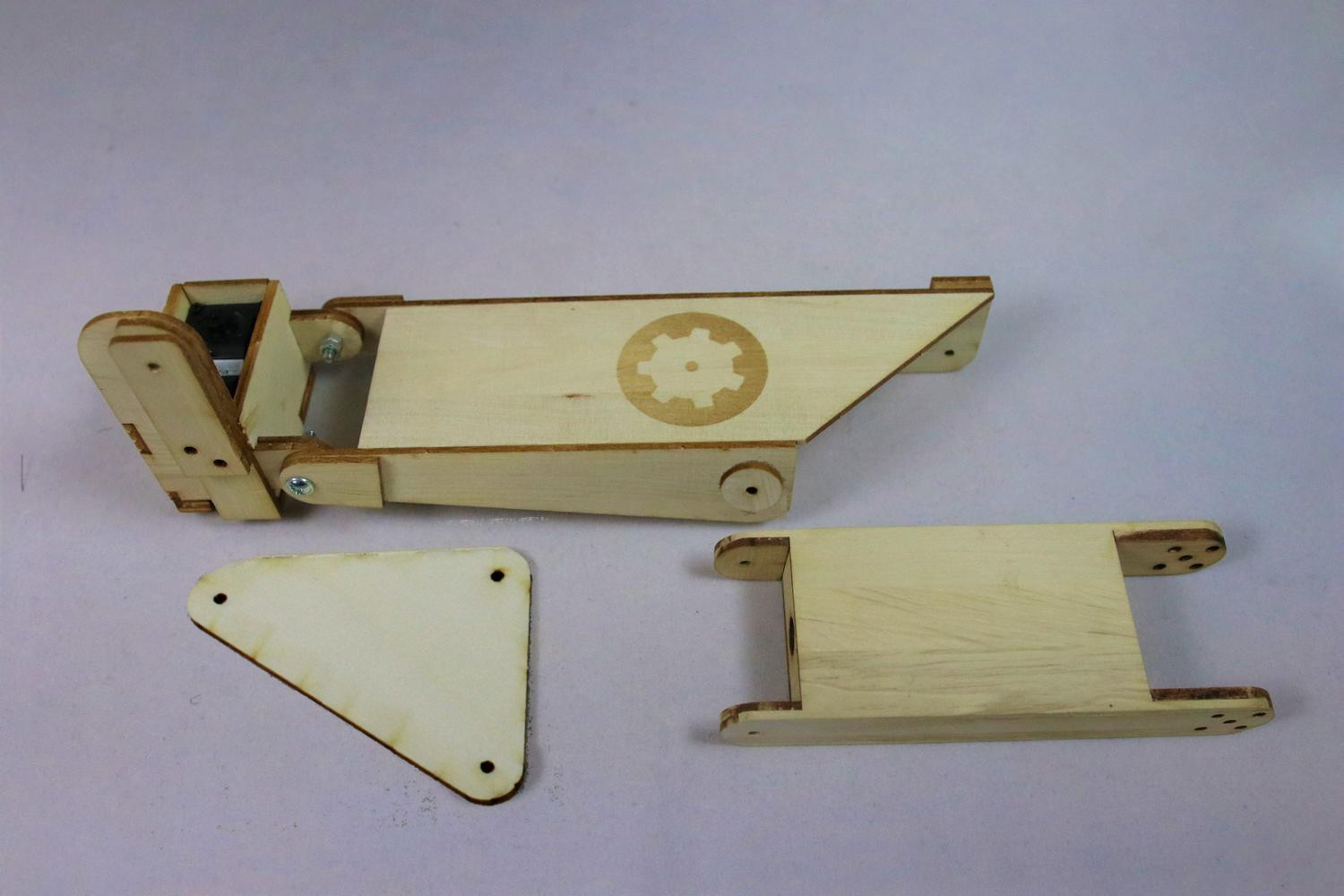
Výsledný díl.
24
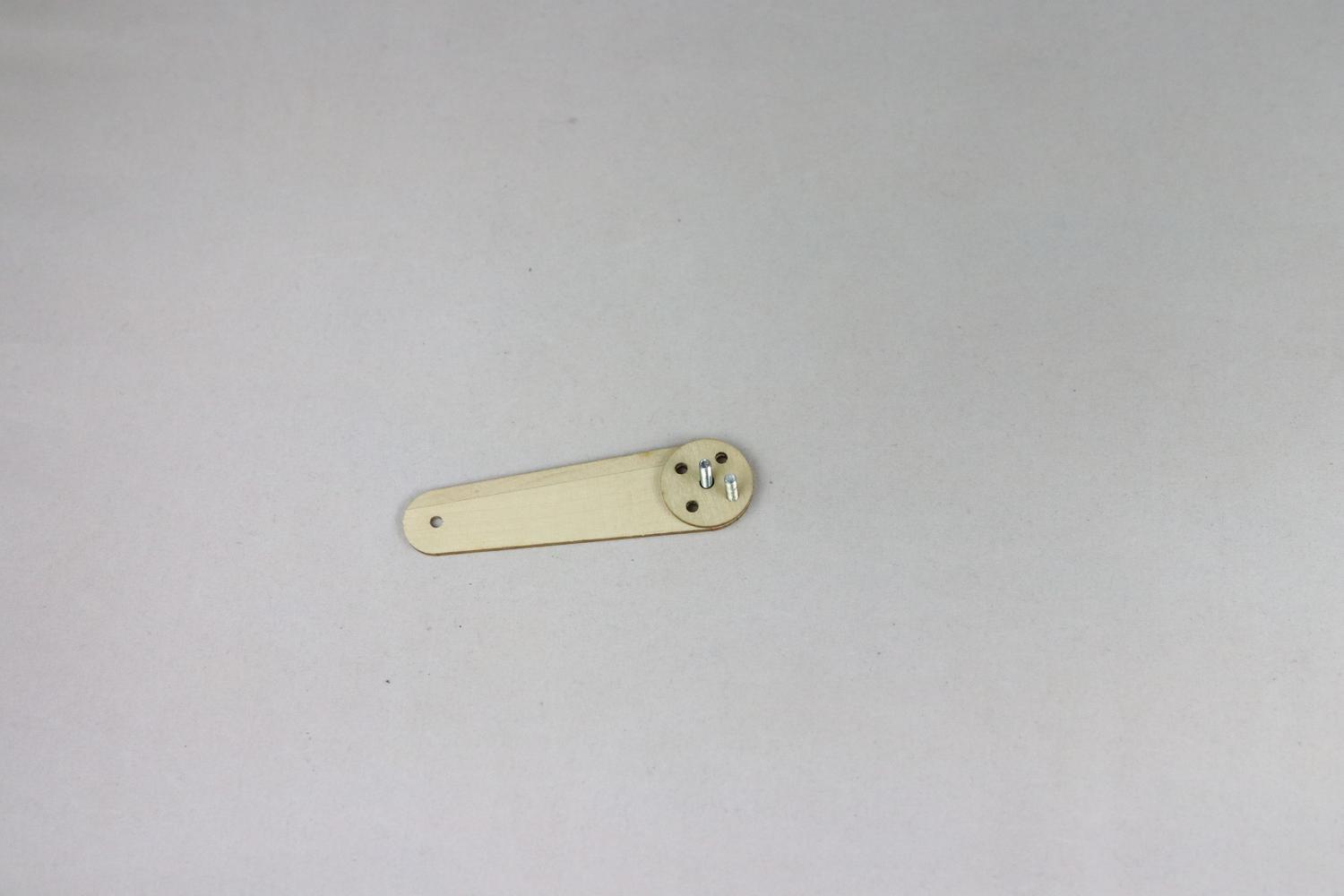
Připravte si díly pro upevnění táhla.

25
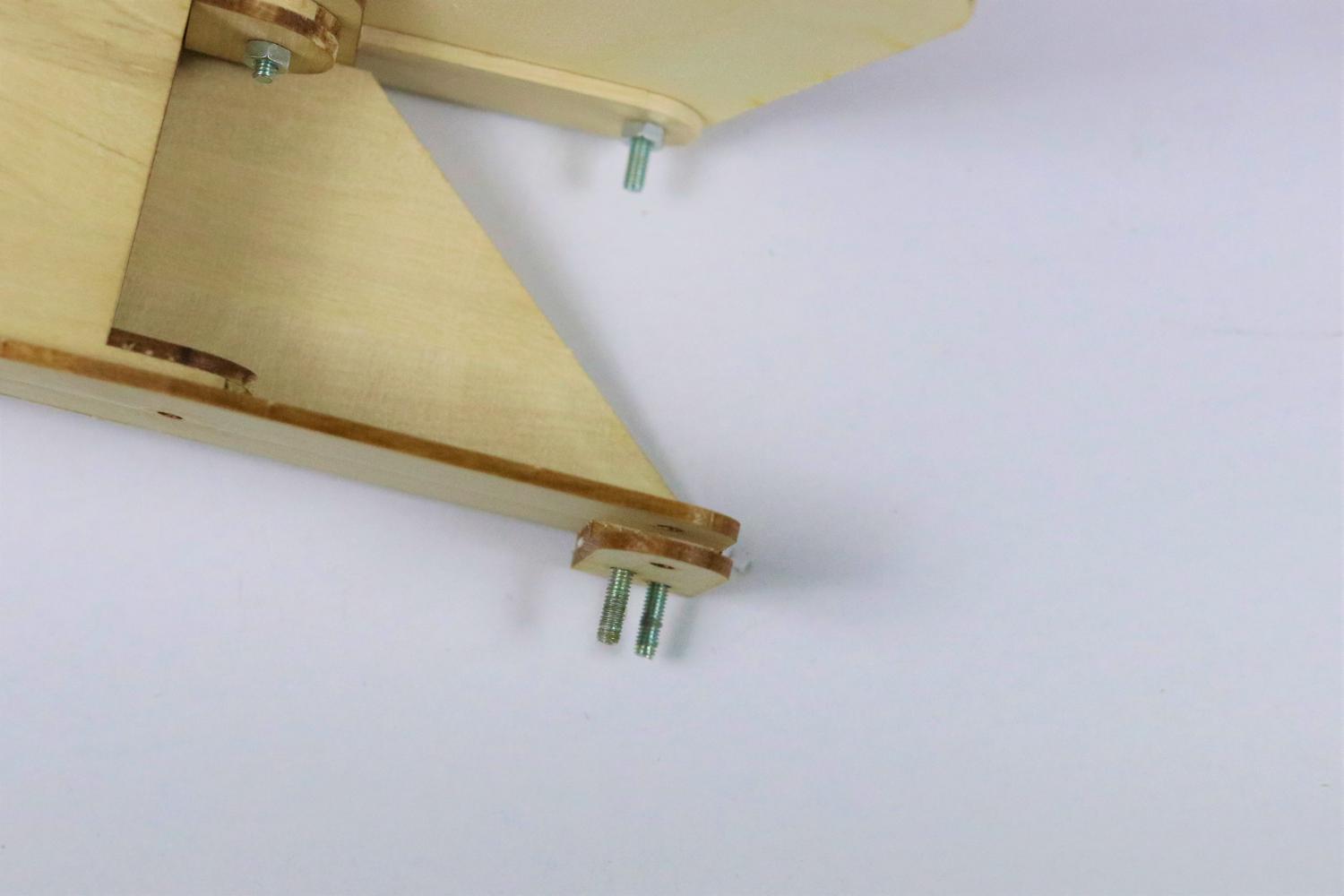
Dle obrázku přilepte podlouhlý díl. Pro získání souosých otvorů si pomožte šroubkem.

26
Jako další přilepte čtvercový díl. Využijte dvou šroubků, pro srovnání děr.

27
Nakonec přilepte díl se třemi otvory. Opět využijte šrouby, otvory musí být souosé!

28
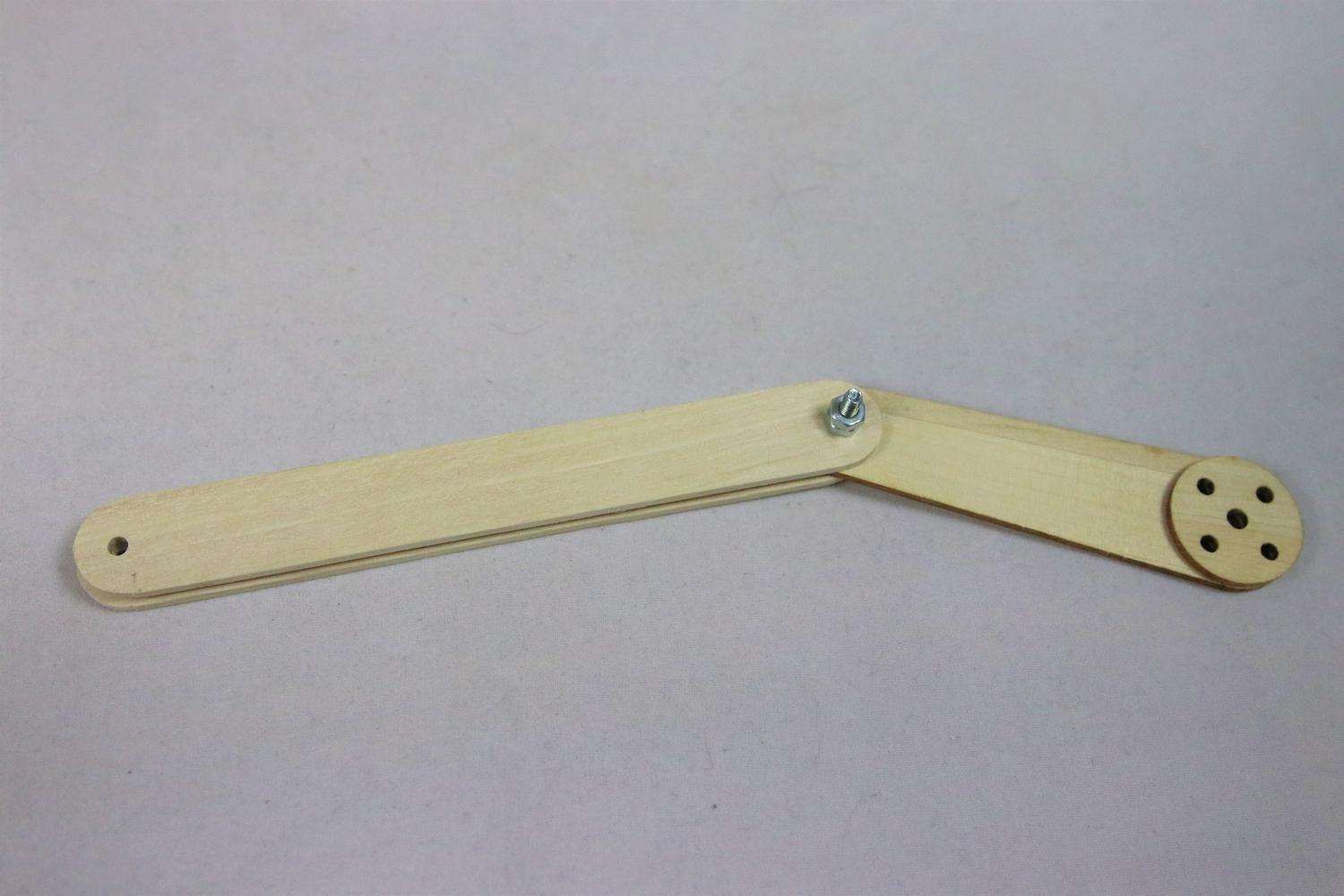
Hotový držák serva.

29
Připravíme si dva dílky na obrázku.
30
Přilepíme je na packy držáku serv z VNITŘNÍ strany, viz. fotka.

31
Připravte si díly na stavbu horní části ruky.
32
Slepte dlouhý díl s prostředním tak, aby byly na sebe kolmé. Pomožte si hliníkovou kostkou pro udržení přesného pravého úhlu.
33
Připevněte dolní díl ruky šroubem.

34
Naneste lepidlo tak, jak je na obrázku. Pohněte spodním dílem podél osy šroubu až nahoru.

35
Přilepte krátký díl. S pomocí šroubku si srovnejte otvory s dolním dílem ruky a opřením kompletu o desku stolu díl srovnejte.

36
Připravte si tyto dva díly.

37
Přilepte je s pomocí šroubků z venku na přesahující konce boků.

38
Totéž zopakujte i na opačné straně.

39
Připravte si díly pro připojení táhla.
40
Nejdříve přilepte čtvereček se dvěma otvory z vnější strany na dlouhý díl horní části ruky. S pomocí šroubků si srovnejte otvory.
41
Dále přilepte vyšší dílek se třemi dírami.
42
Pohled shora.
43
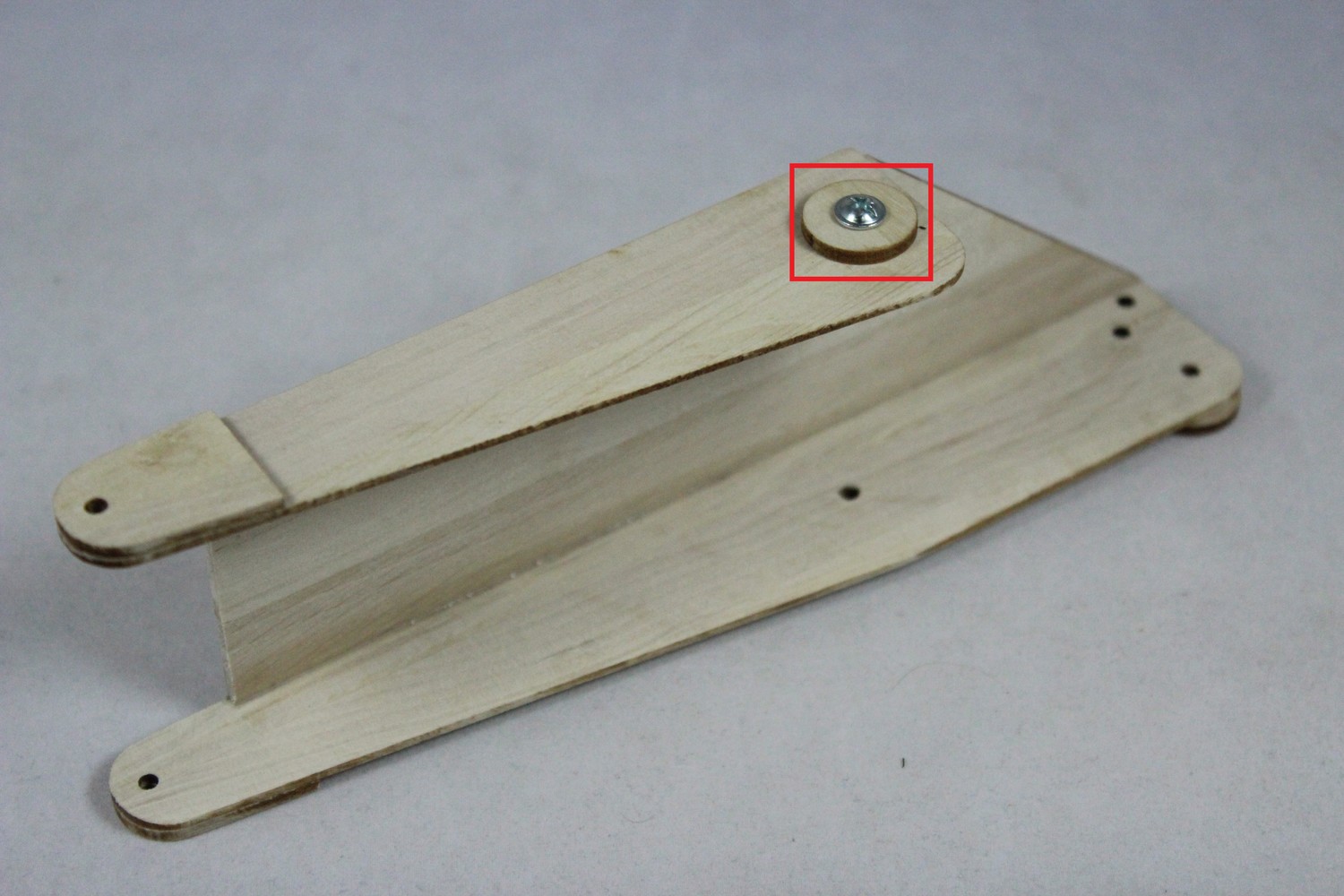
K hornímu dílu ruky přilepte dřevěný kroužek, jak vyznačeno na obrázku. K přesnému vlepení si pomožte M3 šroubem. Dbejte, aby léta dřeva kolečka byla kolmá na léta horního dílu.

44
Druhý kroužek přilepte za pomocí M3 šroubu na dlouhý díl horní části jako na obrázku. Dbejte, aby léta dřeva kolečka byla kolmá na léta dlouhého dílu.

45
Připravte si tyto dva díly.
46
Do dvou otvorů strčte šrouby a díly slepte.

47
Výsledek.

48
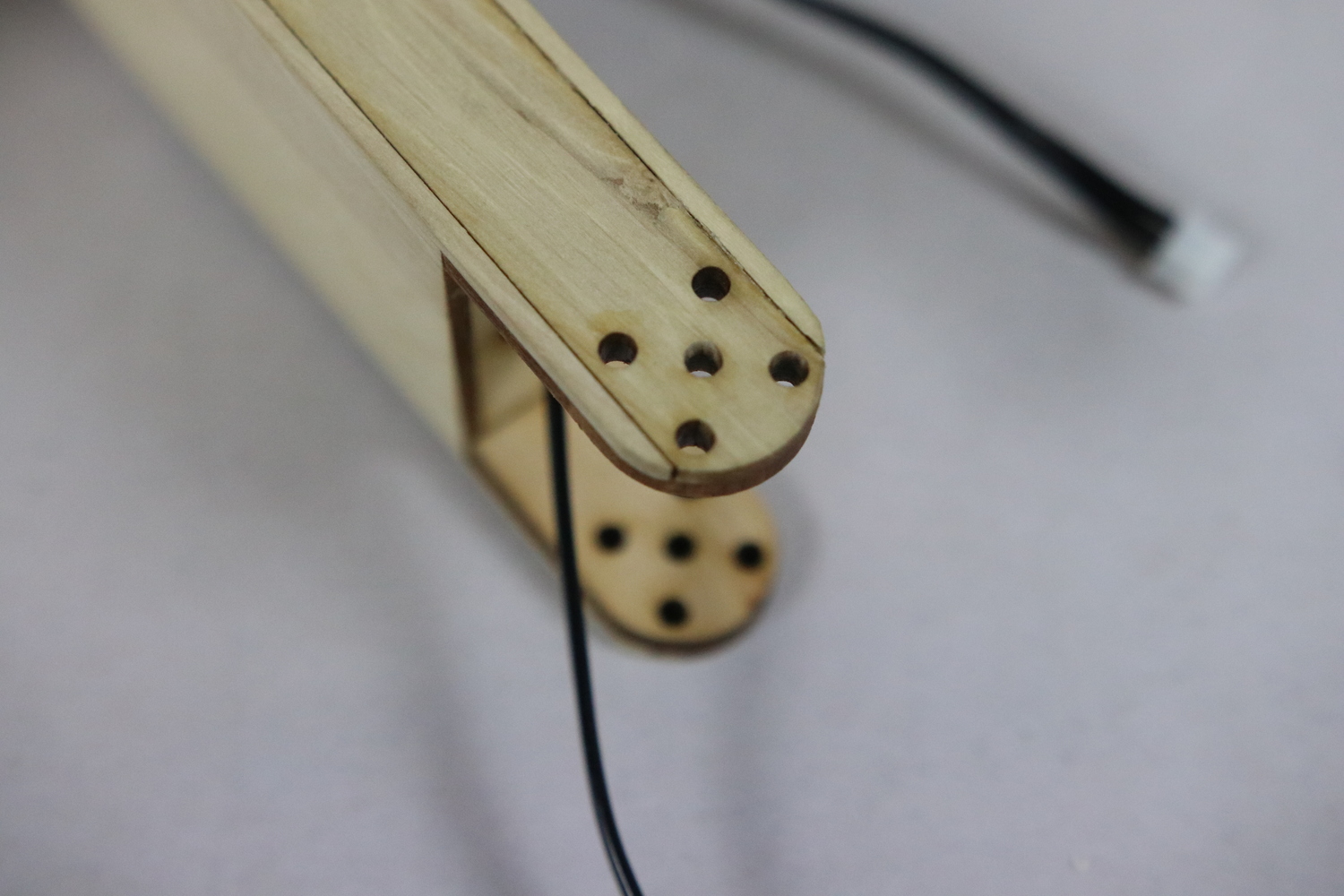
Konstrukci rozložte a připravte si šest táhel.

49
Dále budete potřebovat devět šroubků M3x16 a osmnáct matic M3.
50
S pomocí šroubků připevněte držák serva k hornímu dílu ruky.
51
Na přidané šrouby našroubujte matice. Matice nedotahujte, aby se mohly části ruky vůči sobě otáčet.

52
Ke každé matce našroubujte další matku a dotáhněte vůči původní matce (kontra). K tomu použijte dvoje kleště. Tímto jsou matice fixovány. Ověřte, že se mohou části ruky vůči sobě volně otáčet. (S výhodou je zde možné použít jednu samojistnou matku místo 2 kontramatek.)
53
Připravte si horní a dolní část ruky a díl TA2 s přilepenou kruhovou podložkou.

54
Spojte dohromady díl TA2, horní a dolní část ruky pomocí šroubku M3.

55
Šroubek vložte i do otvoru na druhé straně.

56
Každý šroub opět zafixujte matičkami (ke každému dvě). První matku vůči dřevu neutahujte, nechte prostor na pohyb ramene. Druhou matku dotáhněte vůči první matce (kontra), aby byly obě matky fixovány. Zkontrolujte, že se mohou dřevěné části ramene vůči sobě volně otáčet.
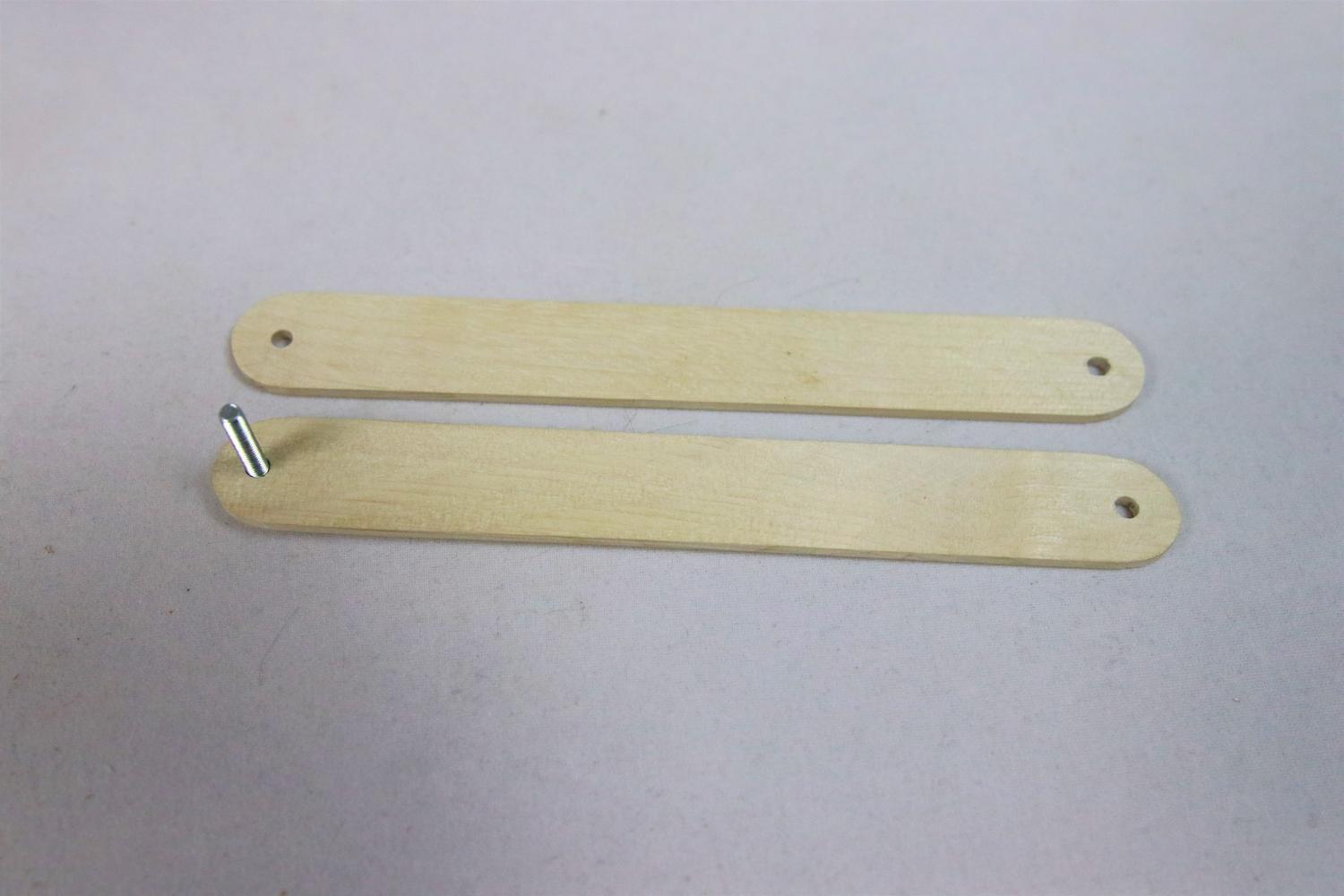
57
Připravte si dvě táhla a do jednoho z nich vložte šroubek.

58
Táhla připevněte na příslušné místo na držáku serva (viz. fotka).
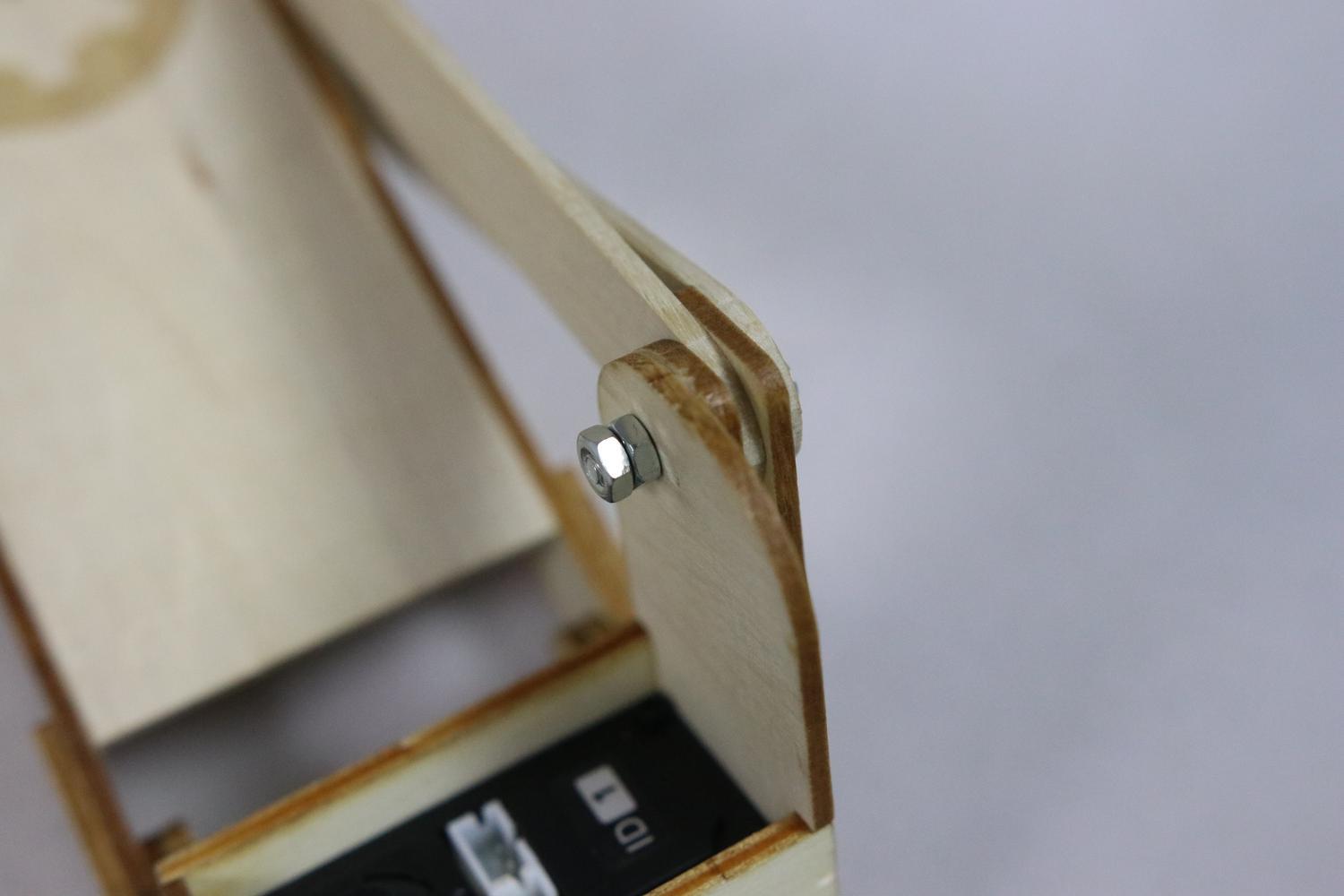
59
Šroub zafixujte dvěma maticemi (kontra).
60
Pohled shora.

61
Volný konec dvojitého táhla připevněte šroubem ke správnému otvoru dílu TA2 a opět zafixujte dvěma maticemi.

62
Ke zbývajícímu volnému otvoru na dílu TA2 připevněte stejným způsobem další dvojité táhlo.

63
Připravte si díly na fotce. Do jednoho z táhel opět vložte šroub.
64
Díly spojte dohromady.

65
Vzniklý díl připevněte k horní části ruky.
66
Kabel serva 2 protáhněte dle obrázku a zapojte do libovolného konektoru serva.
67
Připravte si díly na klepeta.

68
Vždy slepte dva díly dohromady pro zvýšení pevnosti.
69
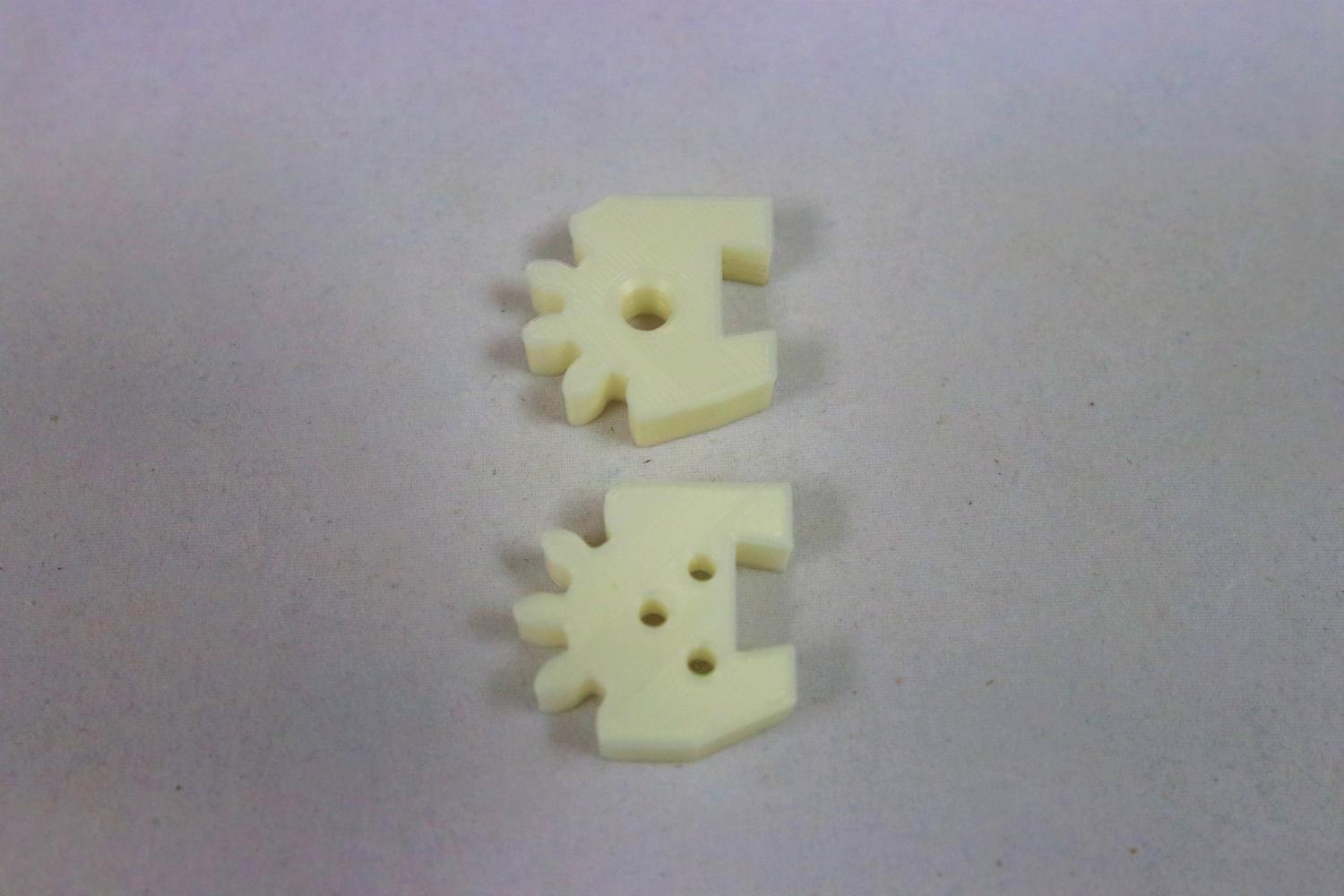
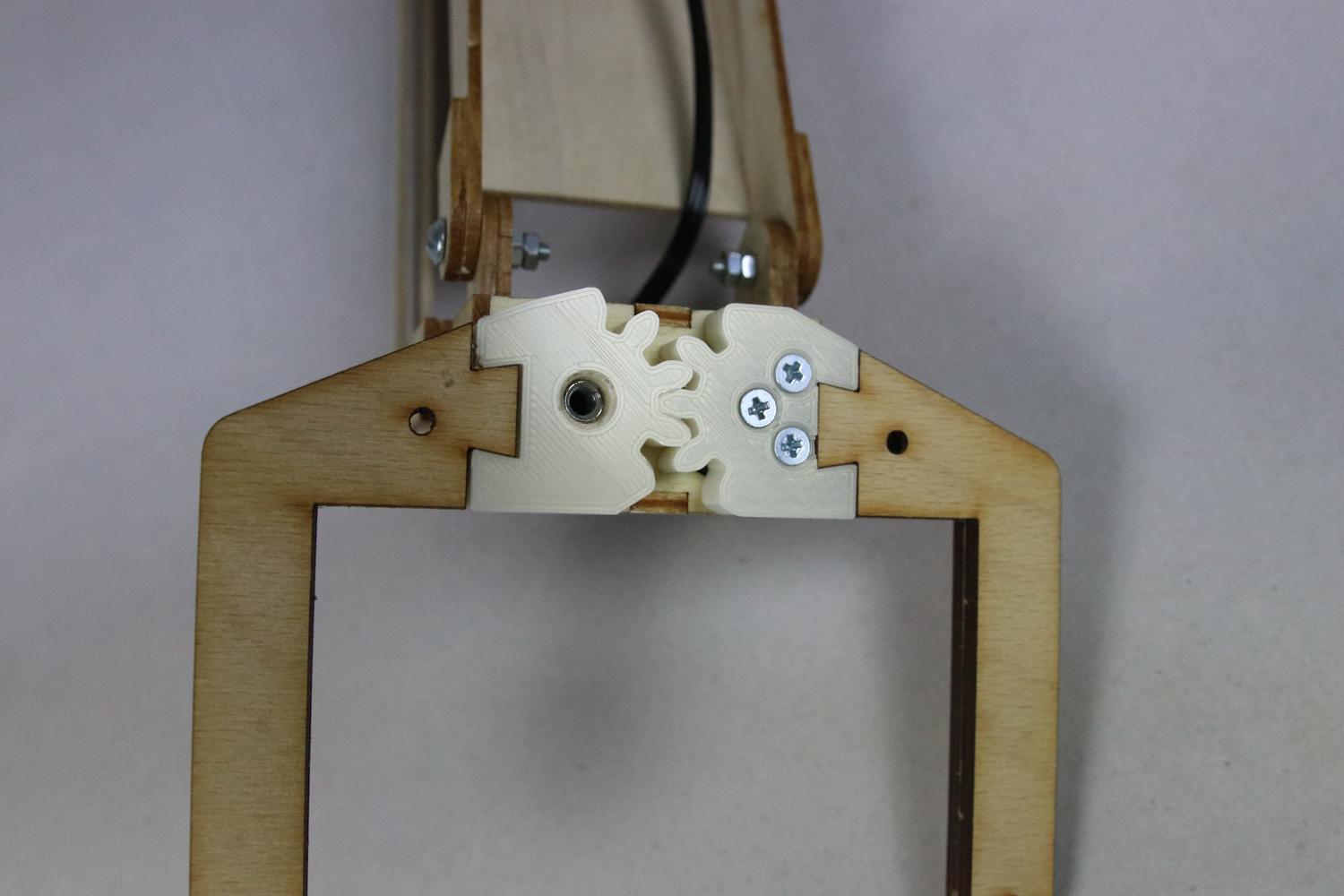
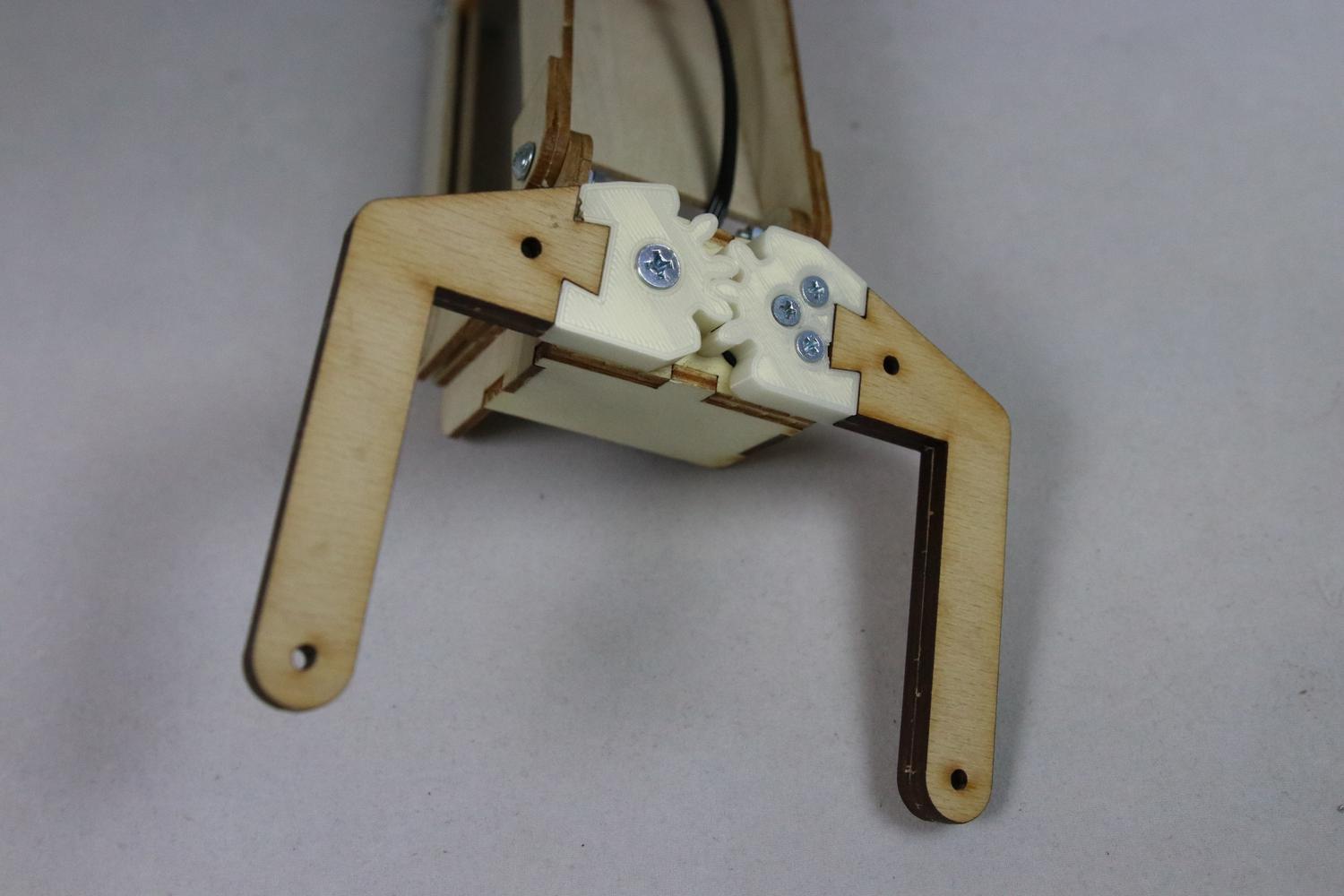
Připravte si díly tištěné na 3D tiskárně.
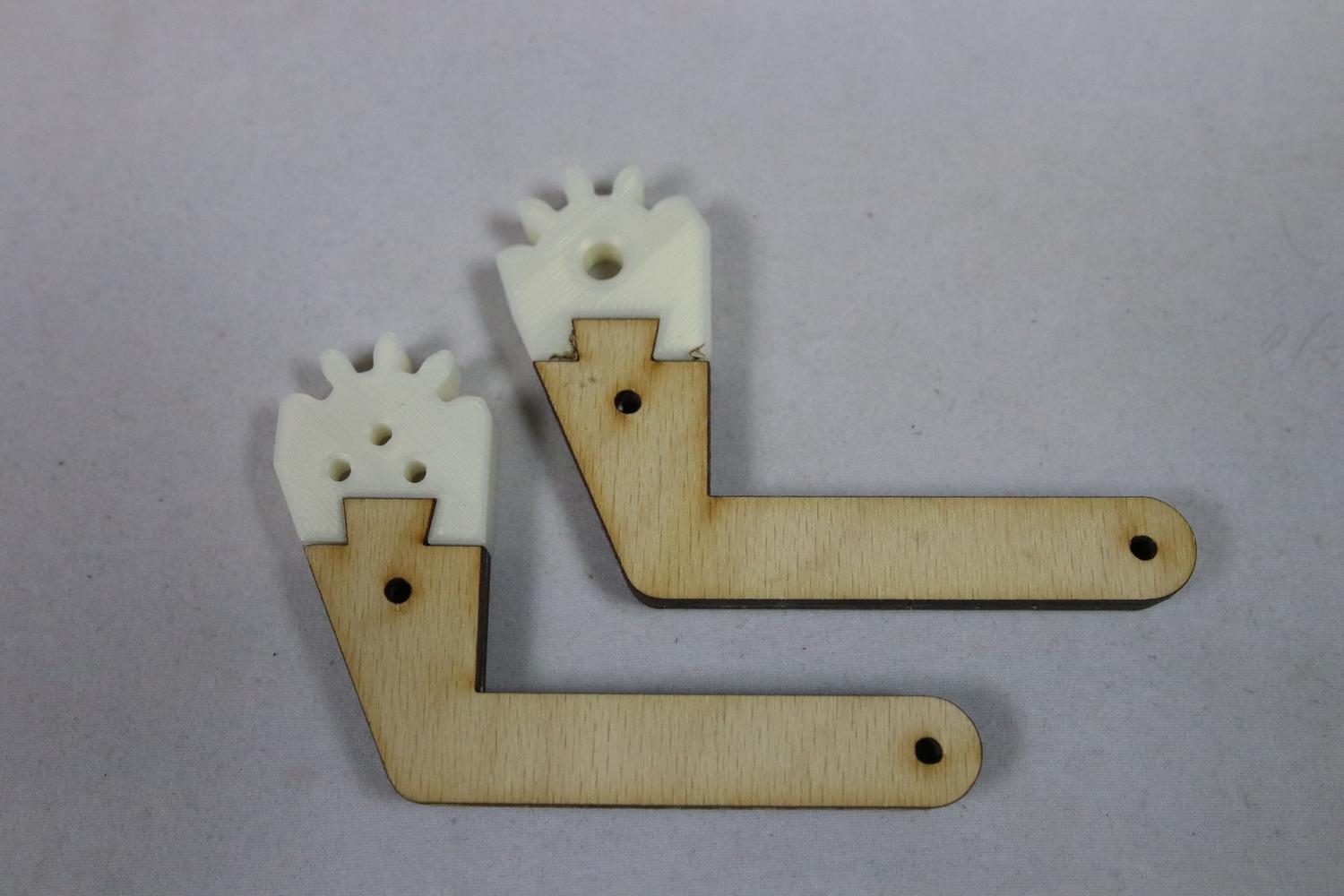
70
Nasaďte je na dřevěné části tak, jako na fotografii a zakápněte ze všech stran vteřinovým lepidlem (ideálně řidkým).

71
Na ozubený díl klepeta přišroubujte kovové kolečko serva pomocí 2 šroubů M3x10.
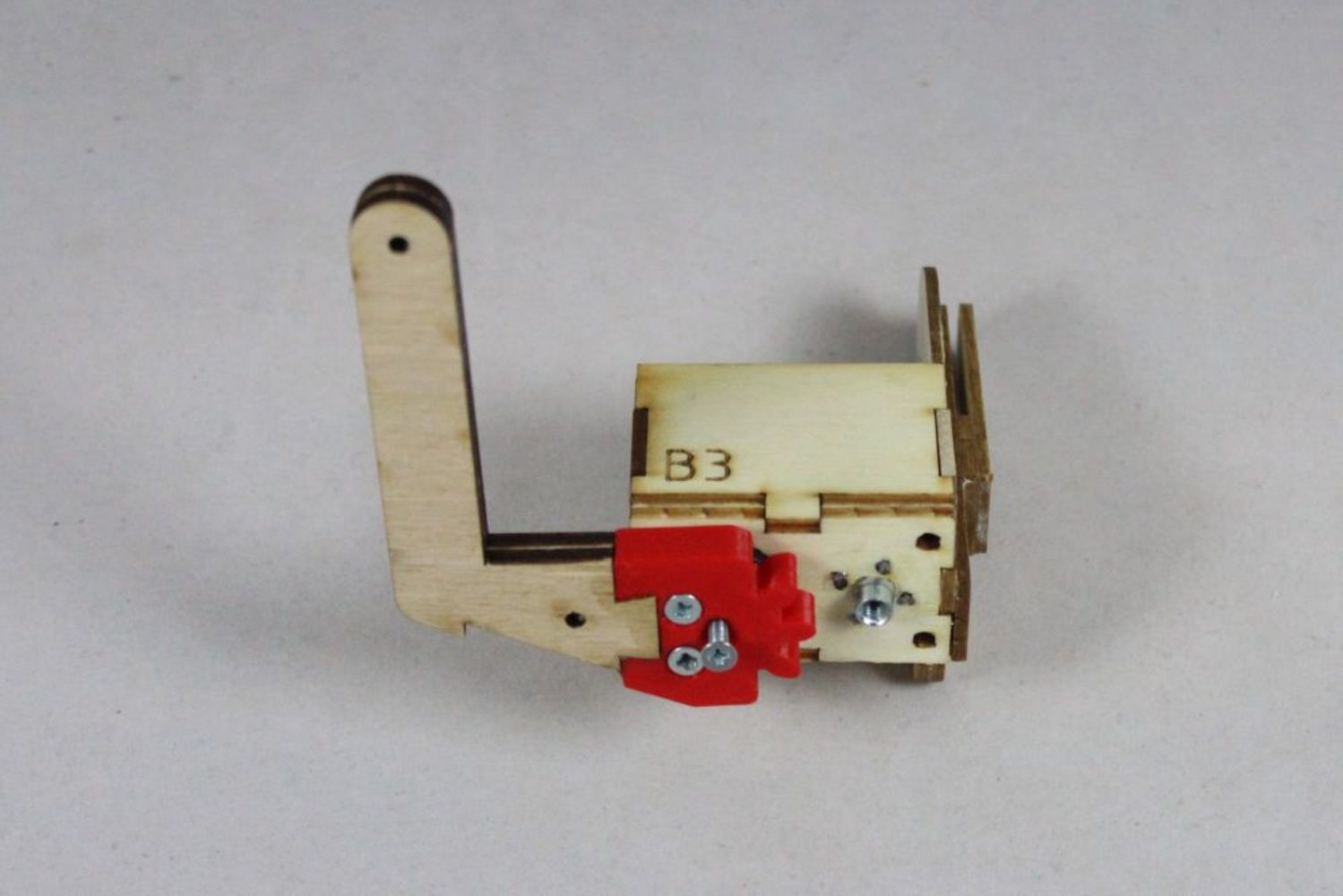
72
Vložte klepeto do mnohohranu serva přesně podle obrázku a utáhněte středovým šroubem M3x12.
73
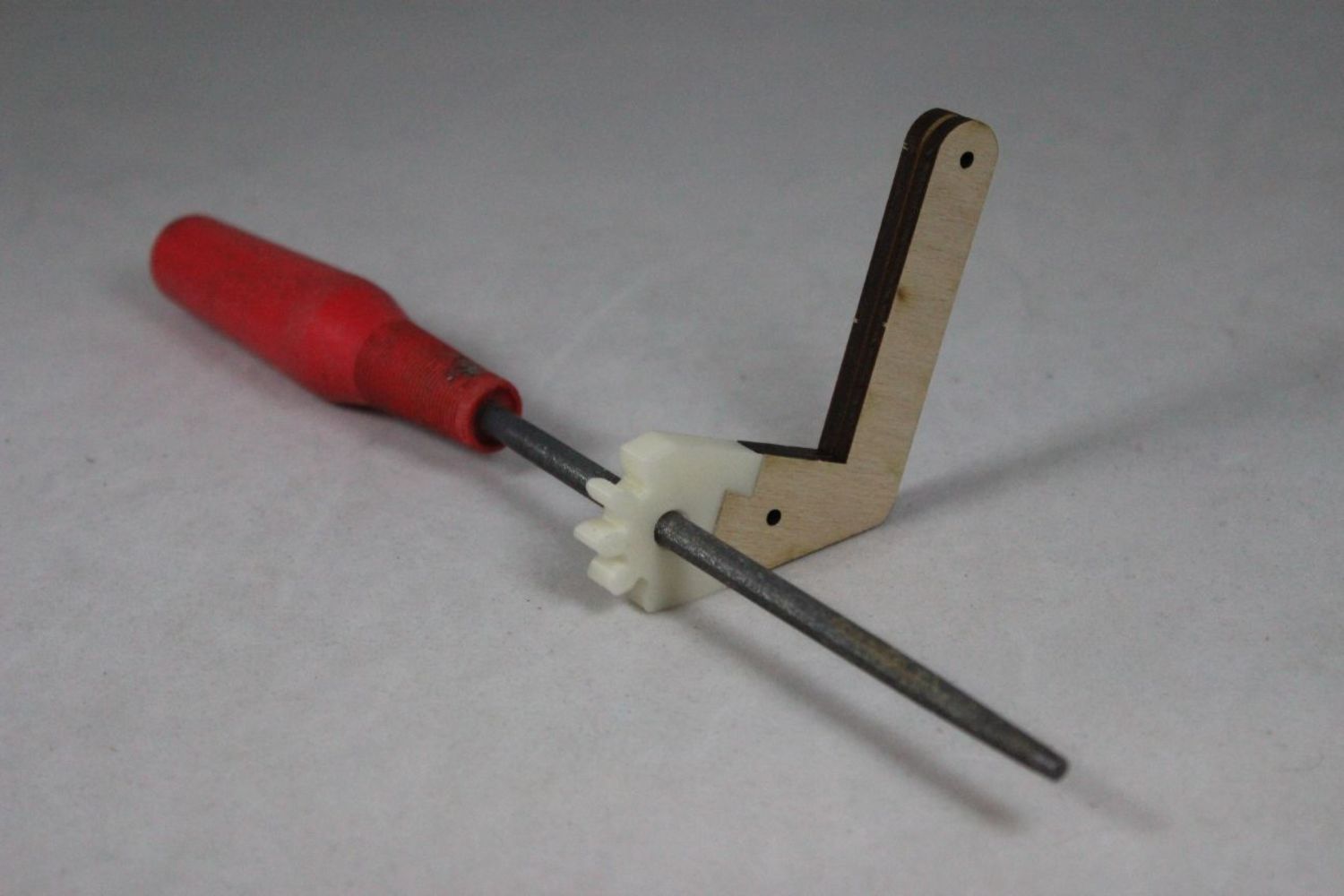
U klepeta s velkým otvorem zvětšete jeho velkou díru v plastové části pilníkem. Vybruste akorát tak, aby bylo možné klepeto nasadit dle následujícího kroku a mohlo se volně otáčet.
74
Na tělo náklepné matice nasaďte klepeto s velkým otvorem.
75
Pomocí šroubu M4x12 klepeto k matici přišroubujte.
76
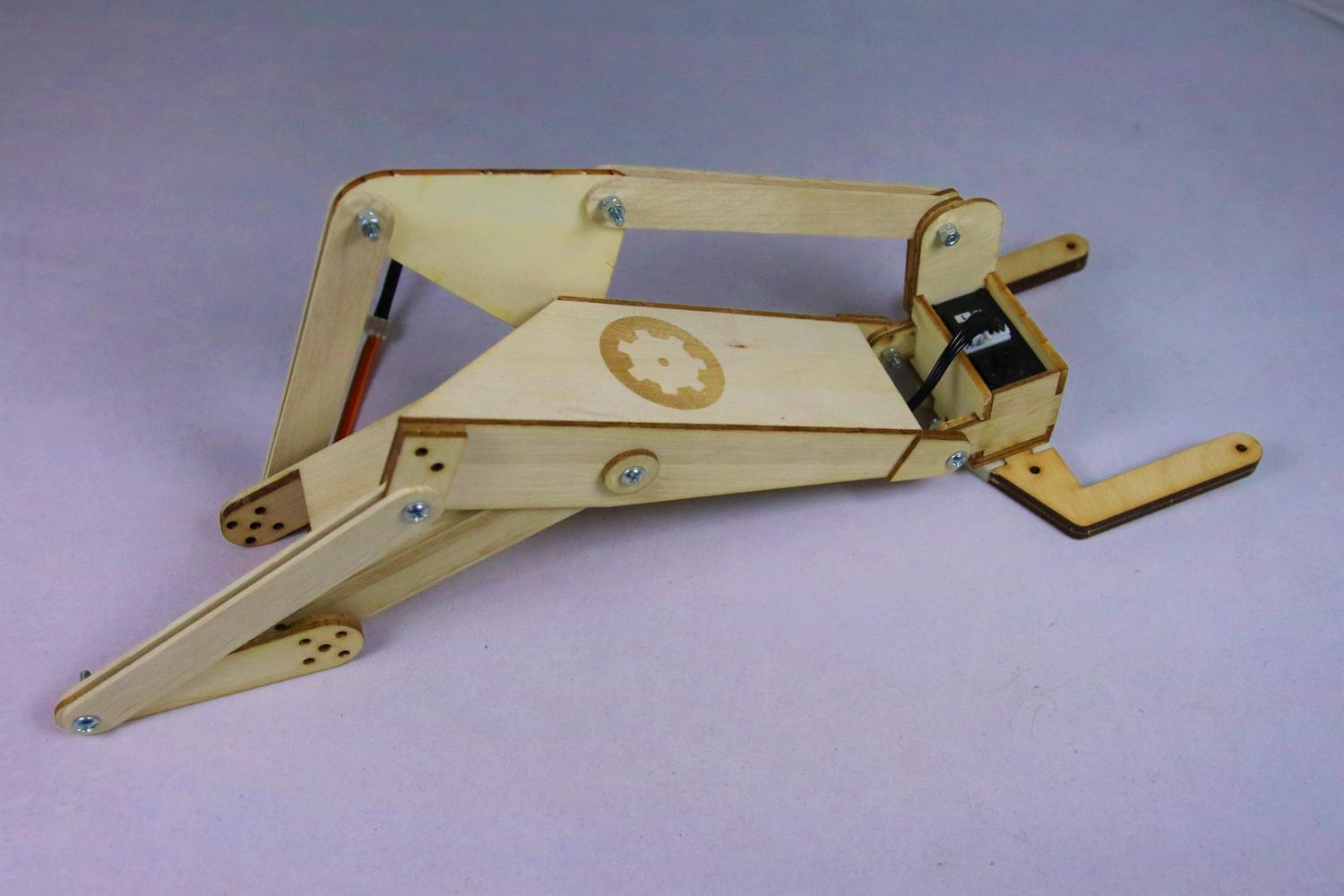
Ruka s oběma klepety.
77
Nyní vezměte dolní část ruky.
78
Vteřinovým lepidlem potřeme okolí děr z vnějších stran dílu (obě strany podle šipek).

79
Všechny díry, do kterých bude přišroubováno servo je třeba zahloubit jako na obrázku. Jsou to díry z obou stran vyobrazeného dílu.
80
Zabruste vteřinové lepidlo z obou stran dílu do hladka smirkem.

81
U dřevěné páky serva 1 ze strany kulatého kolečka zopakujte postup s vteřinovým lepidlem, zahloubením a zbroušením jako v minulých krocích.
82
Serva na výsledné ruce mají tato čísla. Ke stavu na obrázku se dostanete v dalších krocích.
83
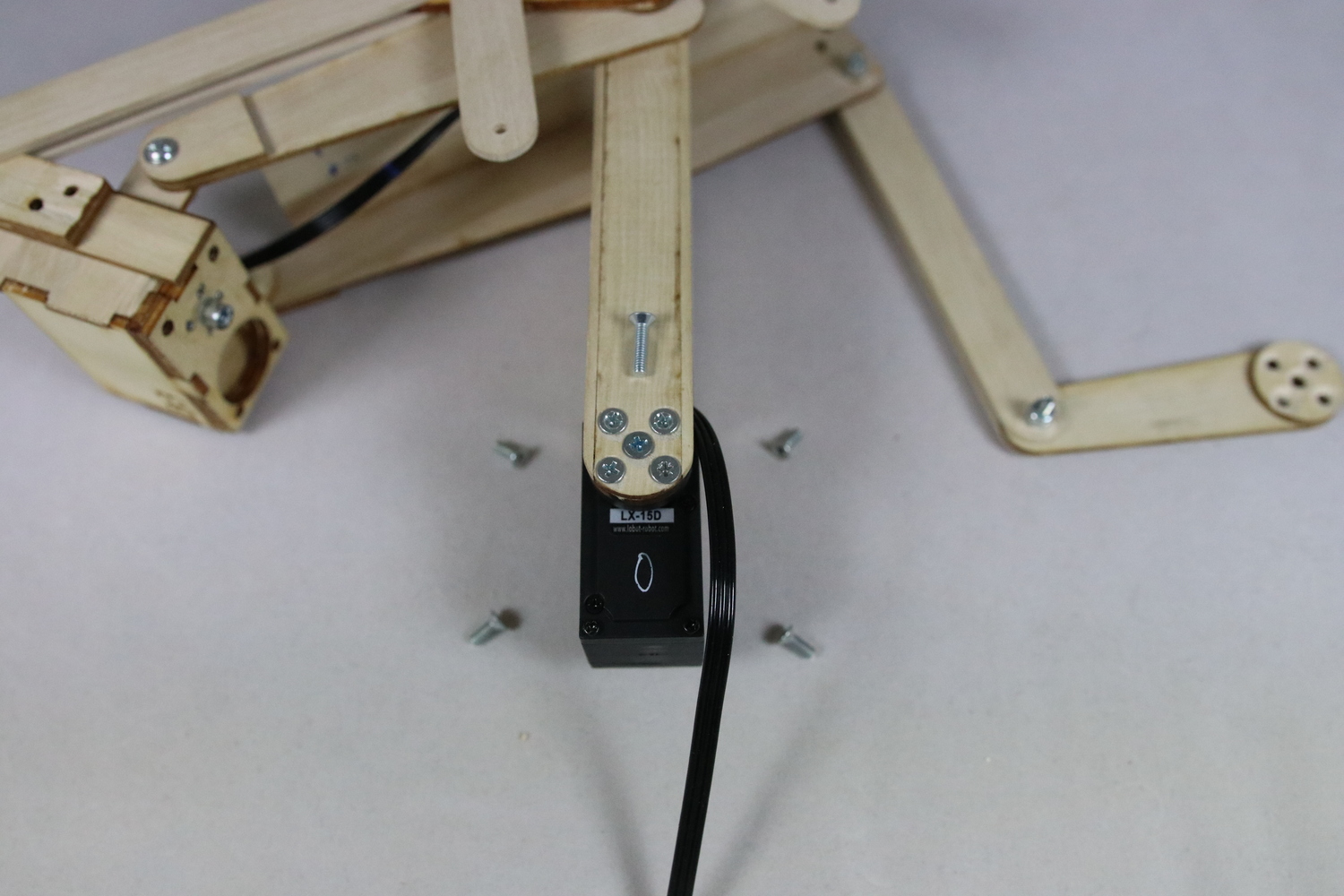
Nyní přišroubujte servo 0 přesně jako na obrázku rovnoběžně s dřevěným dílem. Cedulka s názvem serva “LX-15D” musí směřovat nahoru. Do prostředního otvoru patří šroub M3x12, do zbylých M3x8.
84
Přišroubujte i druhou stranu serva. Zde se již prostřední šroub nedává.
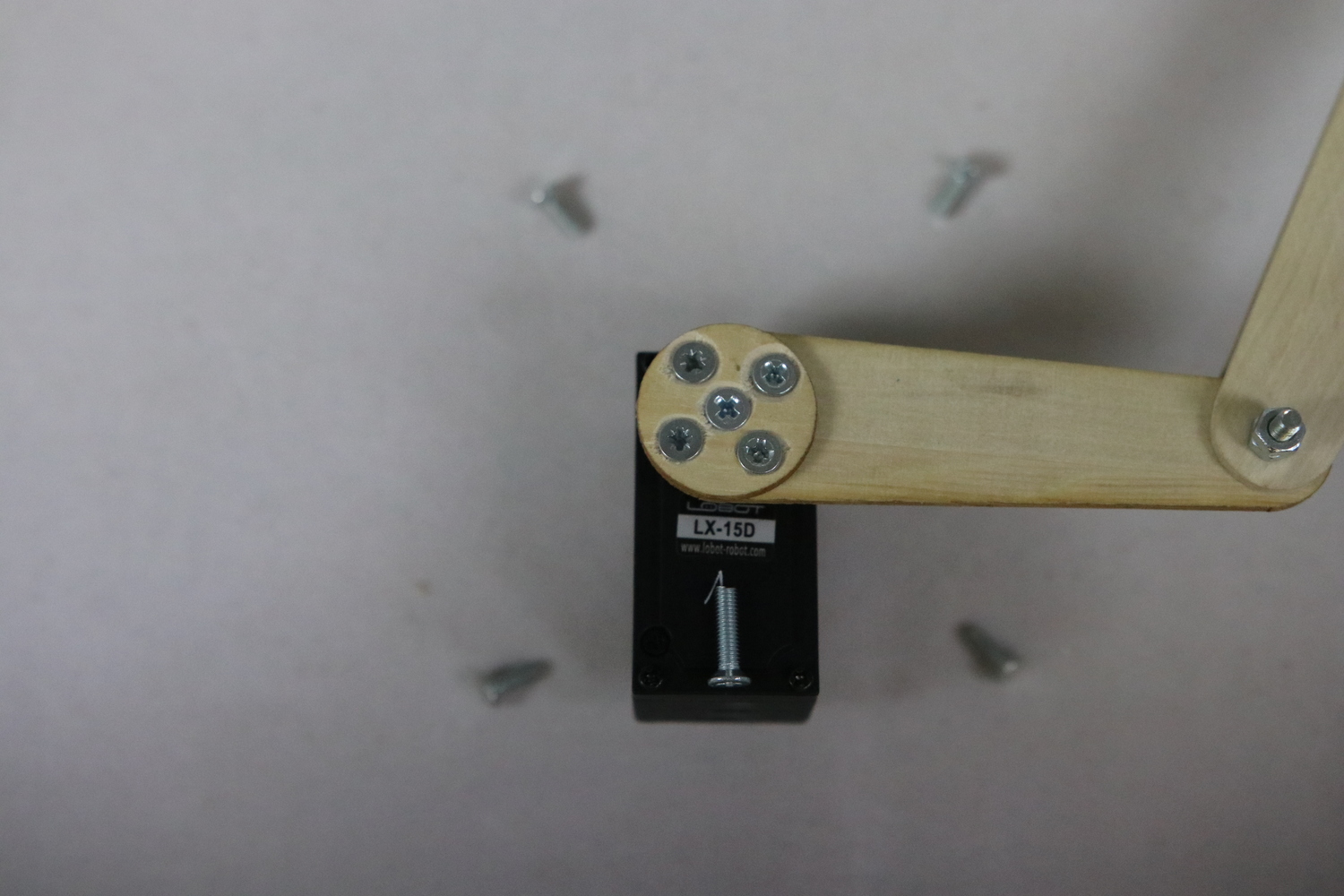
85
Nakonec přišroubujte servo 1 k dřevěné páce jako na obrázku. Páka musí být přišroubována na straně serva, která se neotáčí volně. Do prostředního otvoru patří šroub M3x12, do okrajových M3x8.
Stavba klece
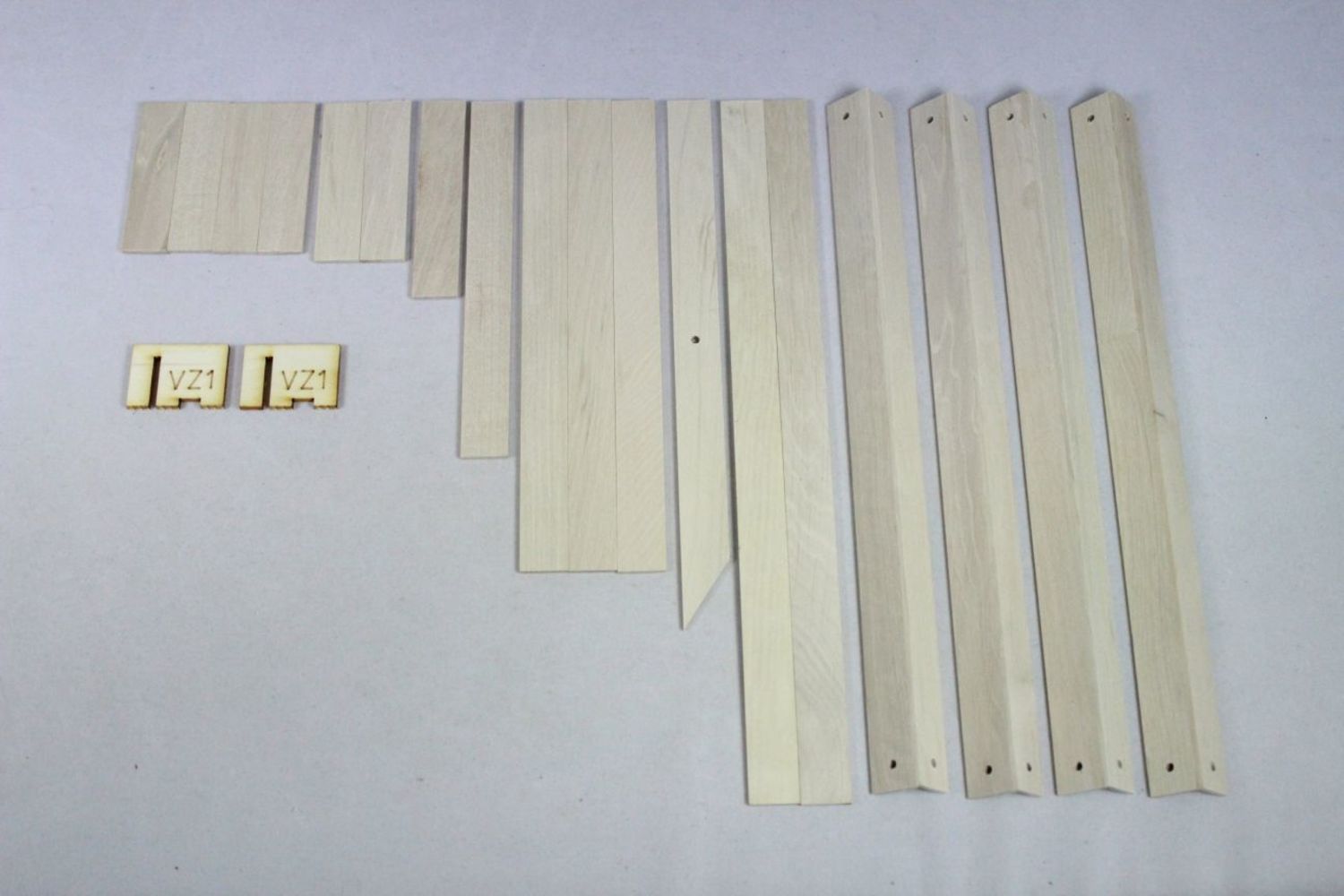
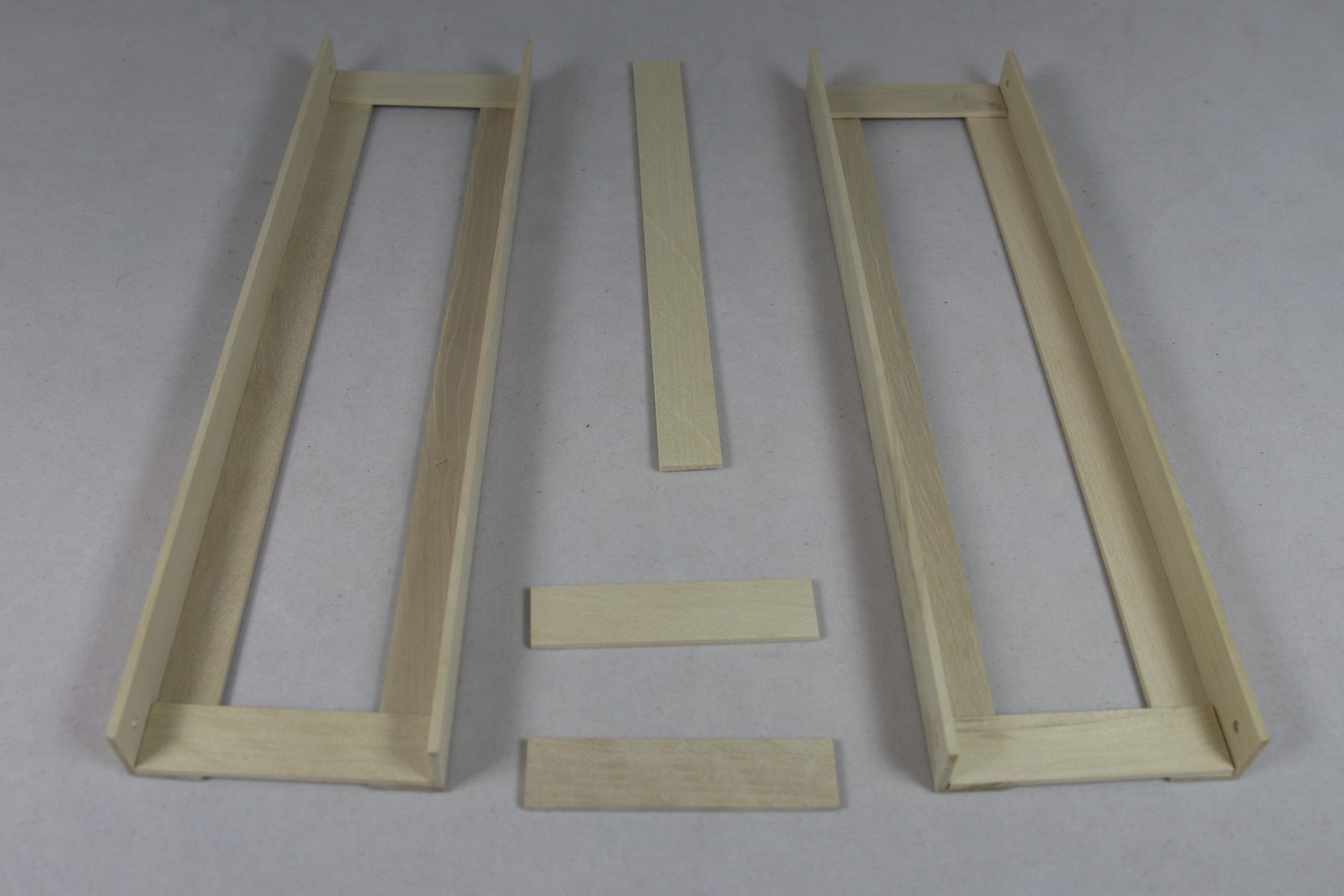
1
Pro sestavení klece kolem roboruky budeme potřebovat: 4 dřívka o délce 64mm, 2 dřívka o délce 68mm, 1 dřívko o délce 82,8mm, 1 dřívko o délce 144mm, 3 dřívka o délce 184mm, jedno dřívko se zkosením, jehož delší strana má 203mm, dvě dřívka v plné délce 261mm, čtyři kusy slepených dřívek do L a dva díly VZ1.
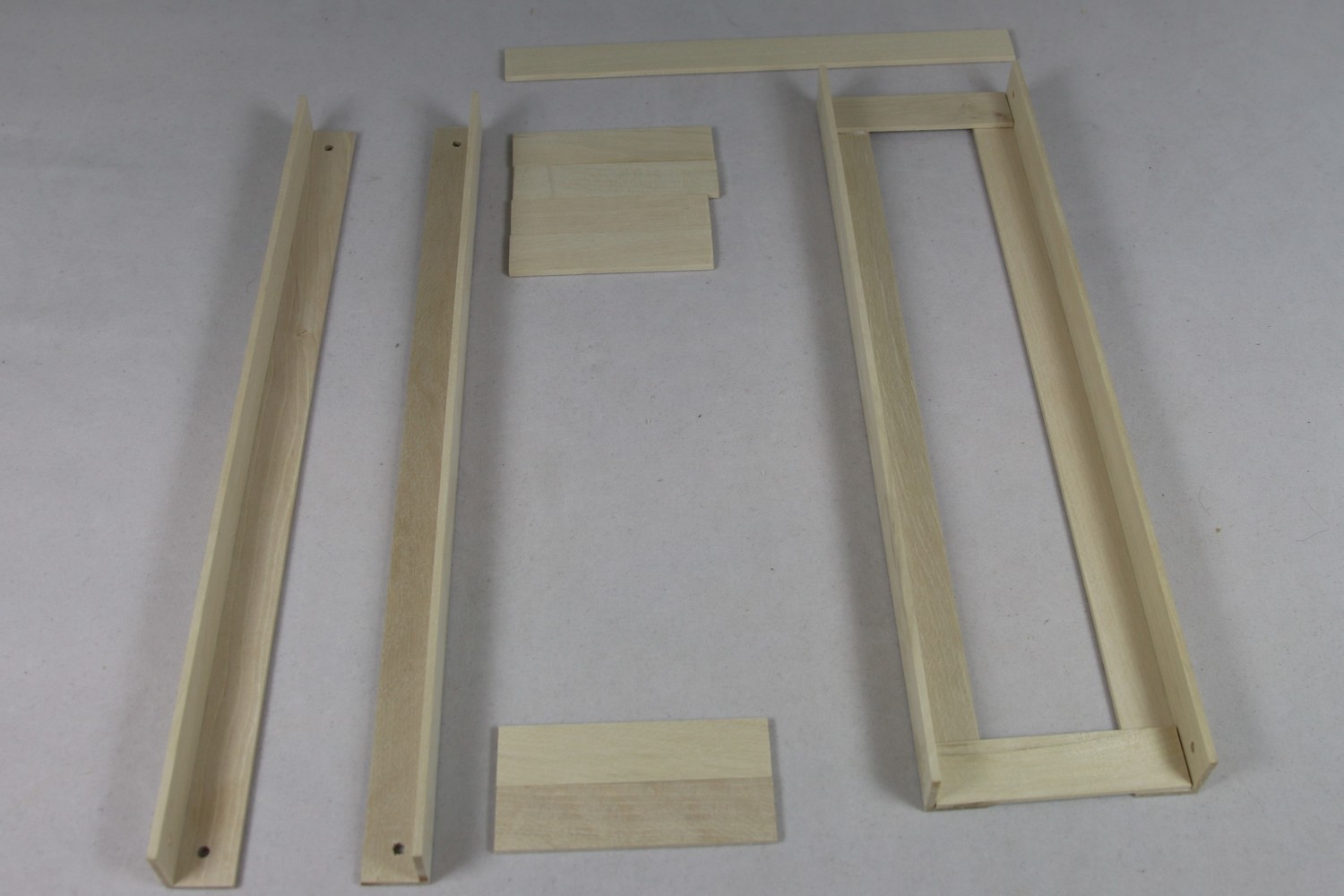
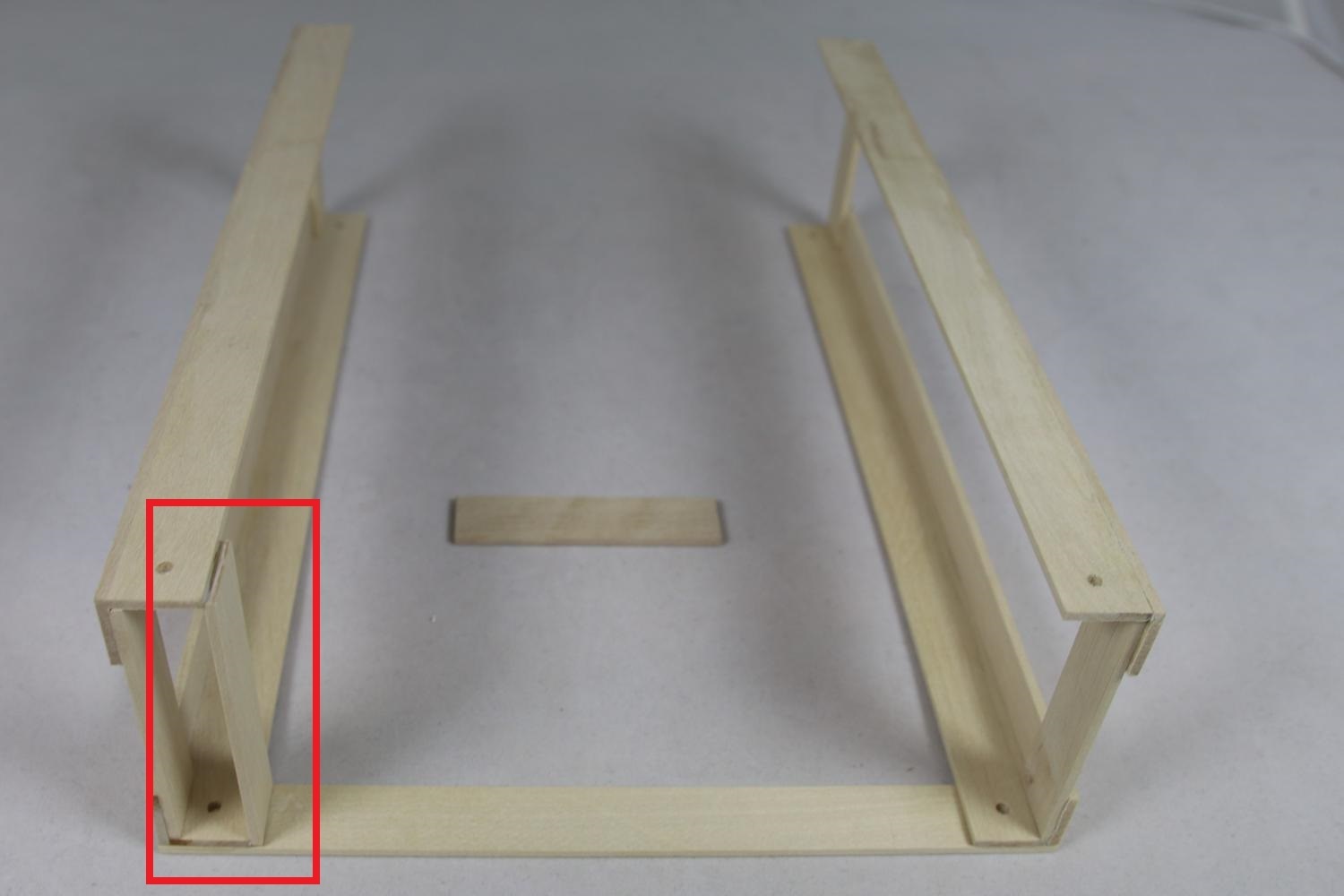
2
Vezmeme dva díly tvaru L a 2 dřívka o délce 64mm a slepíme je tak, aby tvořily obdélník jako na pravo na obrázku.

3
Detail výsledného dílu shora.
4
Stejný postup opakujeme i u druhé sady. Dostaneme tedy dva obdélníky.

5
Nyní potřebujeme jedno 184mm dřívko. Tím z vnější strany spojíme na jedné straně oba obdélníky.
6
Teď vezememe dvě 68mm dřívka. První nalepíme tak jak je ukázáno na obrázku.
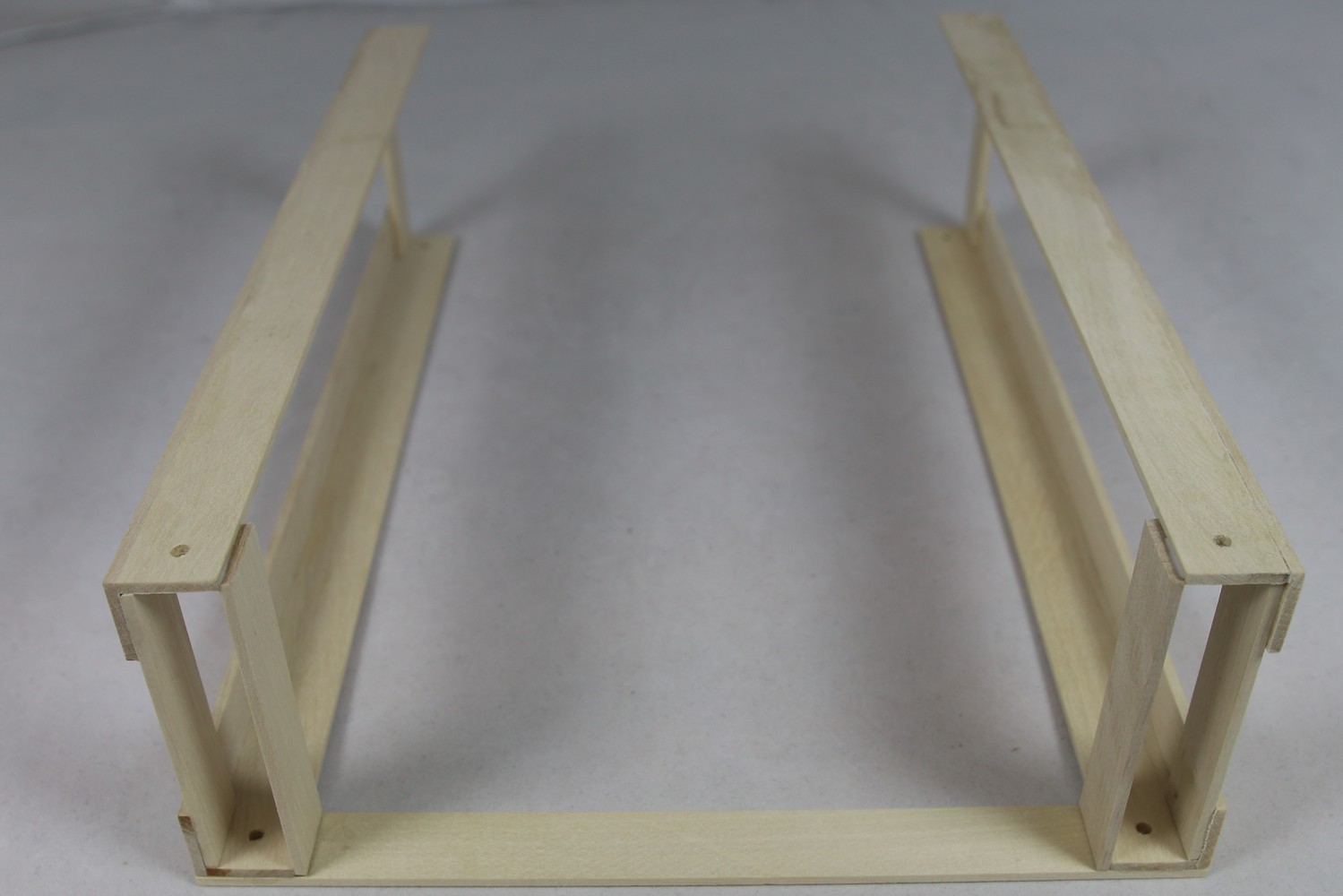
7
Druhé dřívko nalepíme úplně stejně na opačnou stranu.

8
Poté doplníme konstrukci dalšími dvěma 184mm dřívky.

9
První nalepíme diagonálně od toho prvního.

10
Tam k němu přidáme i to poslední, akorát na opačné straně.
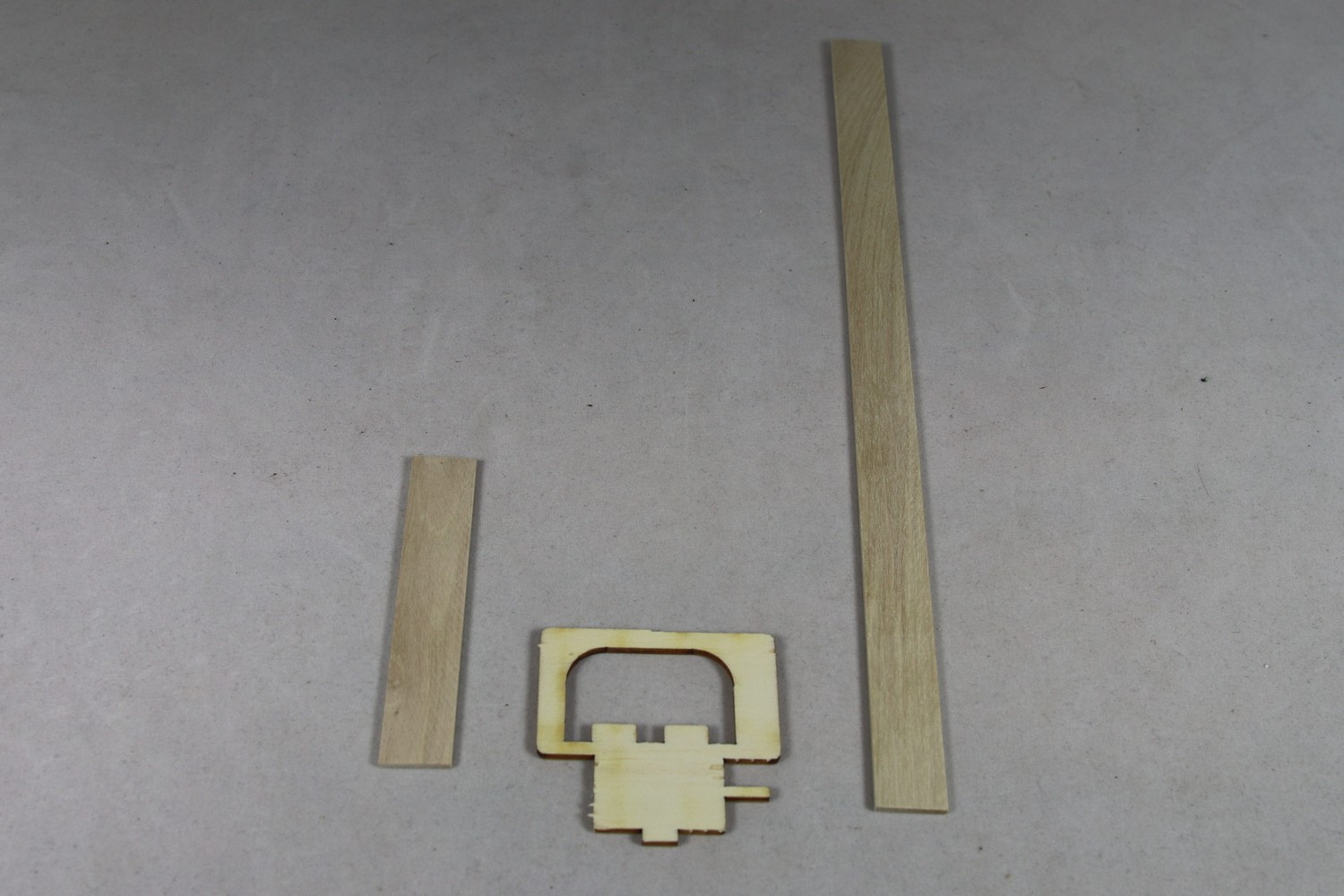
11
Aby měla klec čas zaschnout, přesuneme se na chvíli dále. Nachystáme jedno dřívko o délce 82,8mm a jedno dřívko o délce 260mm. Budeme také potřebovat zbytek 3mm překližky (ze které je většina dílů podvozku) na podložení.

12
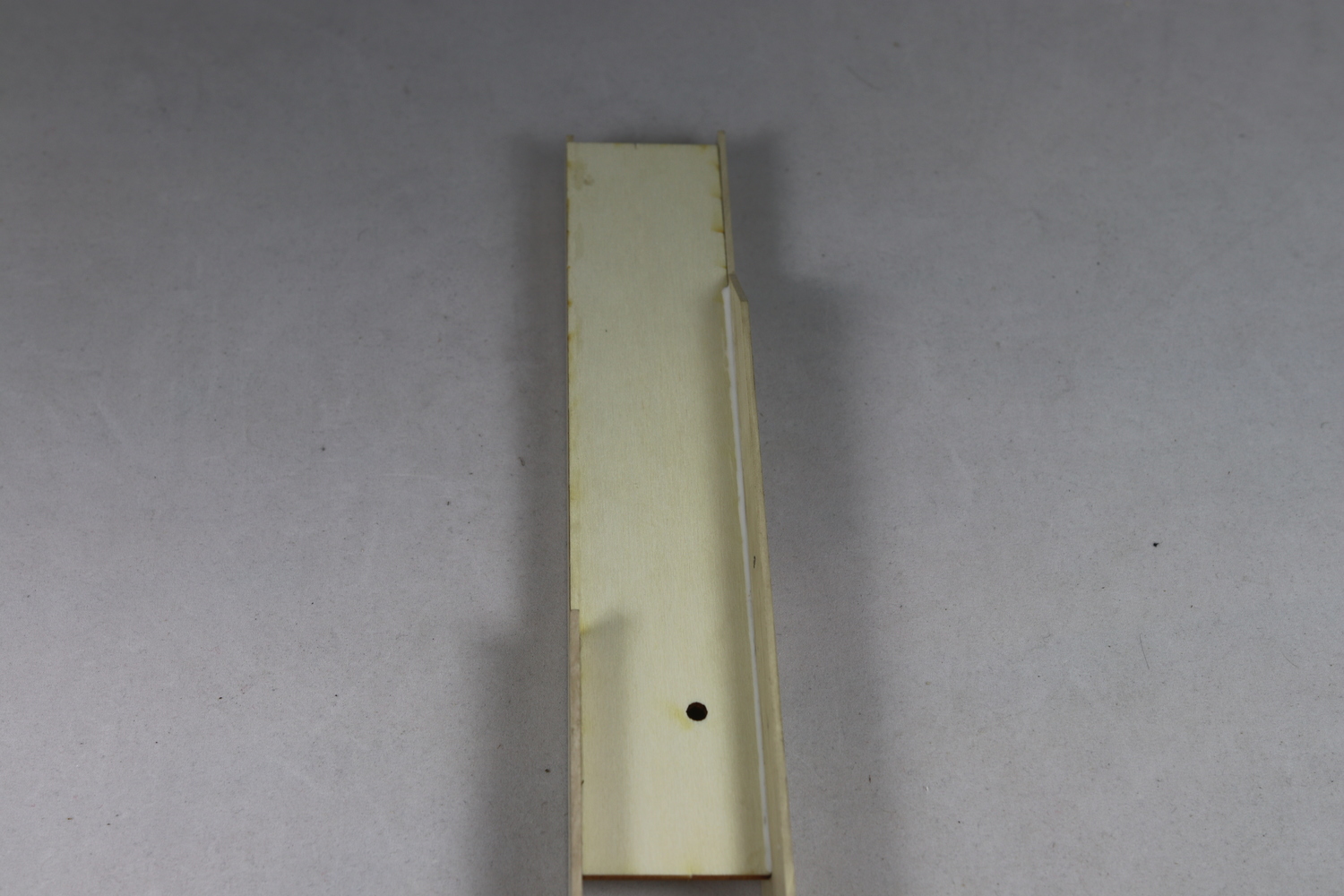
Tyto dvě dřívka slepíme dohromady. Vypomůžeme si při tom zbytkem překližky, abychom dosáhli 3mm odsazení, to znamená, že kratší dřívko bude začínat o 3mm dříve.
13
Potom si nachystáme podobnou dvojici, ale dřívko 82,8mm nahradíme delším zkoseným dřívkem.
14
Ty slepíme v podobném stylu, opět bude kratší dřívko o 3mm předsazené. Navíc je potřeba umístit zkosení tak, aby byla delší strana blíže u delšího drřívka.
15
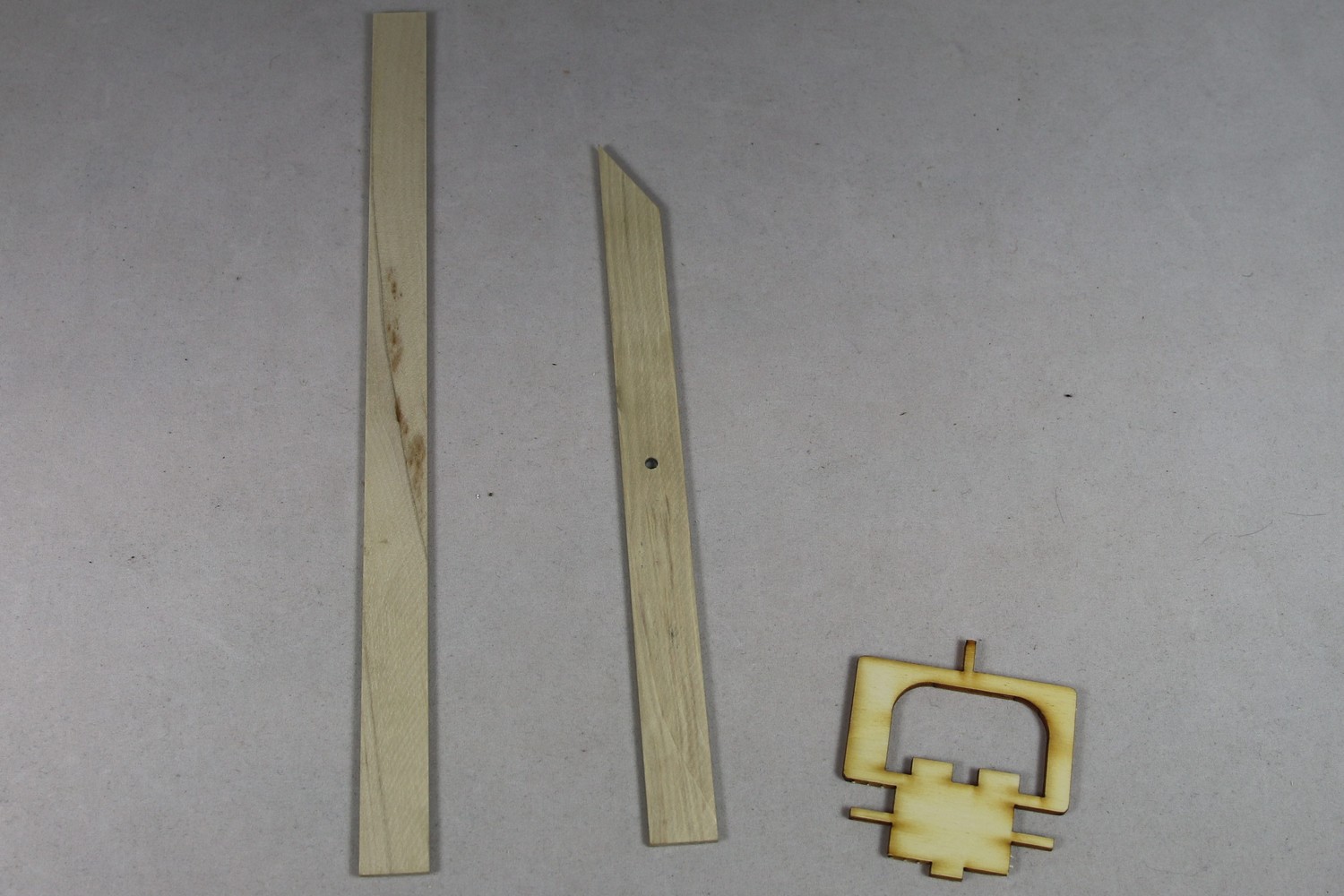
Teď si nachystáme dva díly, které jsme v předchozích krocích slepili a k tomu přidáme ještě díl Z1.
16
Slepíme dohromady díl Z1 a díl neobsahující zkosení. Oba díly mají v sobě zuby, ty do sebe zaklesneme jak je ukázáno na obrázku. Je potřeba udržet pravý úhel mezi oběma díly. Pomozte si hliníkovou kostkou pro udržení přesného pravého úhlu..
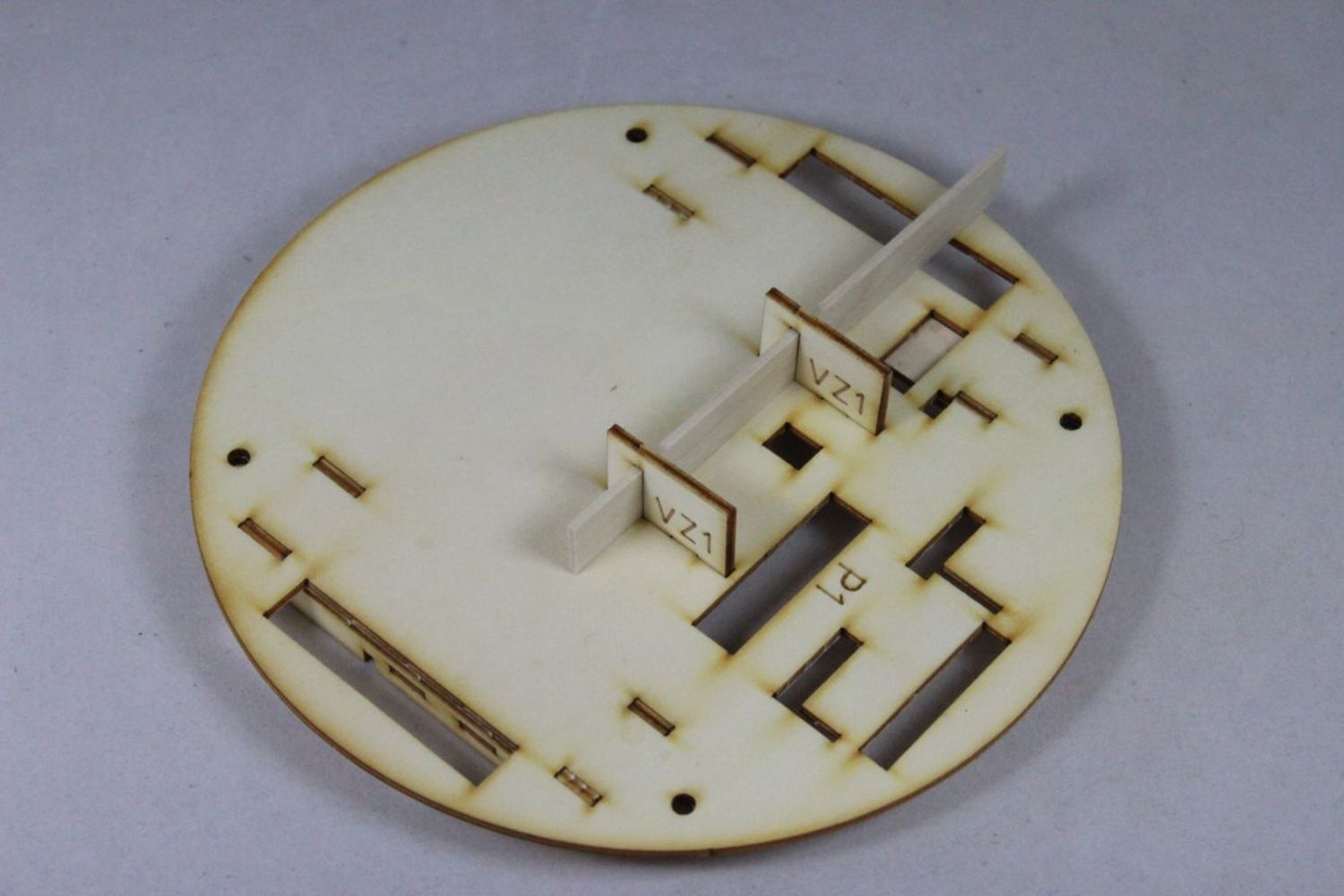
17
Nyní vložíme dřívko o délce 144mm do zářezů v dílech VZ1, ty samotné pak vlepíme do paluby.
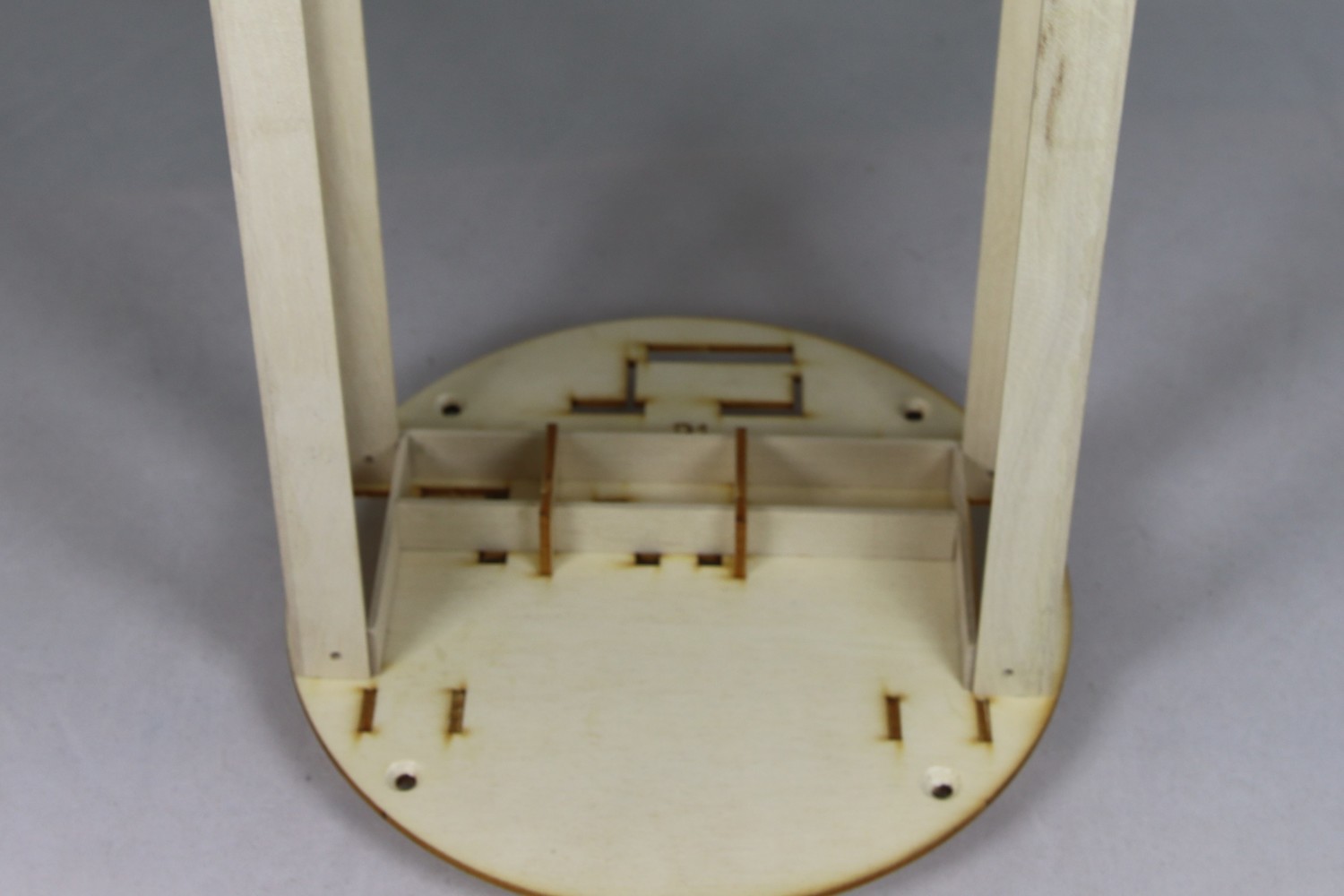
18
Teď nalepíme celou klec na palubu. Natřeme lepidlem spodní stranu klece (ta na které jsou dvě dřívka 68mm a pouze jedno dřívko 184mm). Vnitřní strana 184mm dřívka se přitom bude dotýkat zadní části dílů VZ1 a bude rovnoběžně s dřívkem 144mm. Boky klece musí lícovat s dírami pro kola.
19
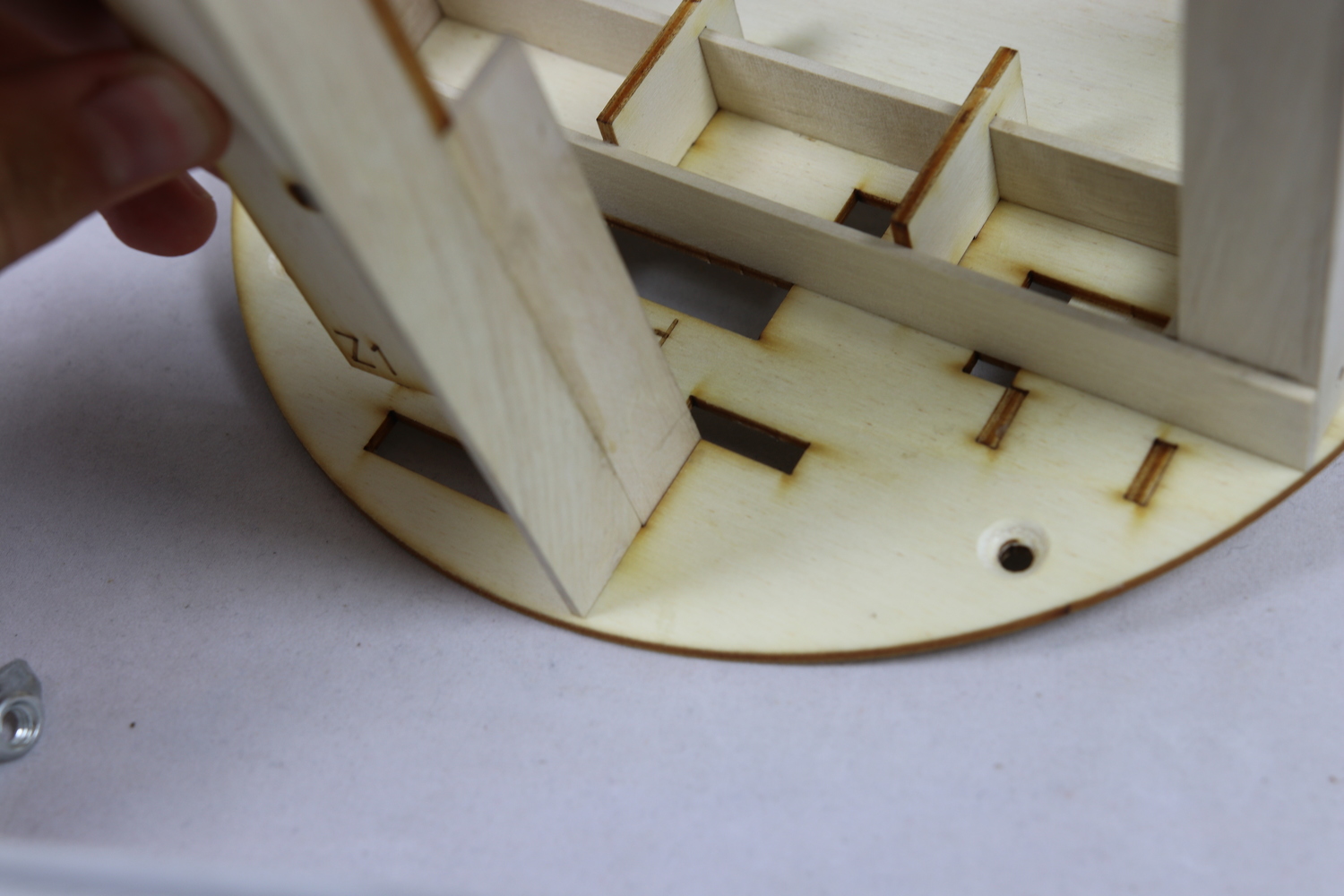
Teď vezmeme L díl obsahující díl Z1 a vložíme jej (nelepíme!) do paluby.
20
K tomuto L dílu nyní přilepíme díl obsahující plné dřívko a dřívko se zkosením. Palubu při tom využíváme k udržení správné vzájemné polohy obou dílů. Dbáme, aby nahoře dřívka seděla(jako na obrázku, ale lépe). Počkáme do zaschnutí lepidla.
21
Takto by měla vypadat dolní část.
22
Takhle vypadá správně slepený díl po zaschnutí a vyjmutí z paluby.
23
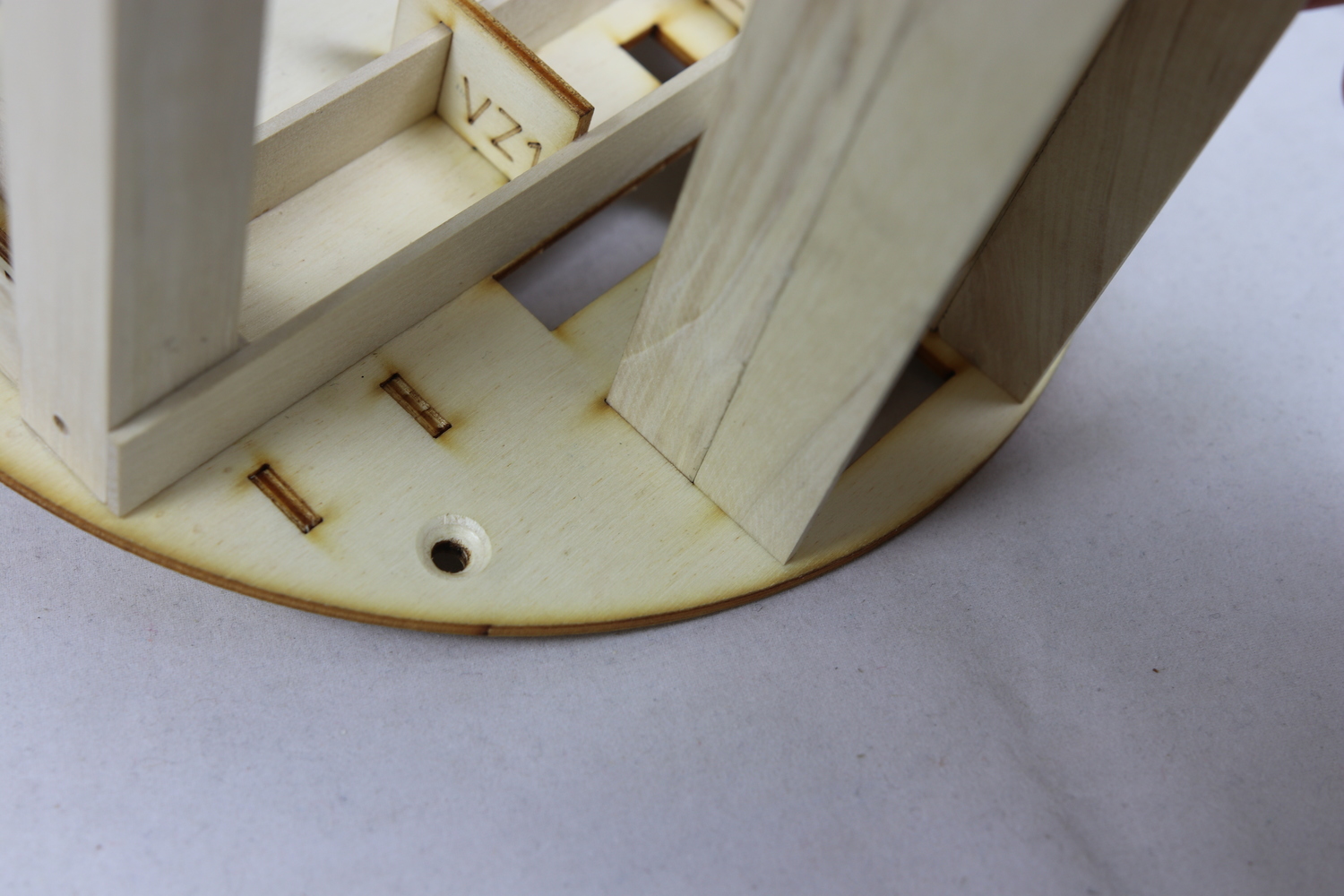
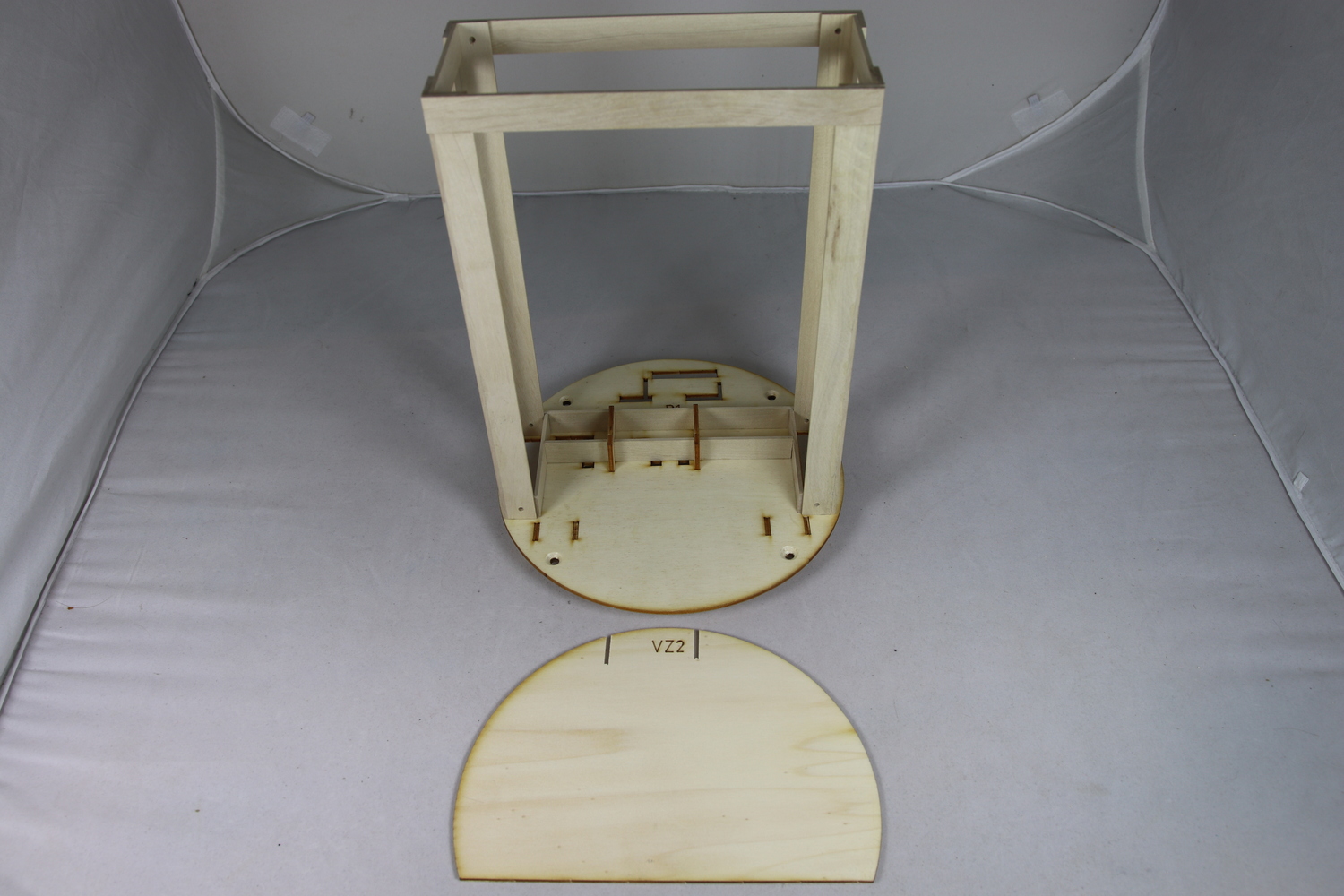
Nyní si nachystáme palubu s klecí a díl VZ2.

24
Díl VZ2 nalepíme nápisem dolů, je potřeba zkontrolovat, aby přední část lícovala s dřívkem. Opět necháme zaschnout.

25
Poté si nachystáme palubu s klecí a záda.
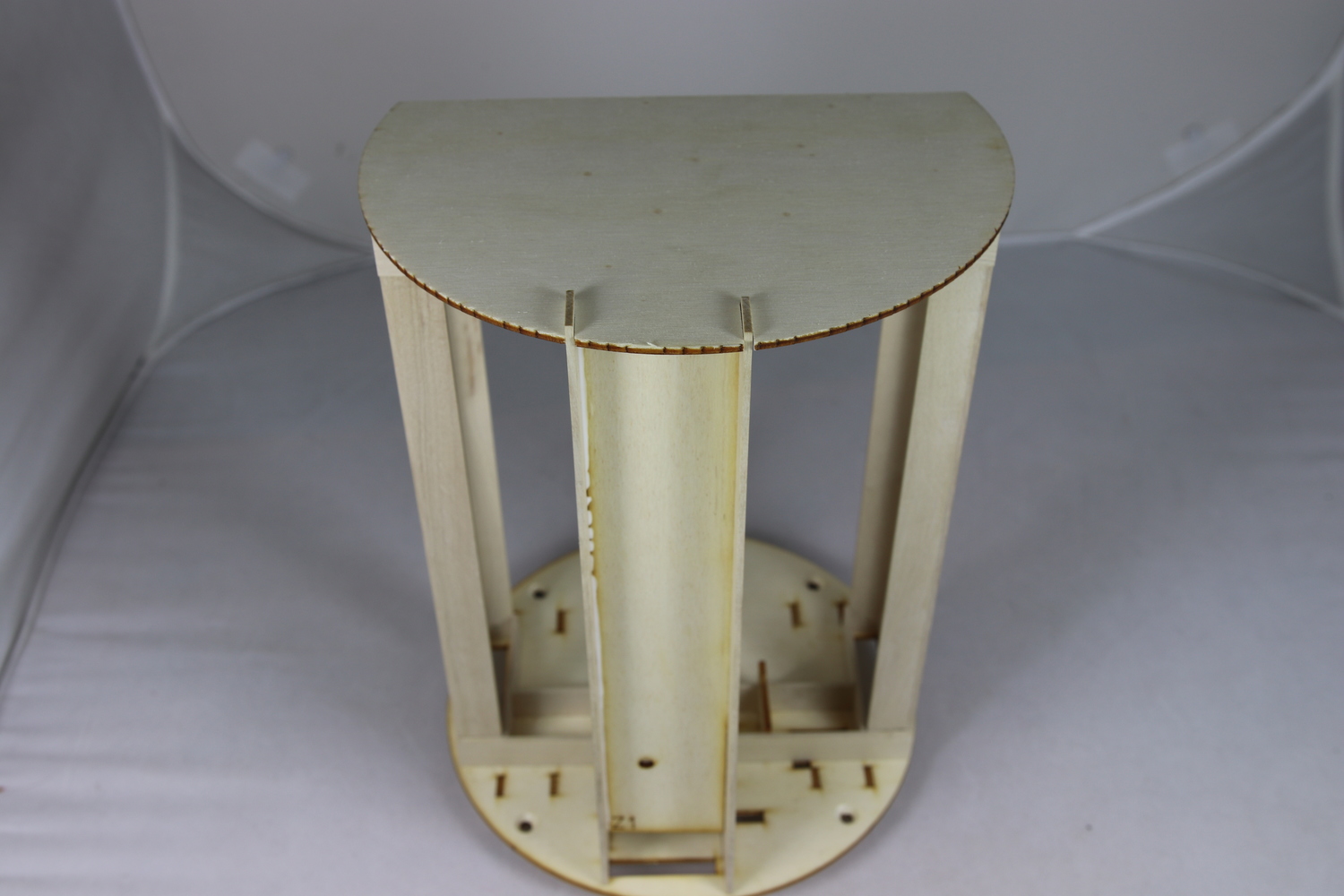
26
Nyní přilepíme záda do paluby a nahoře do dílu VZ2.
27
Je potřeba dole zkontrolovat správné otočení.
Montáž elektroniky do podvozku
1
Pro montáž elektroniky do podvozku potřebujete:
- podvozek s namontovanými motory a koly
- řídící desku pro robota - RBControl
- dokovací desku pro BatteryPack

2
Na čtyři šrouby M3 nachystané ve spodní palubě nasaď čtyři plastové růžové podložky podle obrázku (jednu podložku na 1 šroub).

3
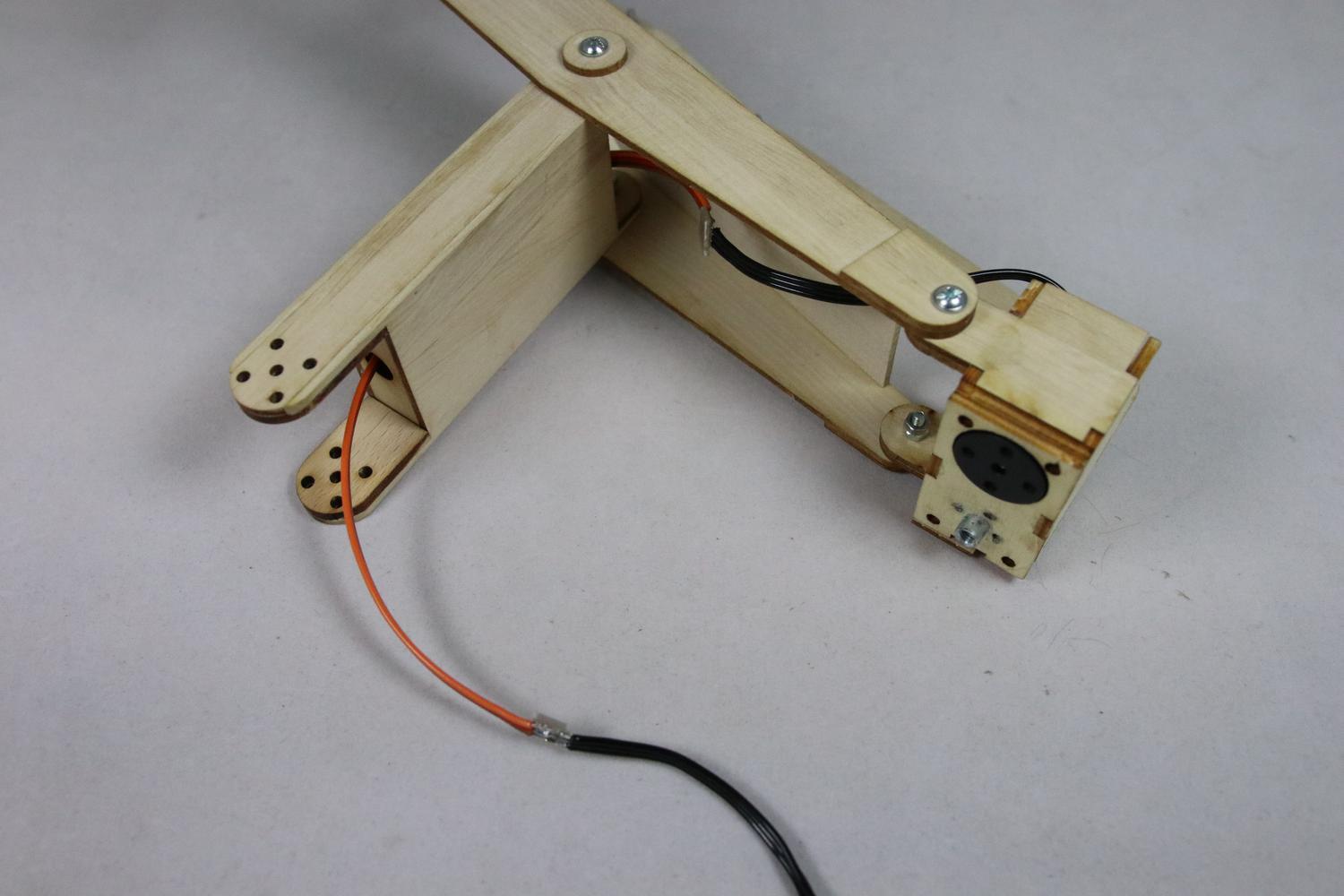
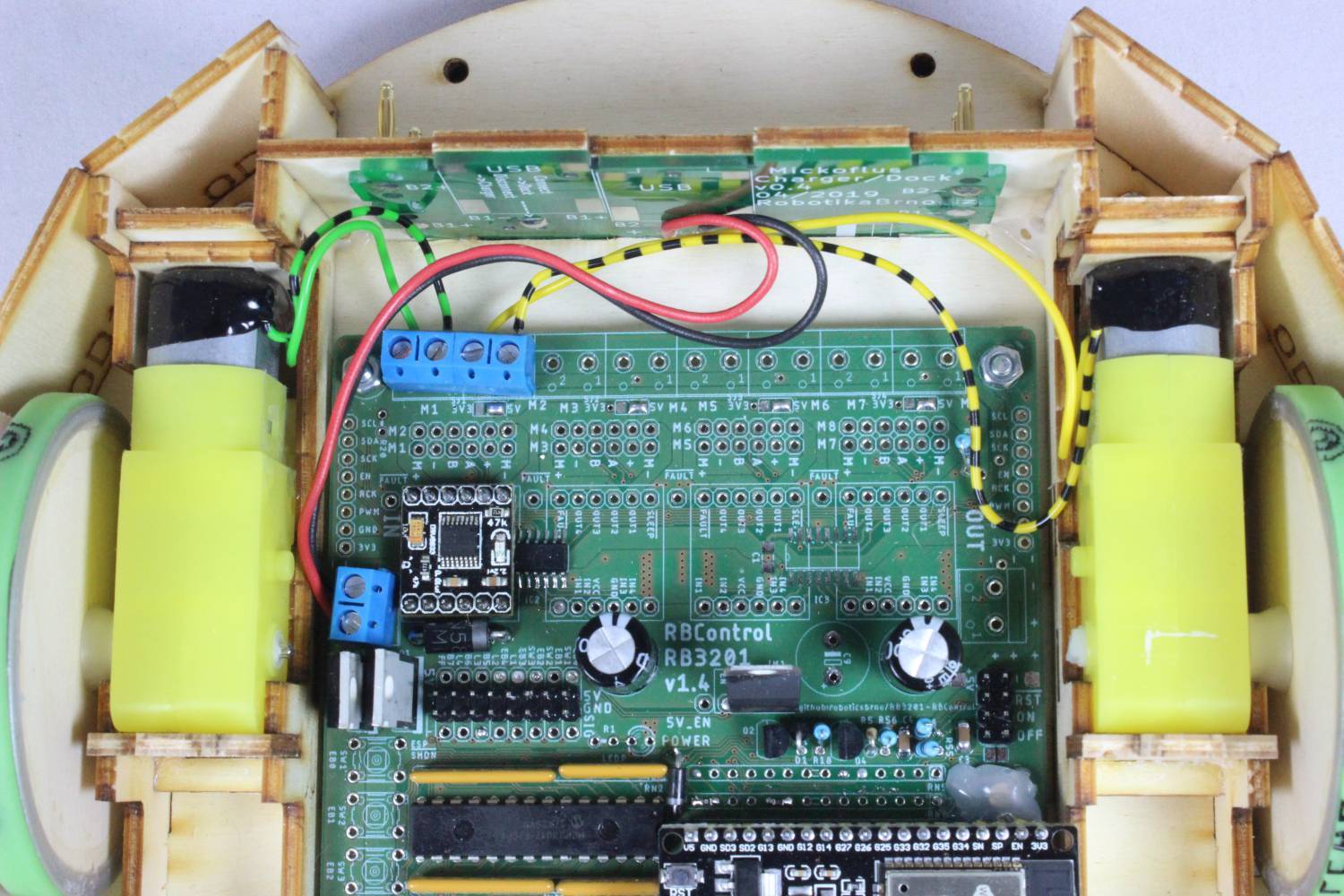
Připevni kabely od motorů do svorkovnic na RBControlu podle obrázku.
4
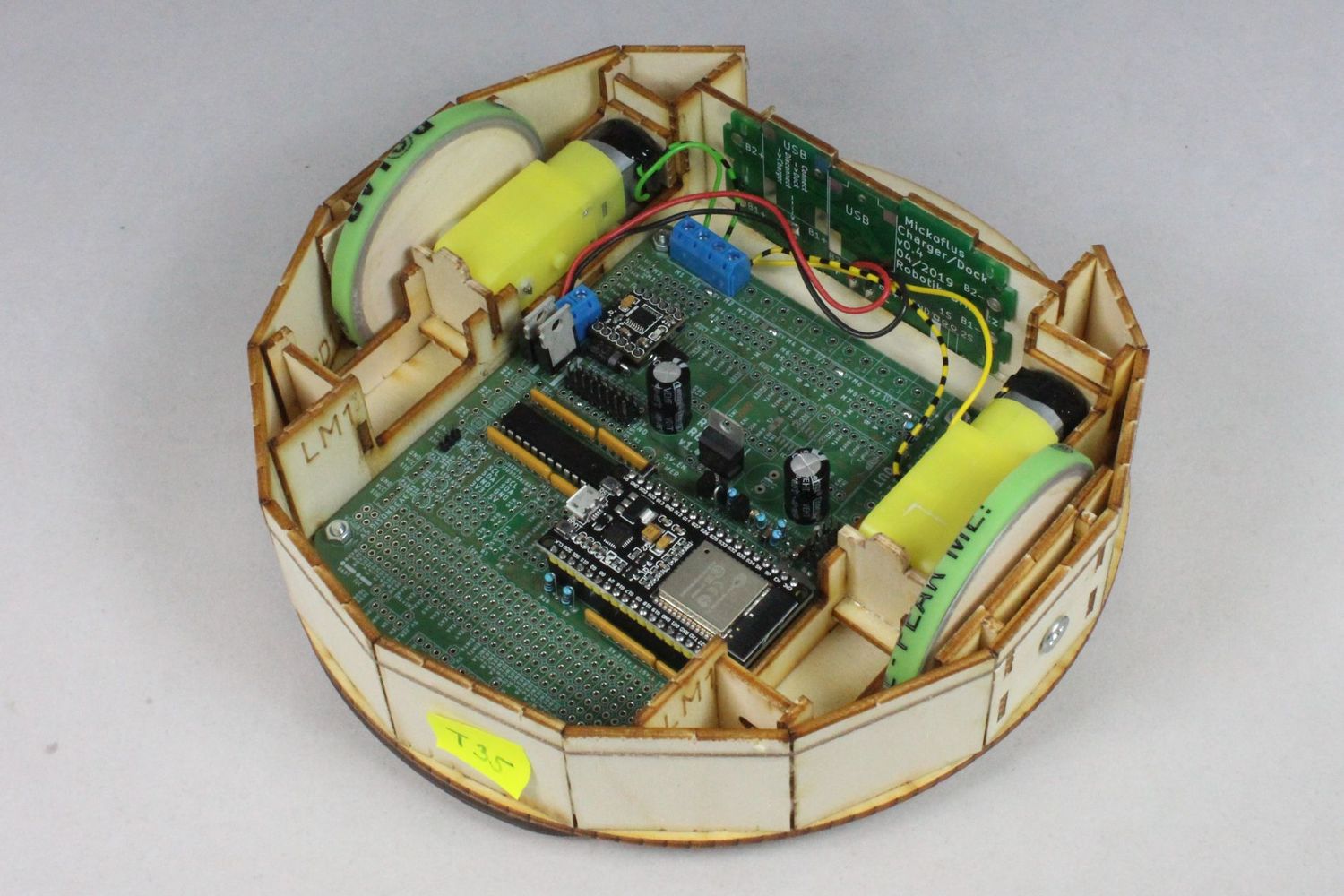
Dokovací desku pro BatteryPack zasuňte do podvozku podle obrázku a napájecí kabely připevněte do svorkovnic.
Červený/fialový kabel patři na kladný pól (plus) a černý/modrý kabel patří na záporný pól (mínus). Na RBControlu je póly vyznačeny pomocí symbolů + a -.

5
Nasaďte desku RBControl na 4 šrouby M3 s podložkami. RBControl připevněte pomocí 4 matic M3.
Spojení roboruky a zbytku robota
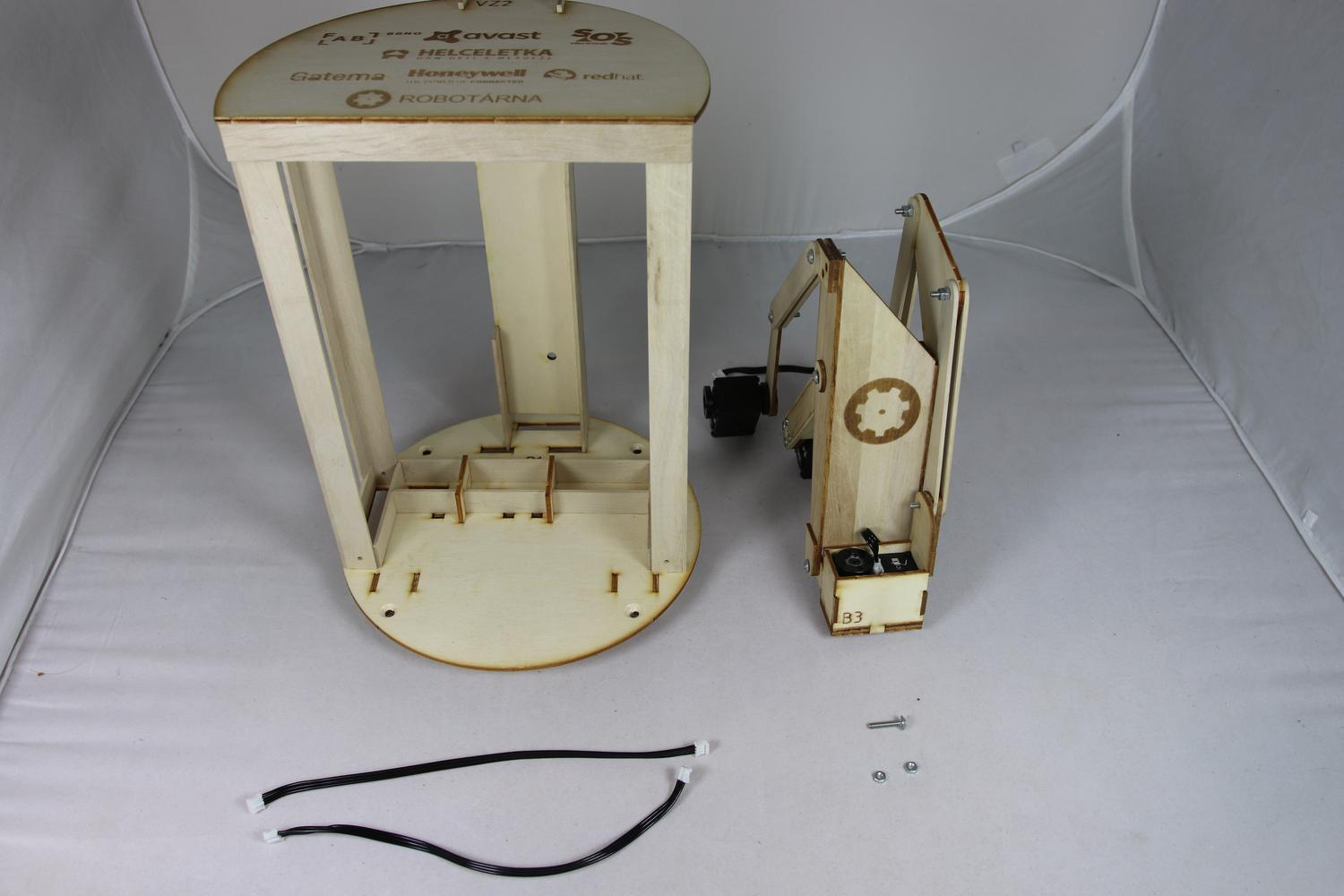
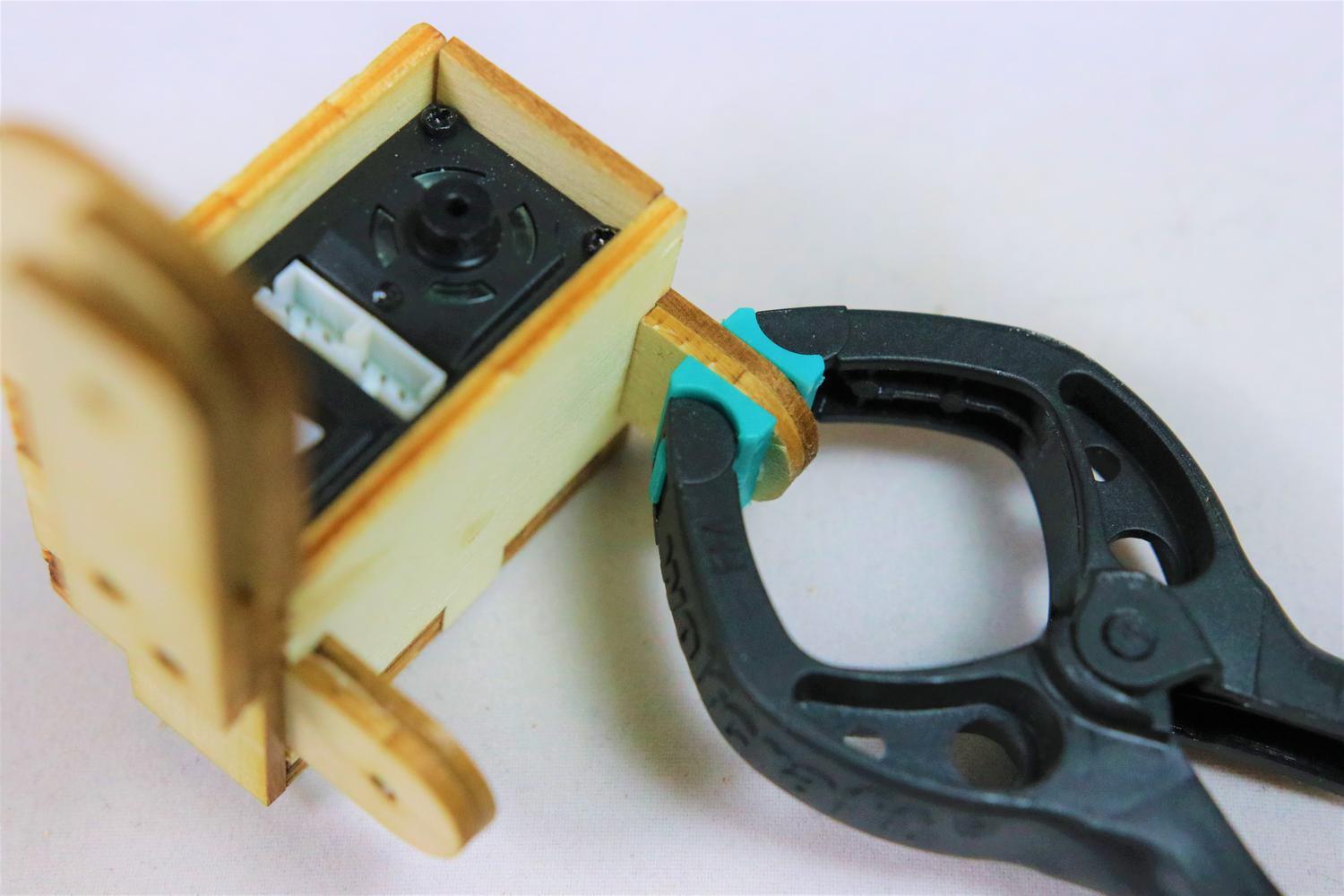
1
Pro přimontování roboruky na robota budeme potřebovat, palubu s klecí, roboruku, a dva krátké kabely k servům.
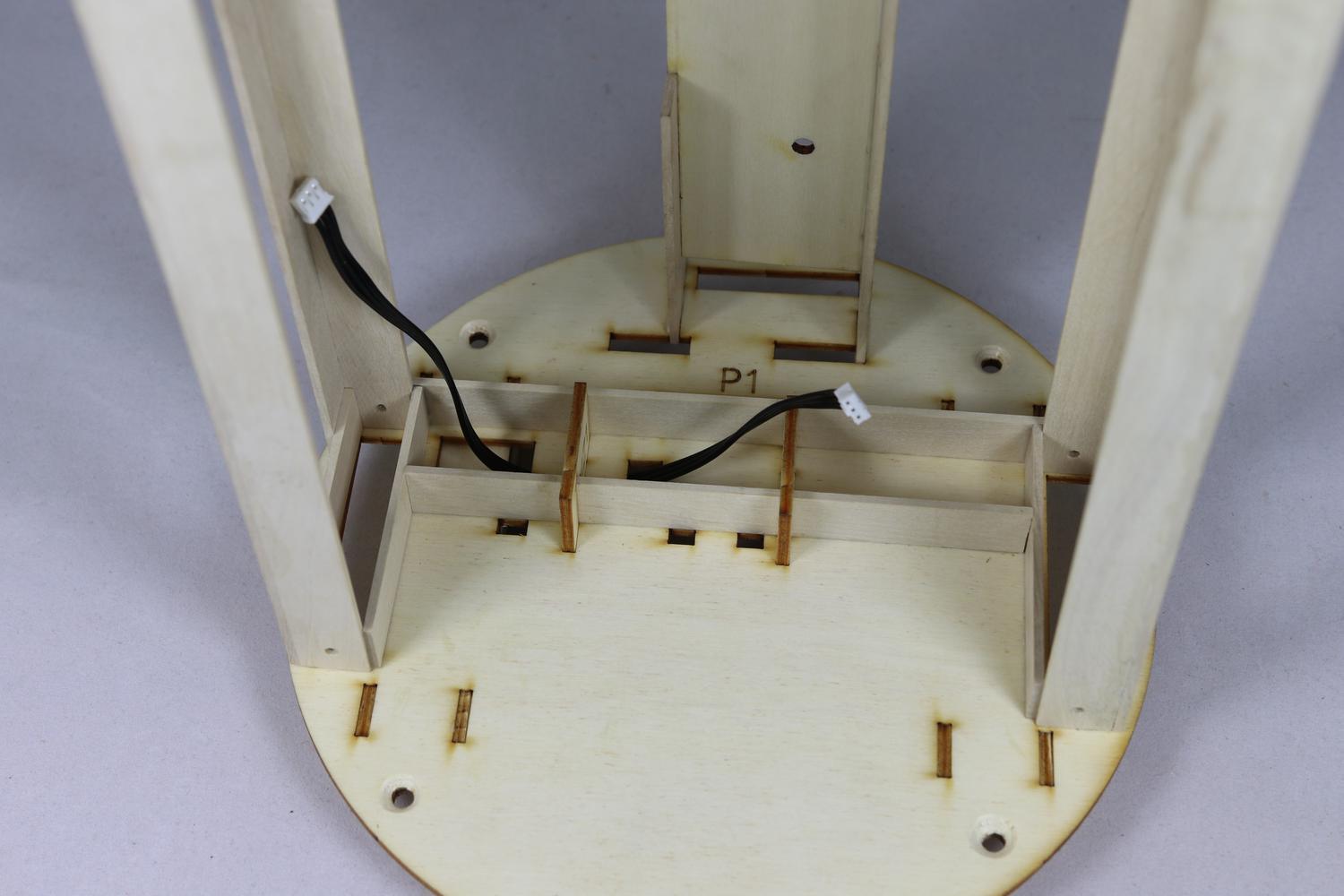
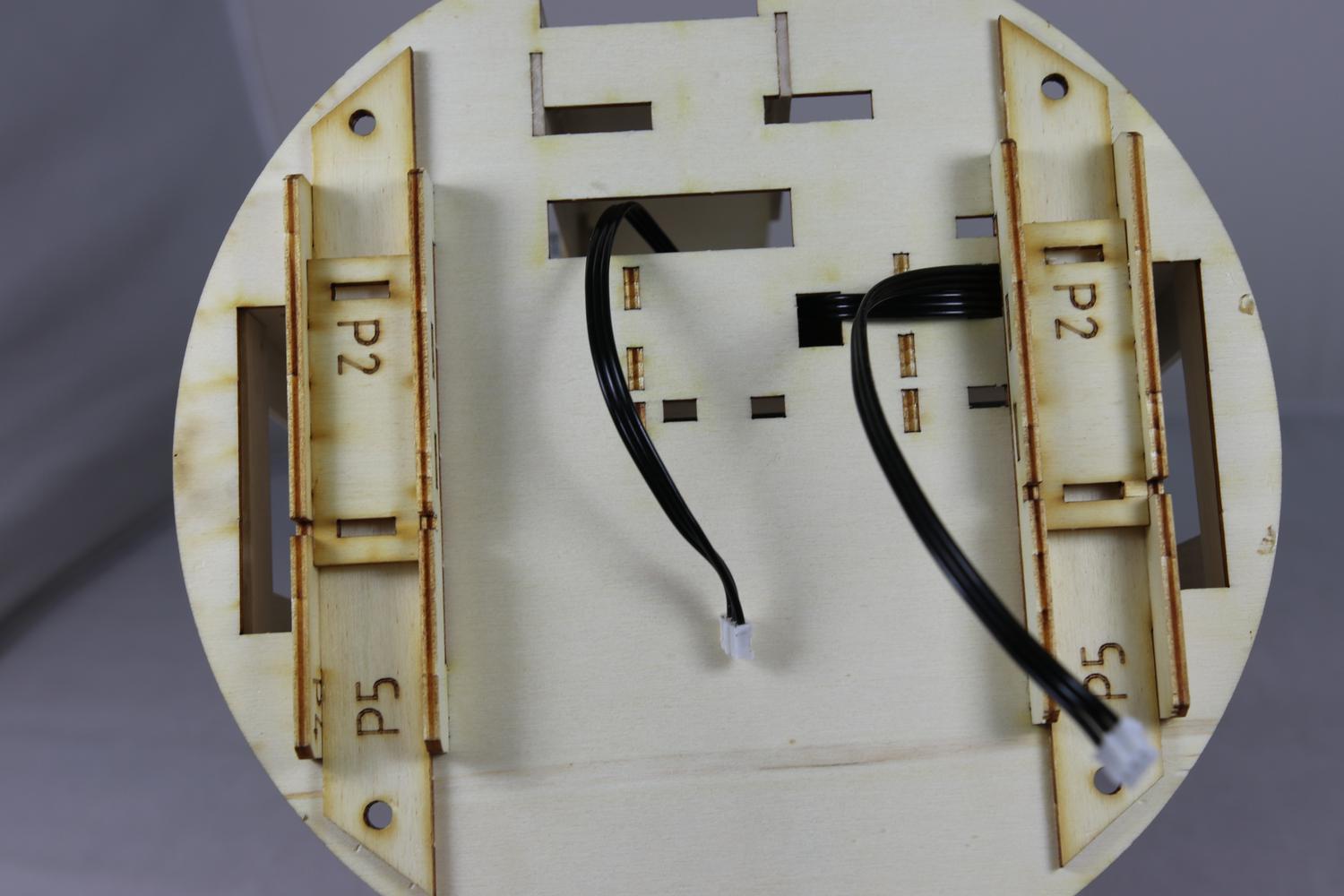
2
První kabel je potřeba provléknout tak jak je na obrázku.
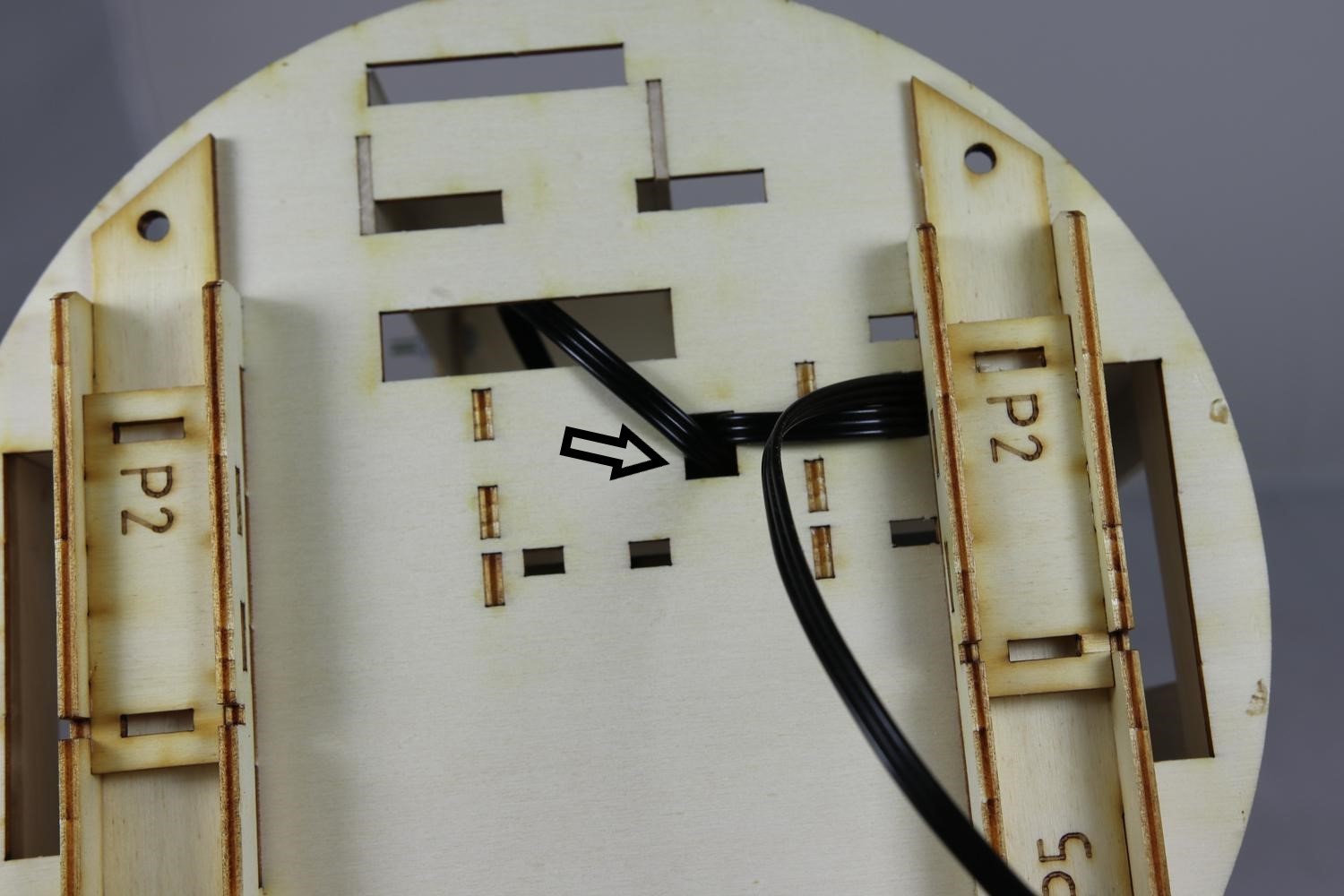
3
Druhý kabel provlékneme takto(pro přehlednost jsem vyndal první, vy ho tam nechete)

4
Takto to vypadá po protažení obou kabelů.

5
Nyní vezmeme roboruku, která musí být nastavena do nulové polohy, jinak nepůjde namontovat.
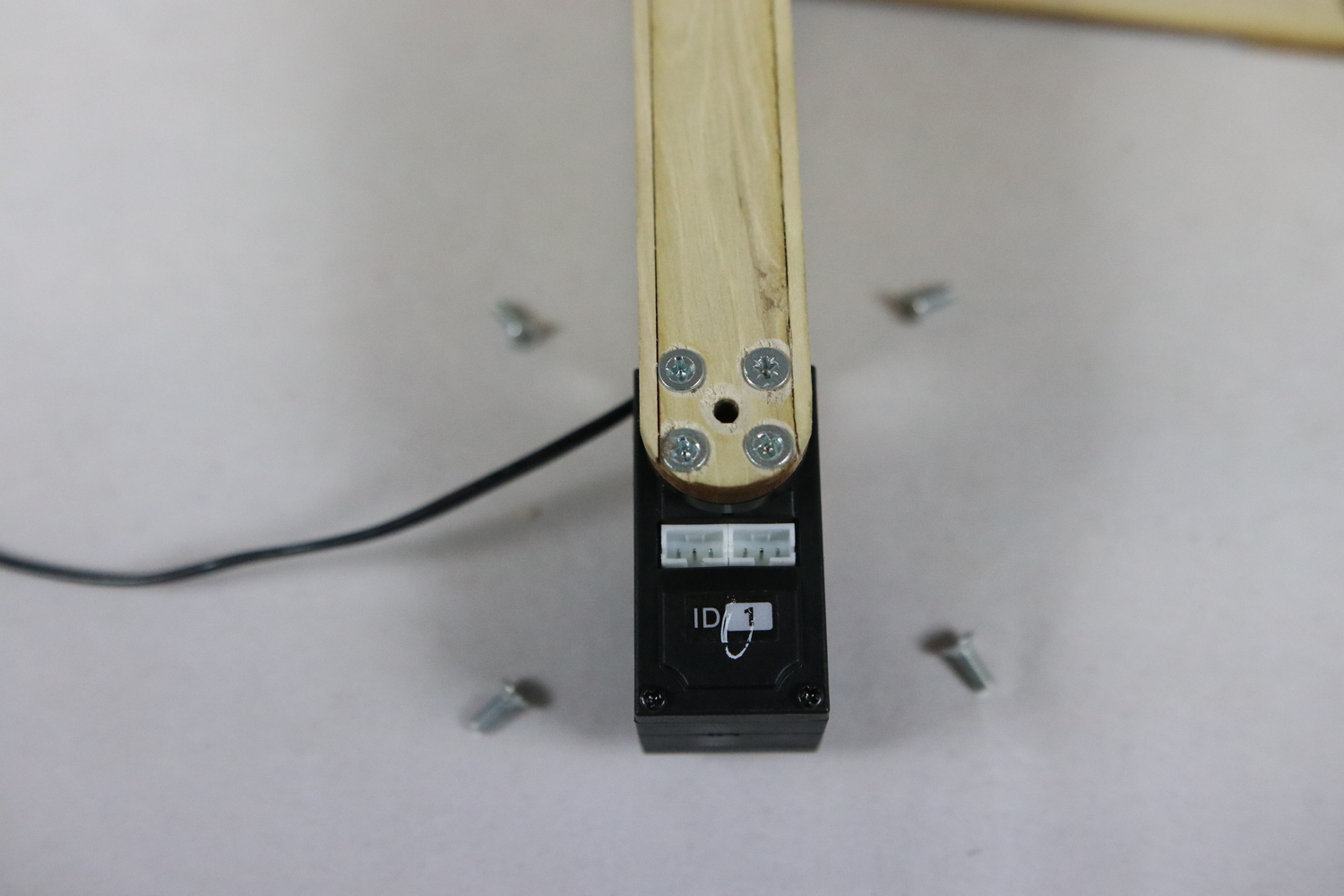
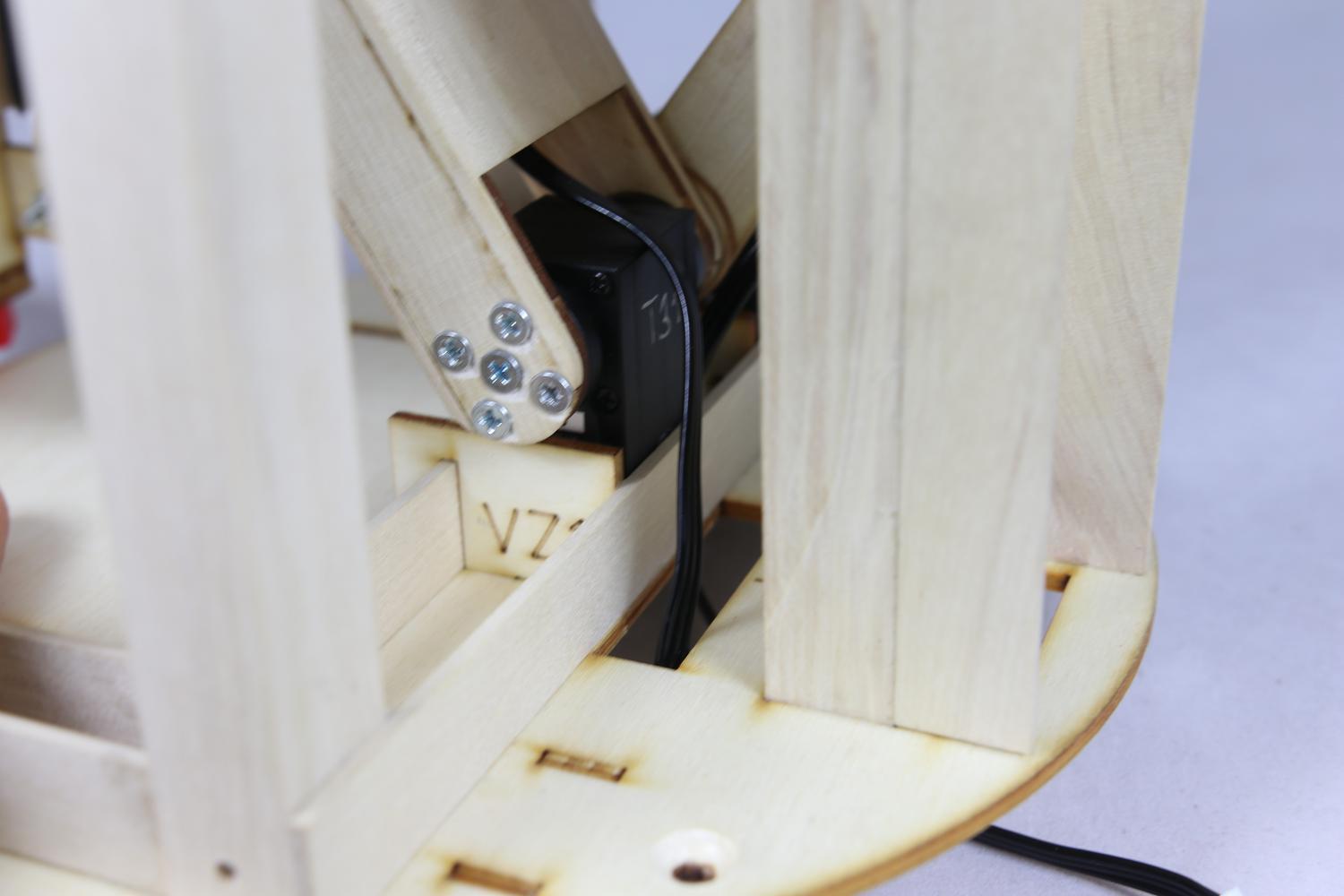
6
Zasuneme servo číslo 1 do kastlíčku blíže okraji a dorazíme k vnitřímu okraji. Pozor na protažený servo kabel!

7
Zasuneme servo číslo 0 do prostředního kastlíčku, dorazíme co nejdál od serva 1. Pozor na protažený kabel.
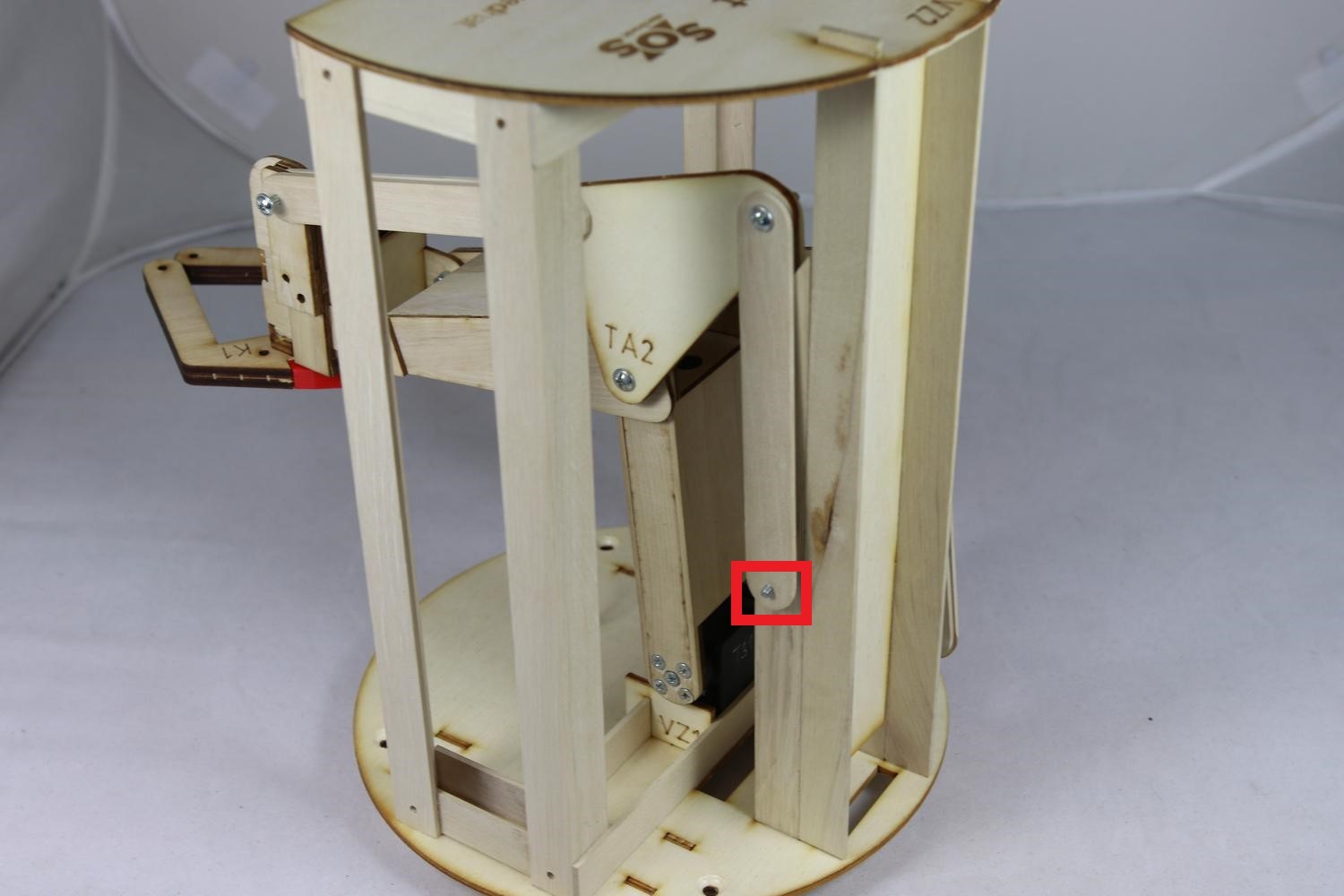
8
Nyní je potřeba připevnit neukotvená dřívka ruky, vycházející z dílu TA2. Připevníme je šroubkem, tak jak je na obrázku. Poté dotáhneme kontramaticí. Je potřeba zkontrolovat, že se mohou díly volně otáčet.
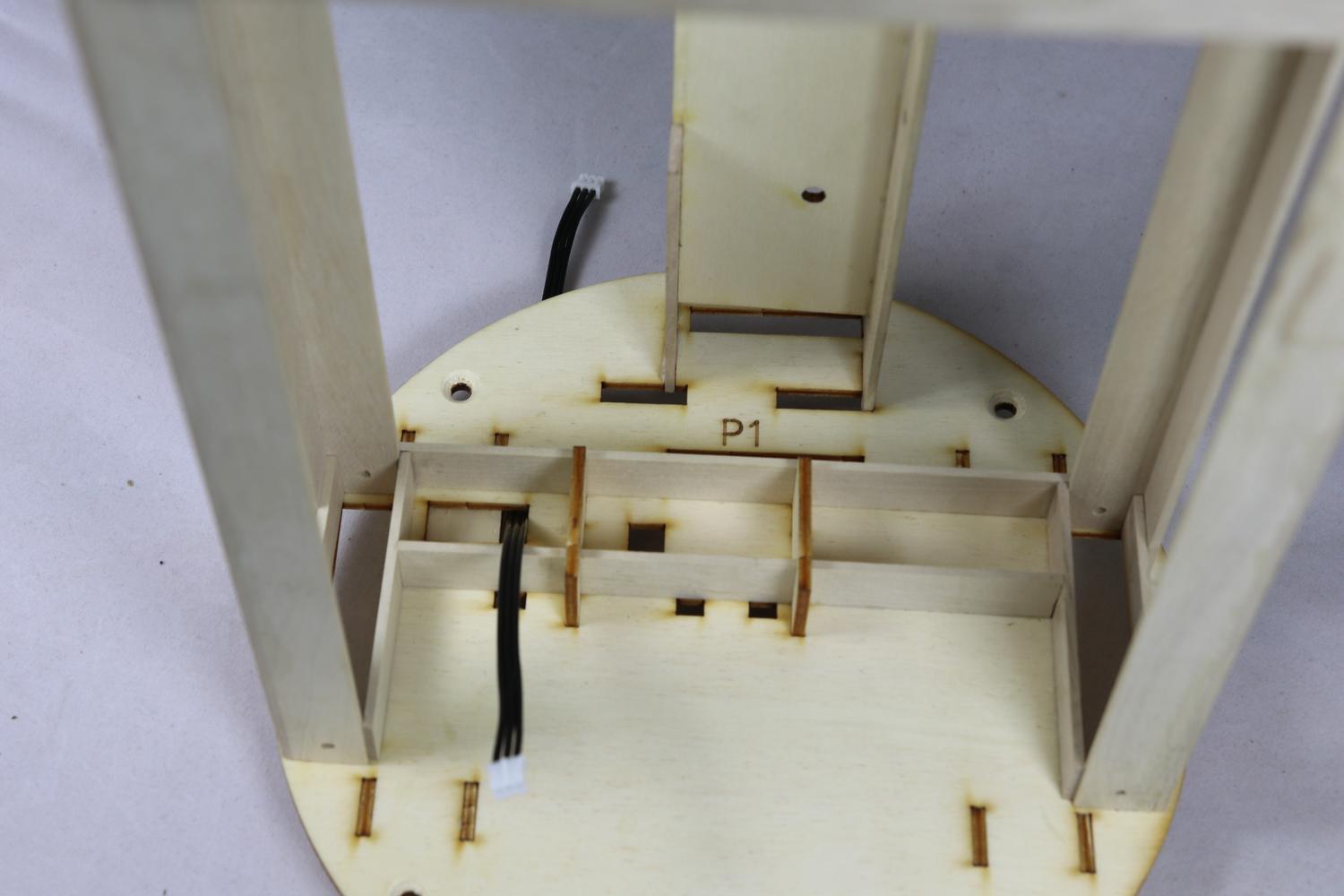
9
Kabel vedoucí od serva 2 zasuneme dírou nacházející se za servem 0.
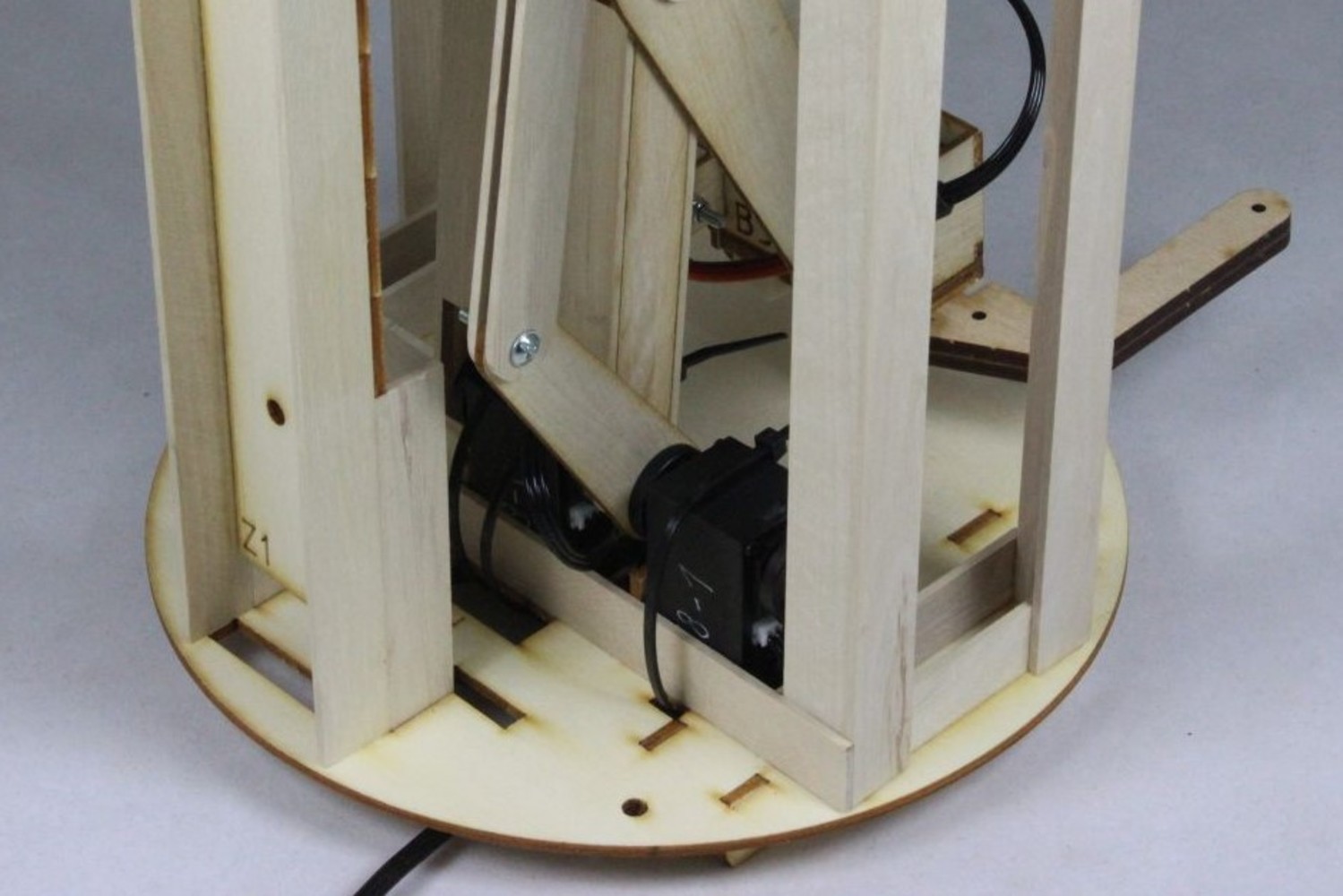
10
Poté se podíváme na spodek paluby. Měl by vypadat takto.
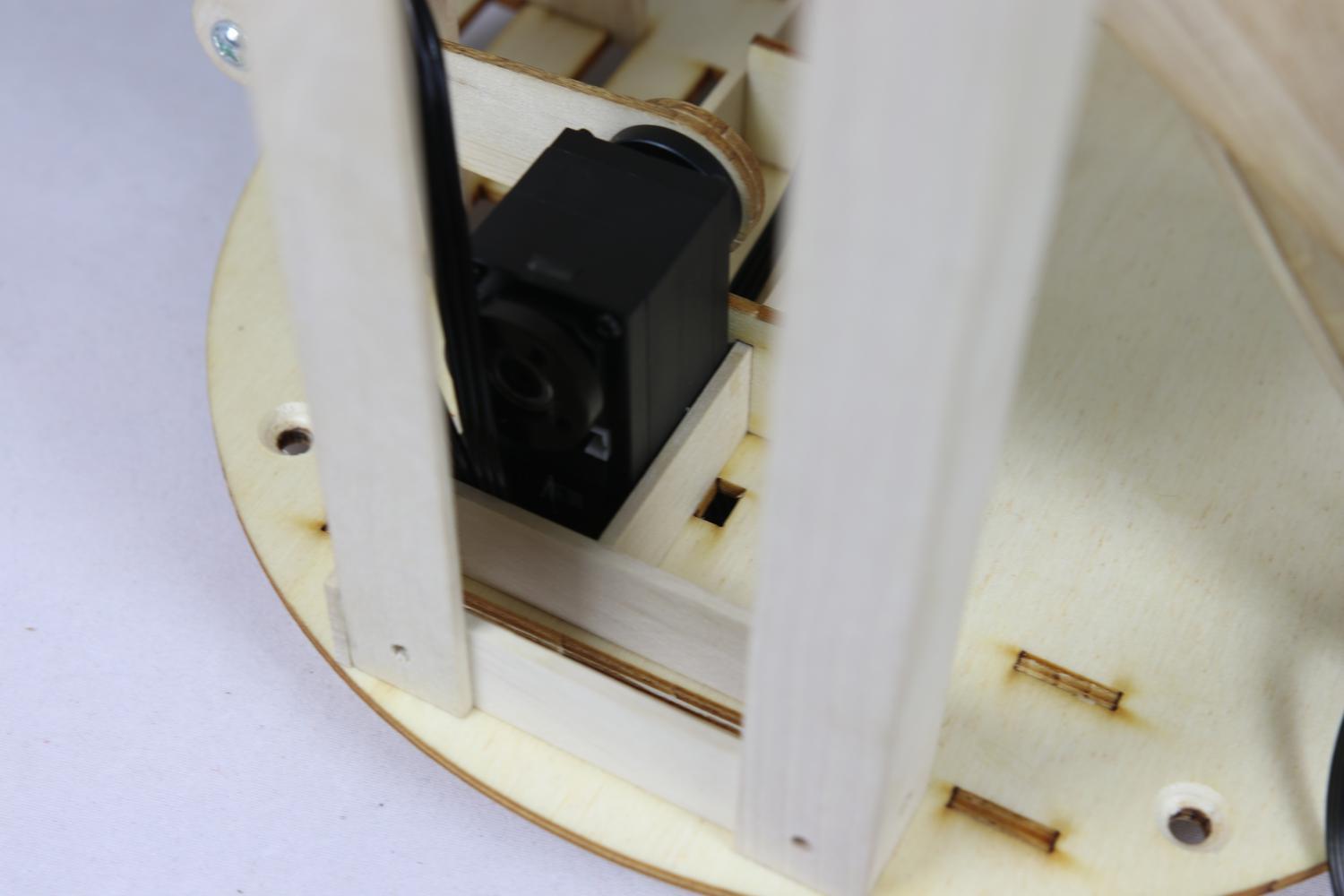
11
Kabel od serva 2 nyní protáhneme dírou k servu 0 na horní část paluby.

12
K servům 0 a 1 by nyní ke každému měly vést dva kabely. Ty do těchto serv zapojíme. Je jedno, který se zapojí do které díry, pokud je to na správném servu.

13
Takto by měla vypadat kabeláž. Ven nám nyní vede pouze jeden servokabel.
14
Navlečte 2 zip pásky na servo 0 a jednu zip pásku na servo 1 podle obrázku a utáhněte je. Dejte pozor aby nebyly skřípnuty kabely serv. Spojení roboruky a paluby je hotovo.
Pro zvídavé
Proč vkládat díly OD1 nápisem ven?
Protože na popsané straně jsou díly o trochu užší. Kdyby se díly daly naopak, propadaly by se více do paluby a dostatečně by se o sebe neopřely. Pálení na laseru způsobuje, že strany nejsou kolmé. Paprsek není válcový, ale kuželový, protože se se vzdáleností rozptyluje.
Programovací prostředí
Roboruka obsahuje procesor ESP32, běží na 240MHz a má dvě jádra. ESP32 se programuje v jazyku C++ a používáme vývojové prostředí PlatformIO v editoru Visual Studio Code.
Napsali jsme pro vás knihovny, které programování Roboruky a potažmo celé desky RBControl zjednodušují. Máte také k dispozici základní příklady programování Roboruky.
1. Stáhnětě si a nainstalujte VSCode:
- Pokud jste na táborové WiFi a máte Windows: rychlý odkaz
- Pokud nefunguje: oficiální odkaz
2. Instalace PlatformIO
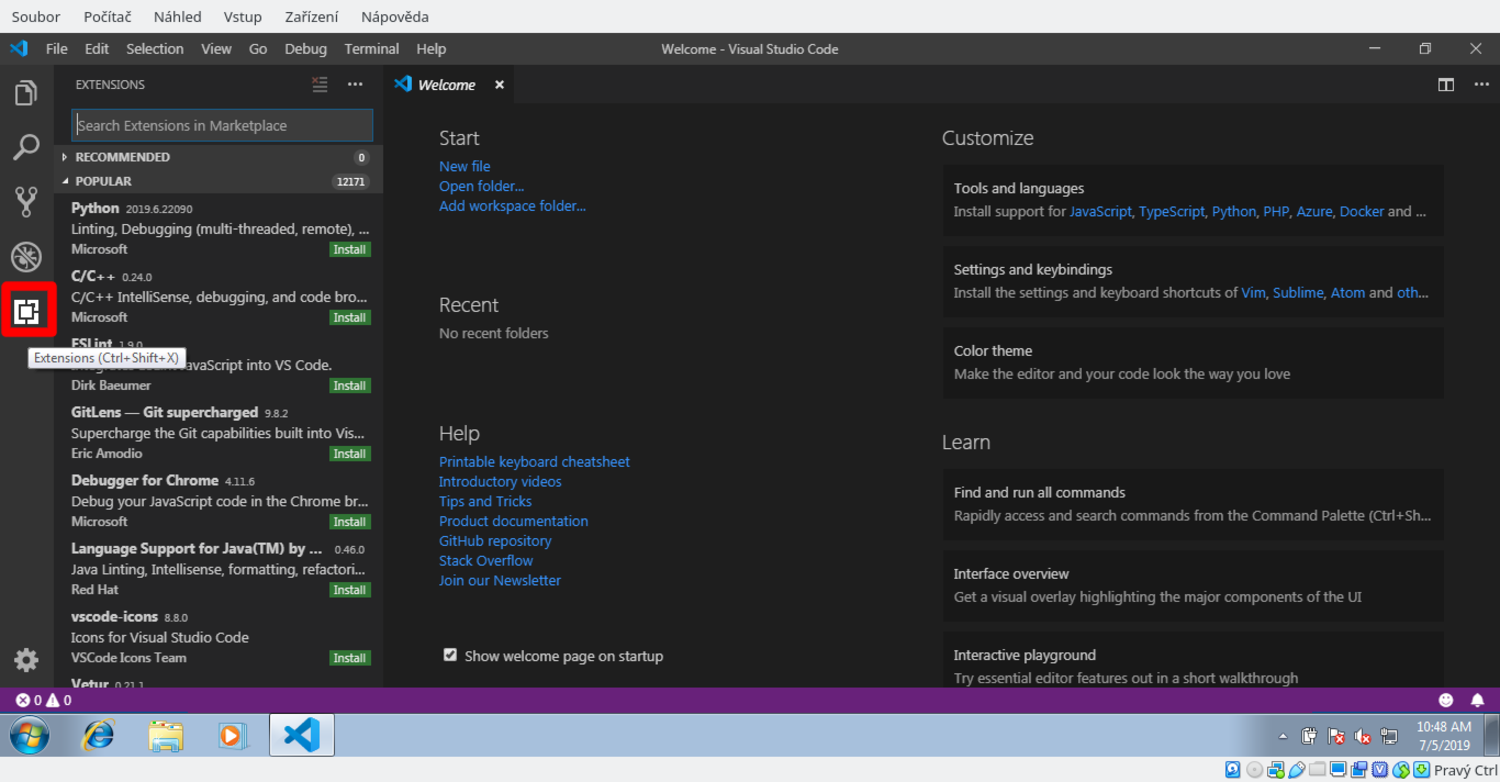
1
Otevřete VSCode a klikněte na čtveratou ikonku rozšíření na levé straně.
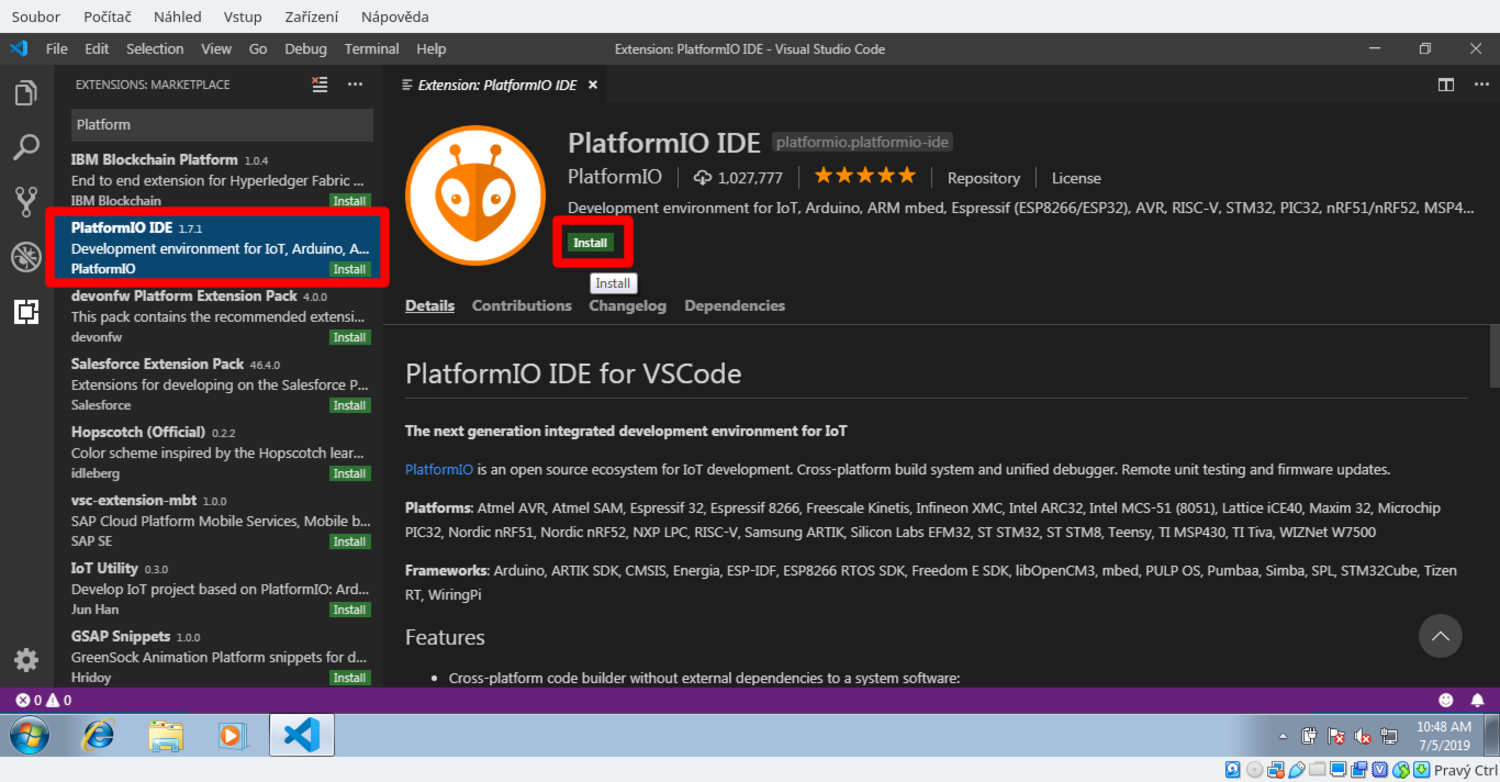
2
Najděte a nainstalujte rozšíření PlatformIO IDE.
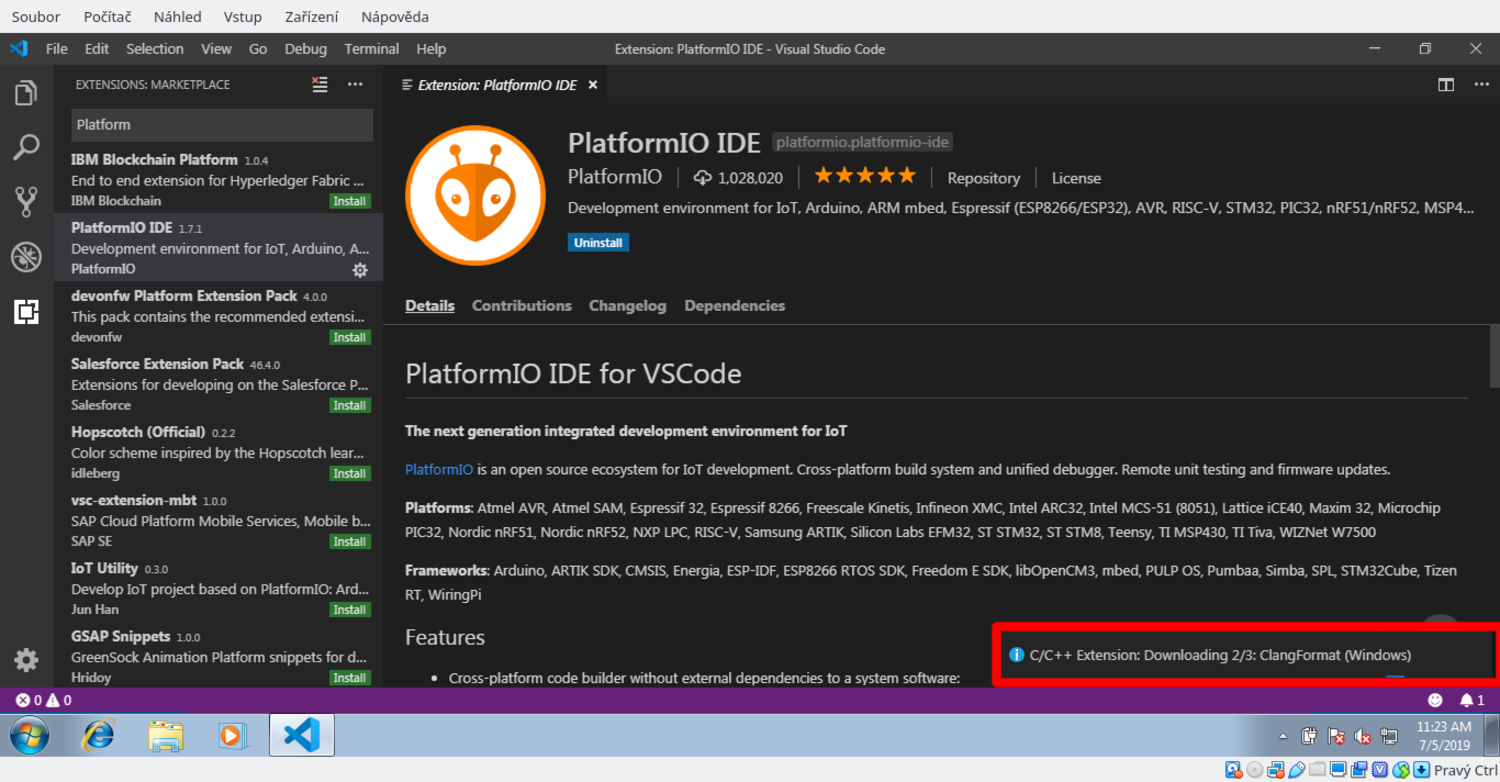
3
Po nainstalování rozšíření se začne stahovat spousta doplňkových balíčků. Počkejte, dokud se nenainstalují C/C++ Extensions…
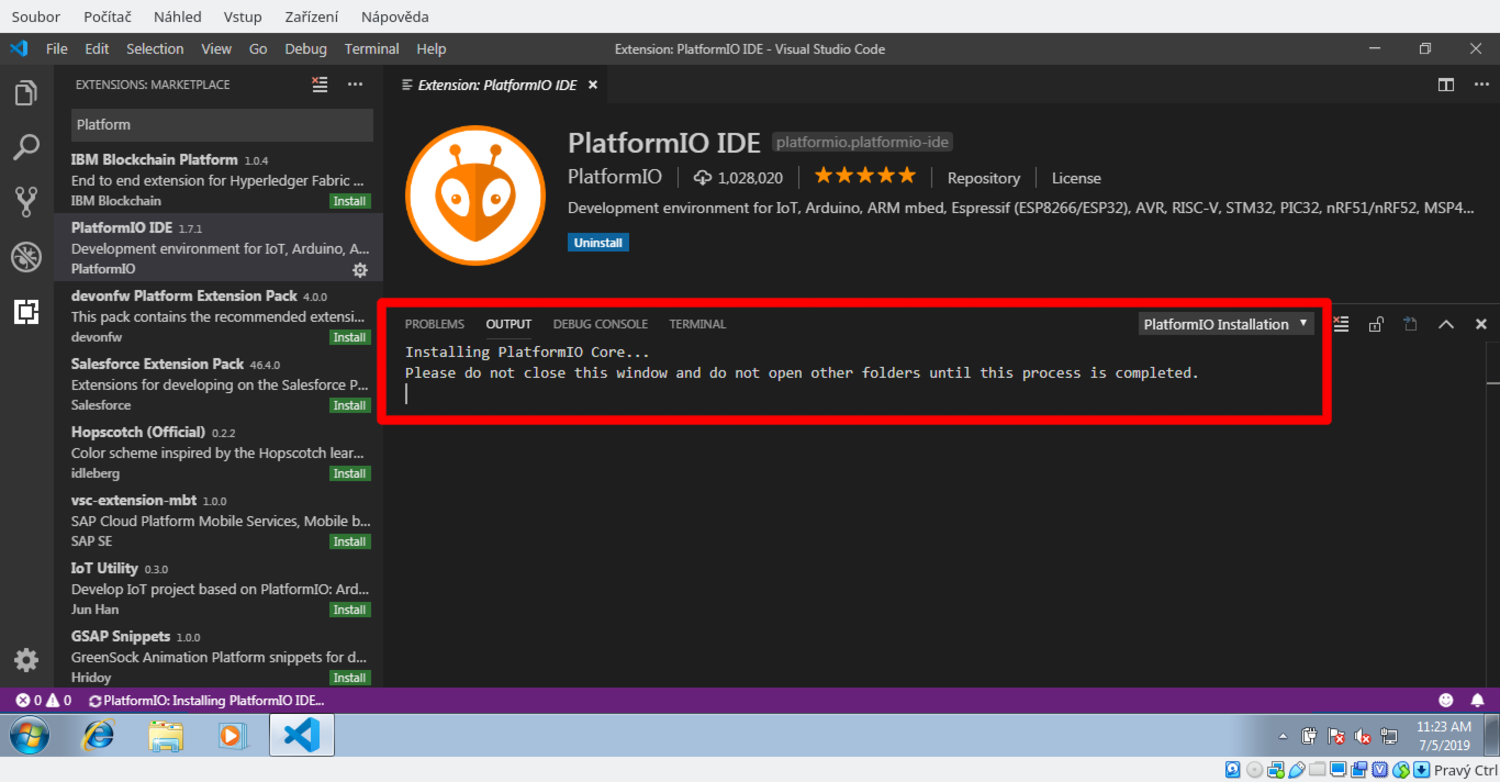
4
… a také PlatformIO Core. Na pomalejším internetovém připojením to bude chvíli trvat.

5
Jakmile je vše hotovo, VSCode vám nabídne restart. Přijměte ho.
První program
1
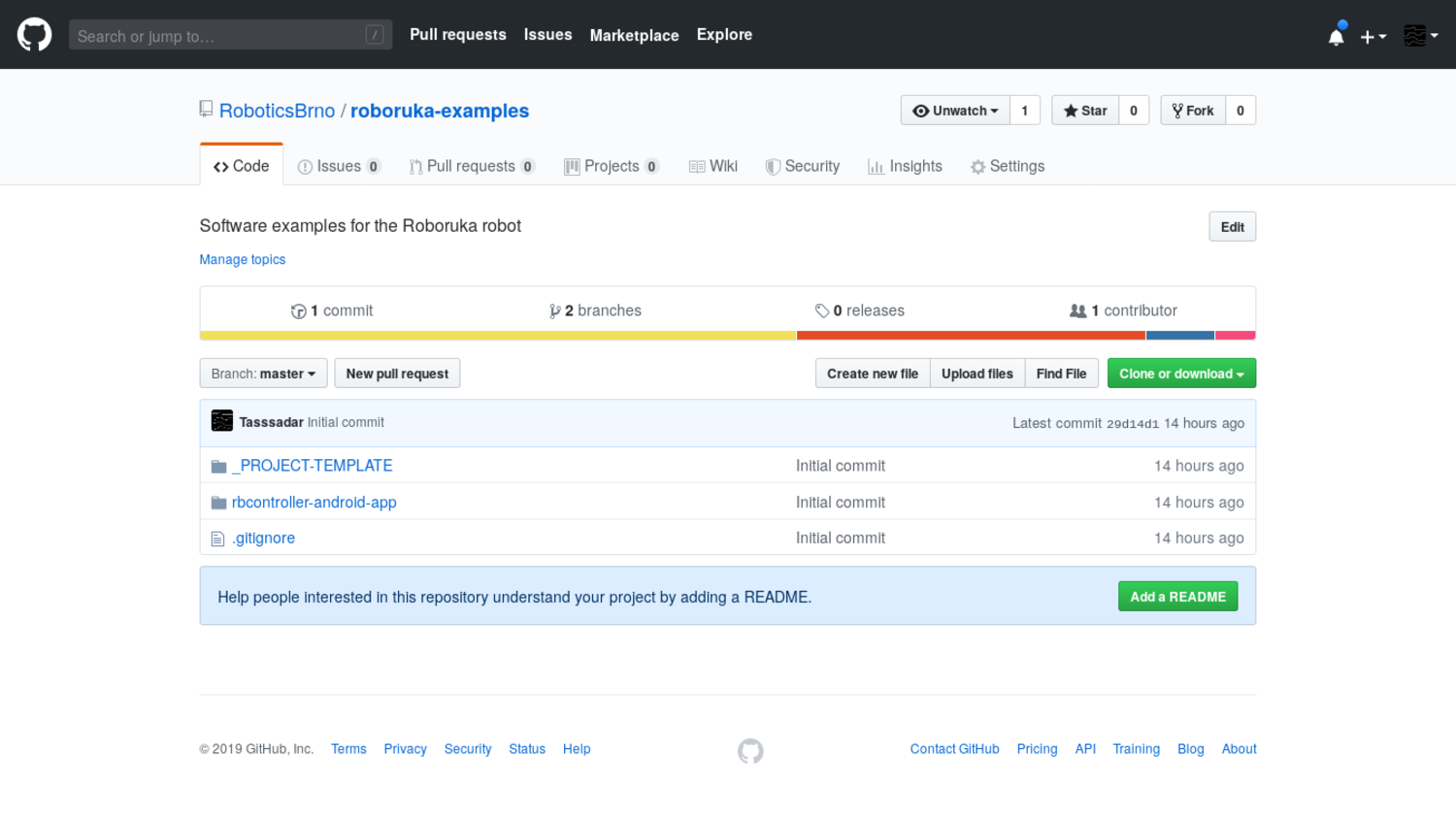
Stáhněte si ZIP se souborem příkladů pro Roboruku a někam ho rozbalte tak, aby jste ho zase našli.
Pokud vaše uživatelské jméno obsahuje diakritiku, tak nemůžete používat plochu ani složku dokumenty, ale musíte vytvořit například C:\Roboruka\examples.
Pokud víte, co je to Git a umíte ho používat, můžete místo toho naklonovat náš repozitář.
2
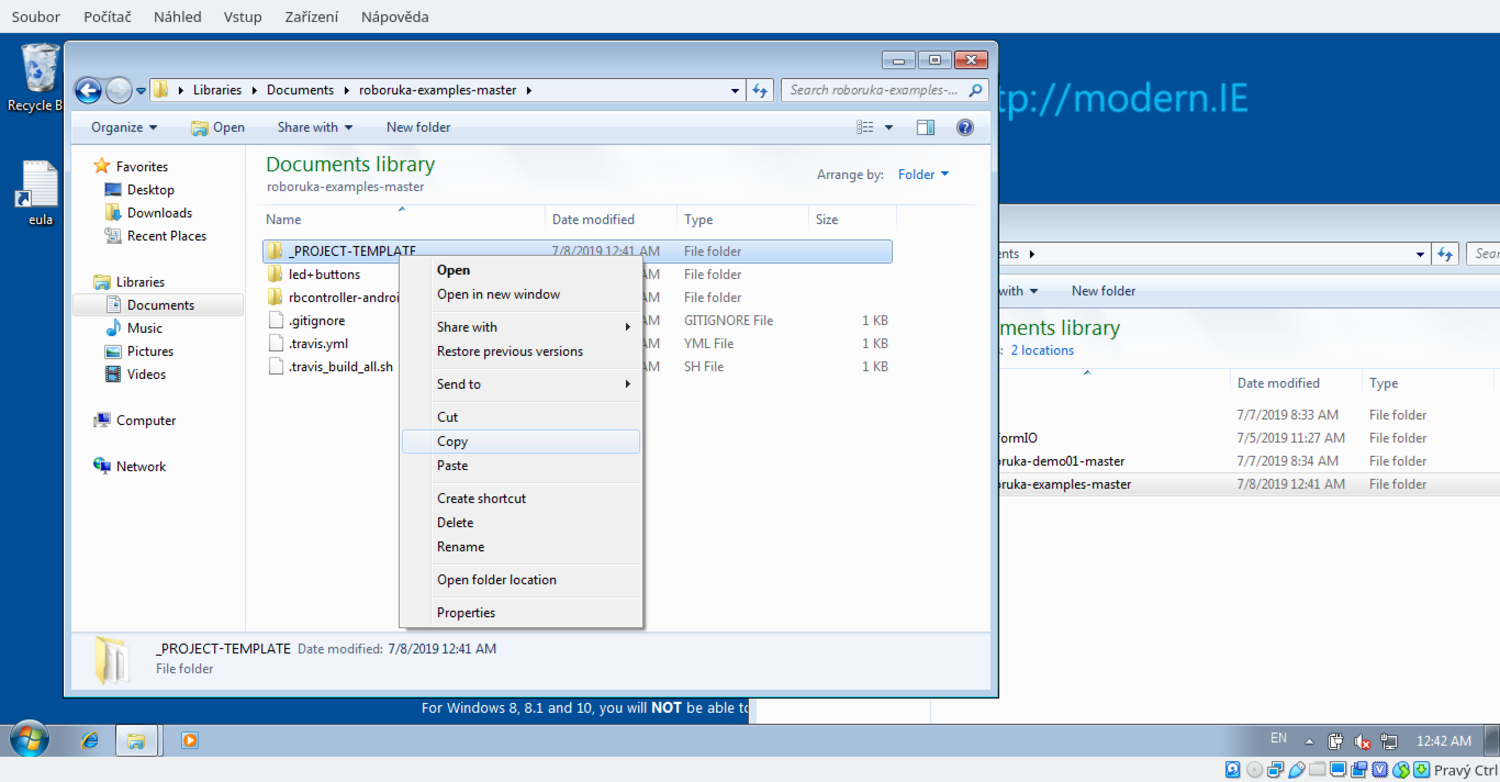
Najděte si v rozbaleném obsahu složku _PROJECT-TEMPLATE. Toto je šablona, na které budeme stavět všechny programy pro Roboruku. Celou ji zkopírujte někam jinam a pojmenujte třeba PrvniProgram. Pamatujte si, kam jste ji zkopírovali.

3
Ve File menu ve VSCode zvolte Open Folder… a otevřete složku PrvniProgram, kterou jste právě vykopírovali.

4
Po otevření projektu bude VSCode chvíli pracovat, počkejte, dokud text na dolním baru nezmizí.
5
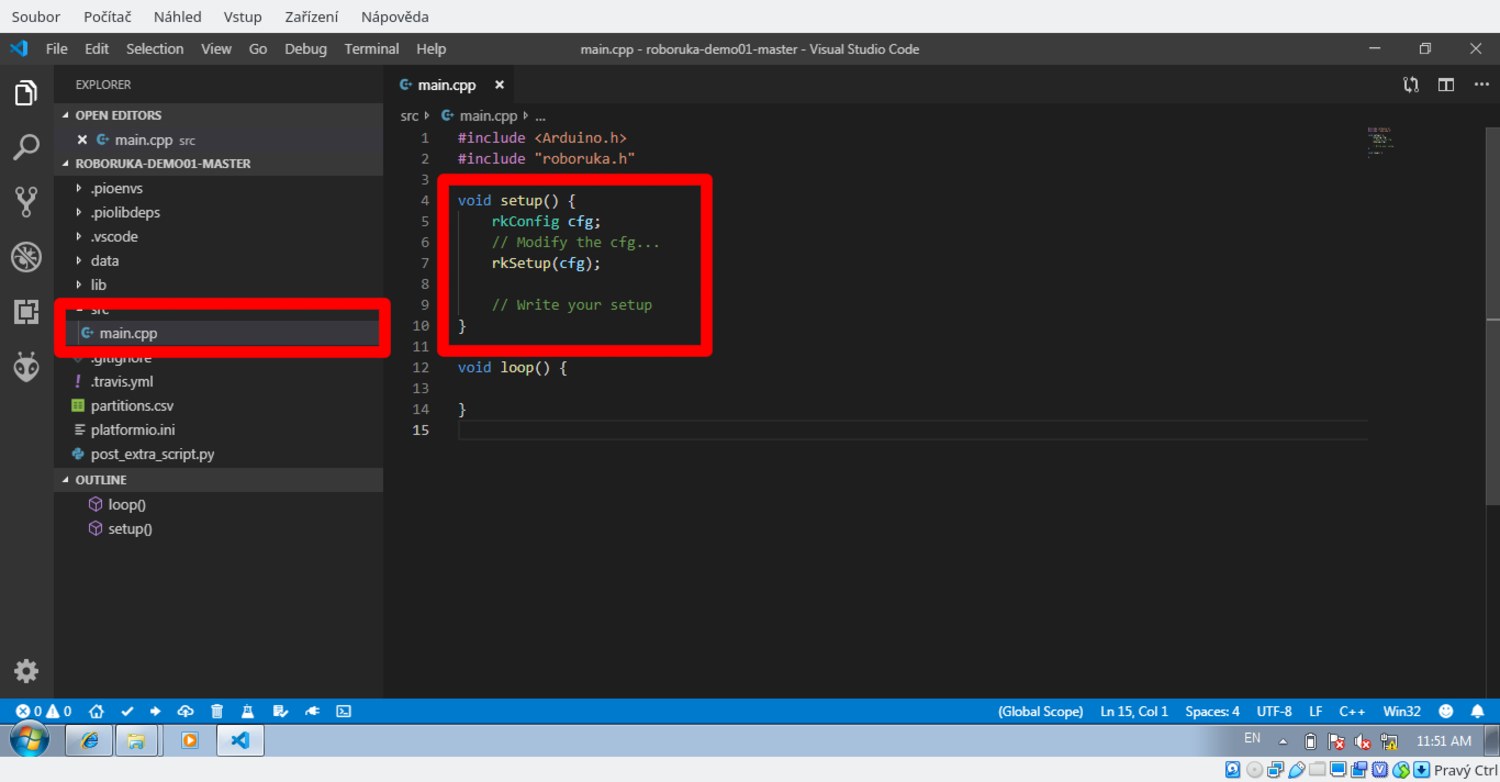
Otevřete soubor src/main.cpp a najděte funkci void setup(). Tato funkce je vykonána jednou, ihned po zapnutí robota. Musí v ní být volání rkSetup(); s případnou konfigurací, toto volání pro vás správně nastaví všechny části Roboruky.
Pokud znáte programování pro Arduino, tak metodu setup() znáte, u Roboruky funguje stejně jako s Arduinem.
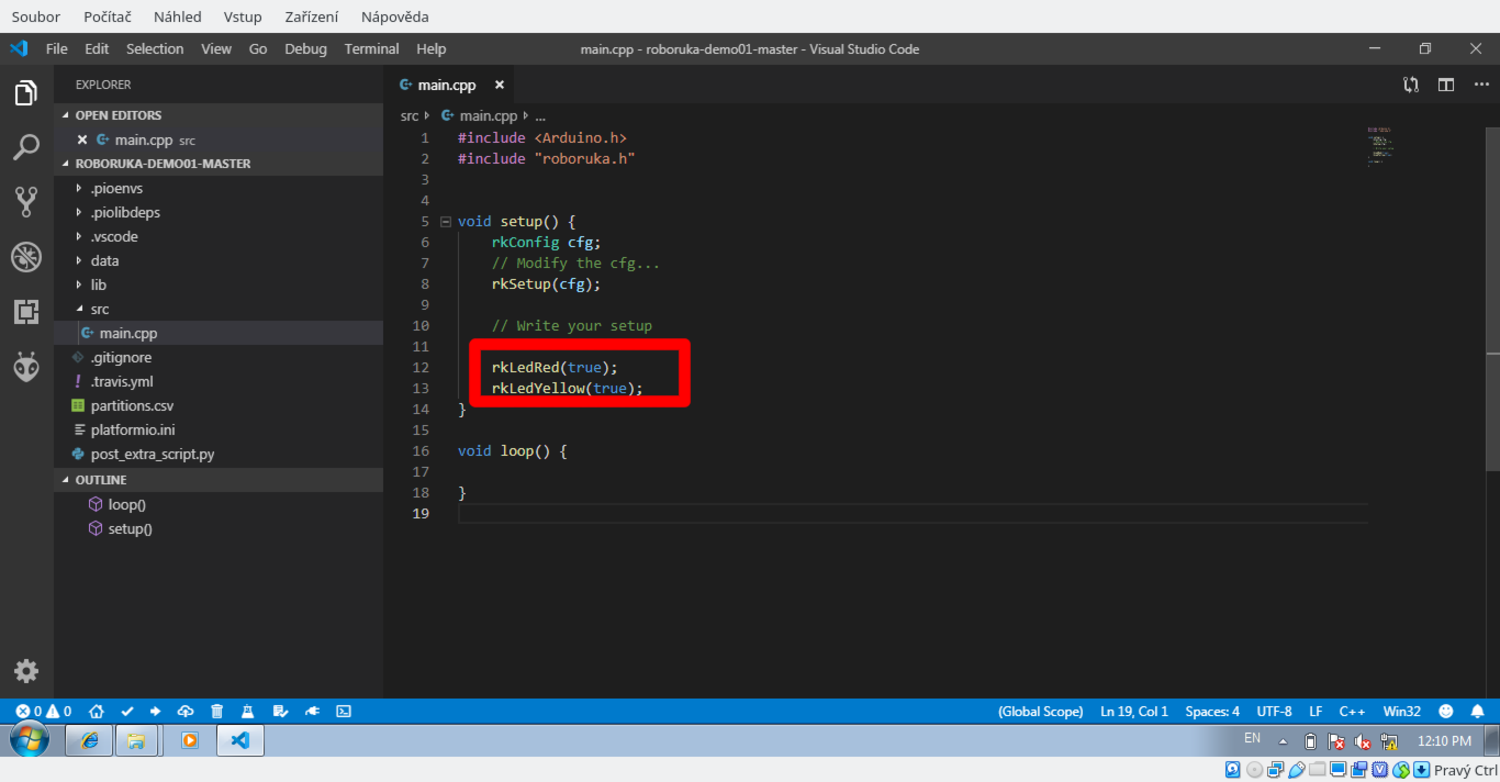
6
Dovnitř metody setup(), pod volání rkSetup(cfg); přidáme náš kód. Rozsvítíme červenou a žlutou LED:
rkLedRed(true);
rkLedYellow(true);
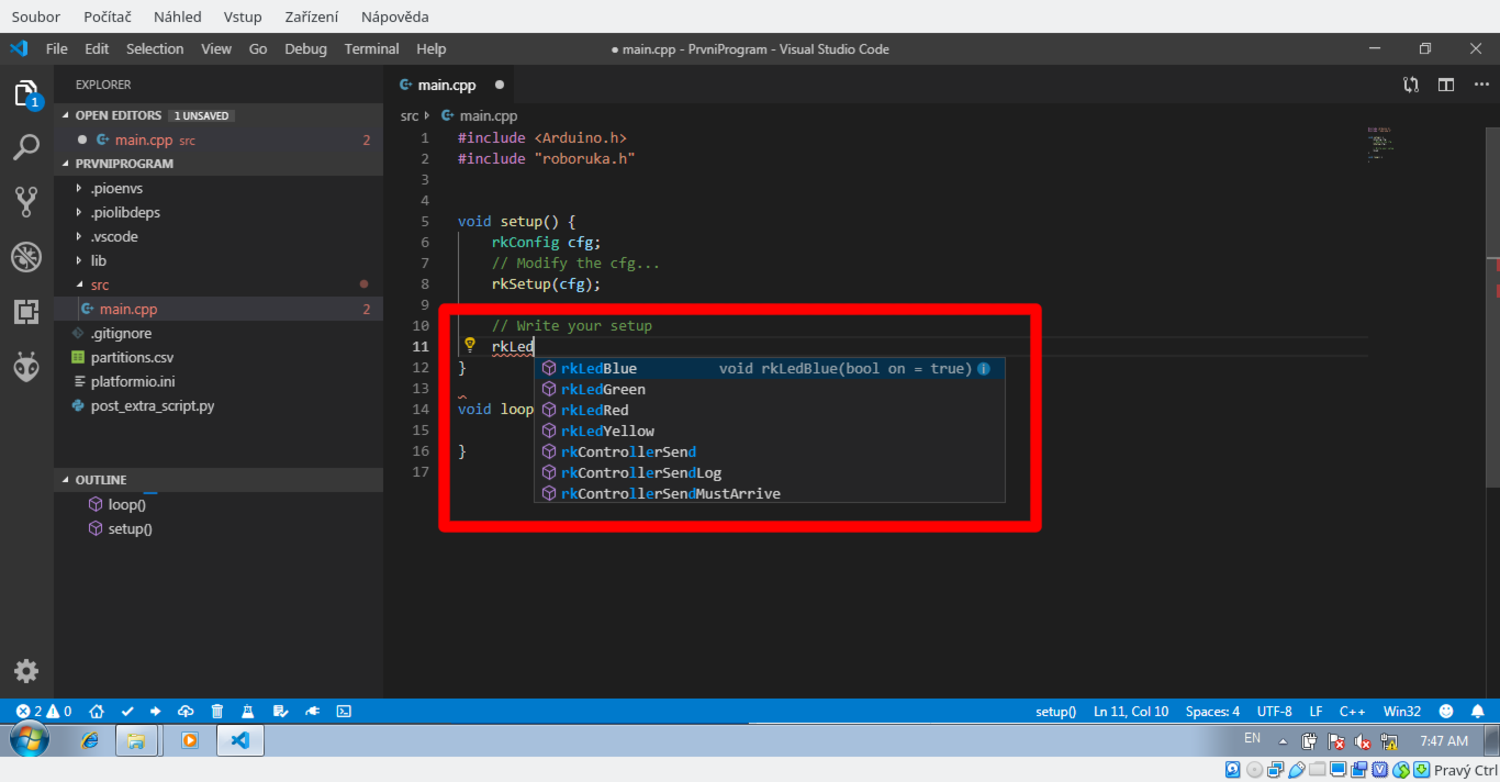
7
Všimněte si, že při psaní vám VSCode napovídá. Stačí napsat rk a už uvidíte všechny metody, které můžete používat na ovládání Roboruky.

8
Když na nějakou metodu najedete myší, VSCode vám také ukáže, co daná metoda dělá. Všechny tyto informace najdete také v dokumentaci.
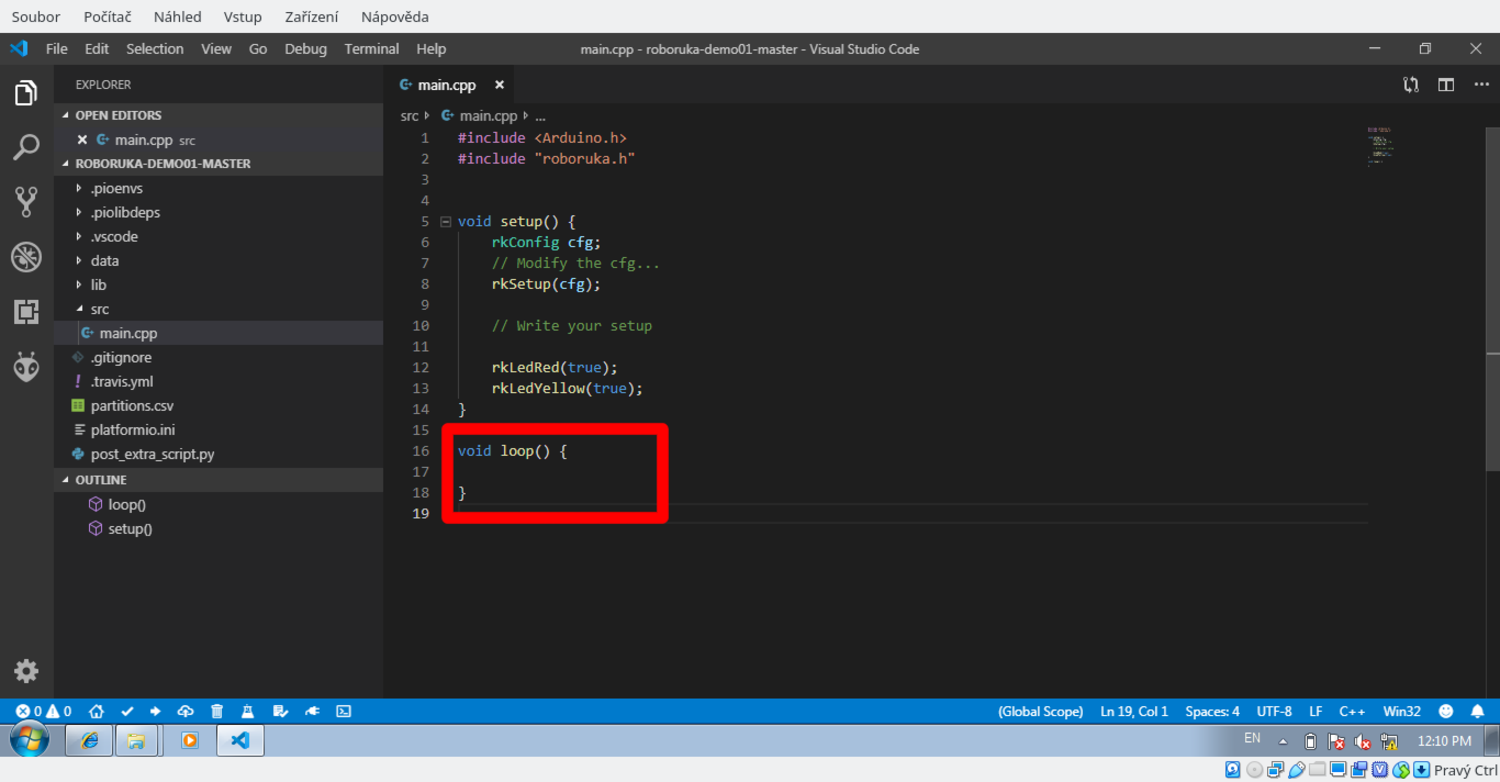
9
Najděte si funkci void loop(). Tato funkce je volána pořád dokola, dokud je Roboruka zapnutá.
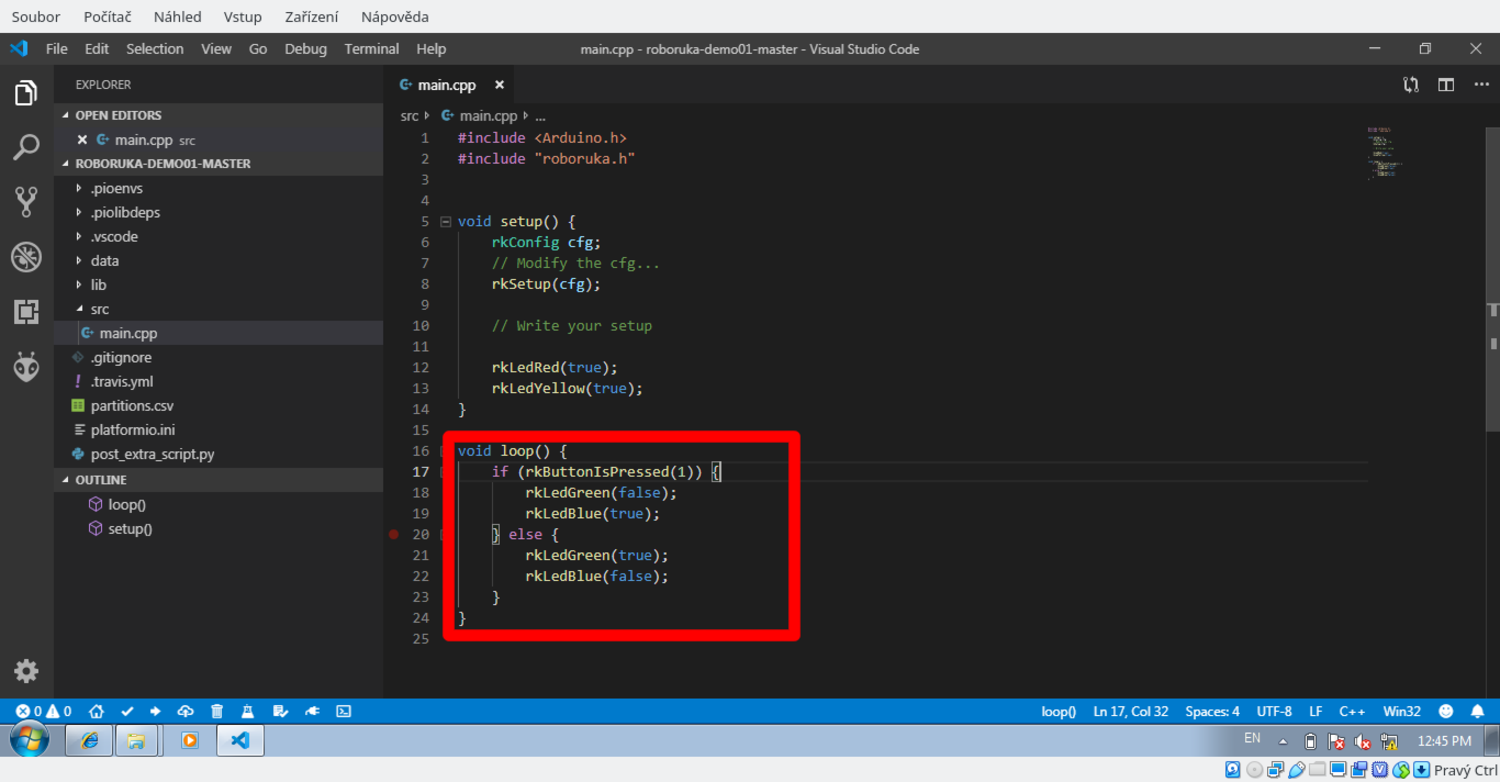
10
Uvnitř metody loop() dopíšeme kód, který zkontroluje, zda je tlačítko SW1 stisknuté, a pokud ano, tak zhasne zelenou LED a rozsvítí modrou LED. V opačném případě rozsvítí zelenou LED a vypne modrou:
if (rkButtonIsPressed(1, false)) {
rkLedGreen(false);
rkLedBlue(true);
} else {
rkLedGreen(true);
rkLedBlue(false);
}
11
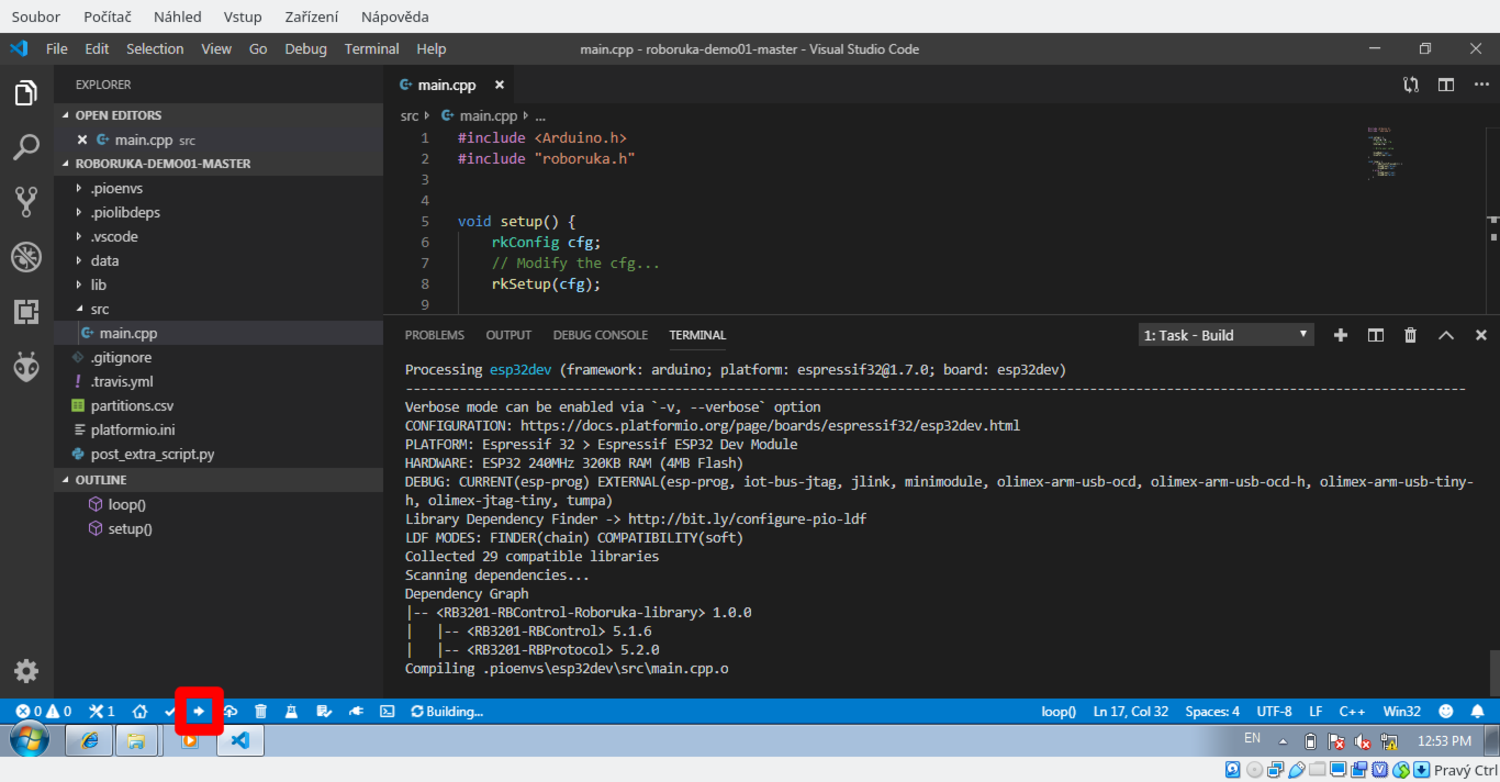
Kliknutím na šipku na dolním baru program zkompilujte a nahrajte do robota. Po nahrání začne svítit červená, žlutá a zelená LED. Po stisknutí tlačítka SW1 zelená zhasne a modrá se rozsvítí.
V kódu jsme používali metody z knihovny pro Roboruku: rkSetup(), rkLedRed()….
Metody, které můžete používat, naleznete v dokumentaci.
Dálkové ovládání
V této sekci ukážeme, jak zprovoznit na Roboruce program, který umožňuje ovládání Ruky z telefonu s Androidem přes aplikaci RBController nebo z Windows počítače přes naši aplikaci.
1
Pokud ještě příklady stažené nemáte, stáhněte si ZIP se souborem příkladů pro Roboruku a někam ho rozbalte tak, aby jste ho zase našli.
Pokud víte, co je to Git a umíte ho používat, můžete místo toho naklonovat náš repozitář.
2
Ve File menu ve VSCode zvolte Open Folder… a otevřete složku rbcontroller-android-app, která se nachází uvnitř složky, kterou jste právě rozbalili.
3
Po otevření projektu bude VSCode chvíli pracovat, počkejte, dokud text na dolním baru nezmizí.
4
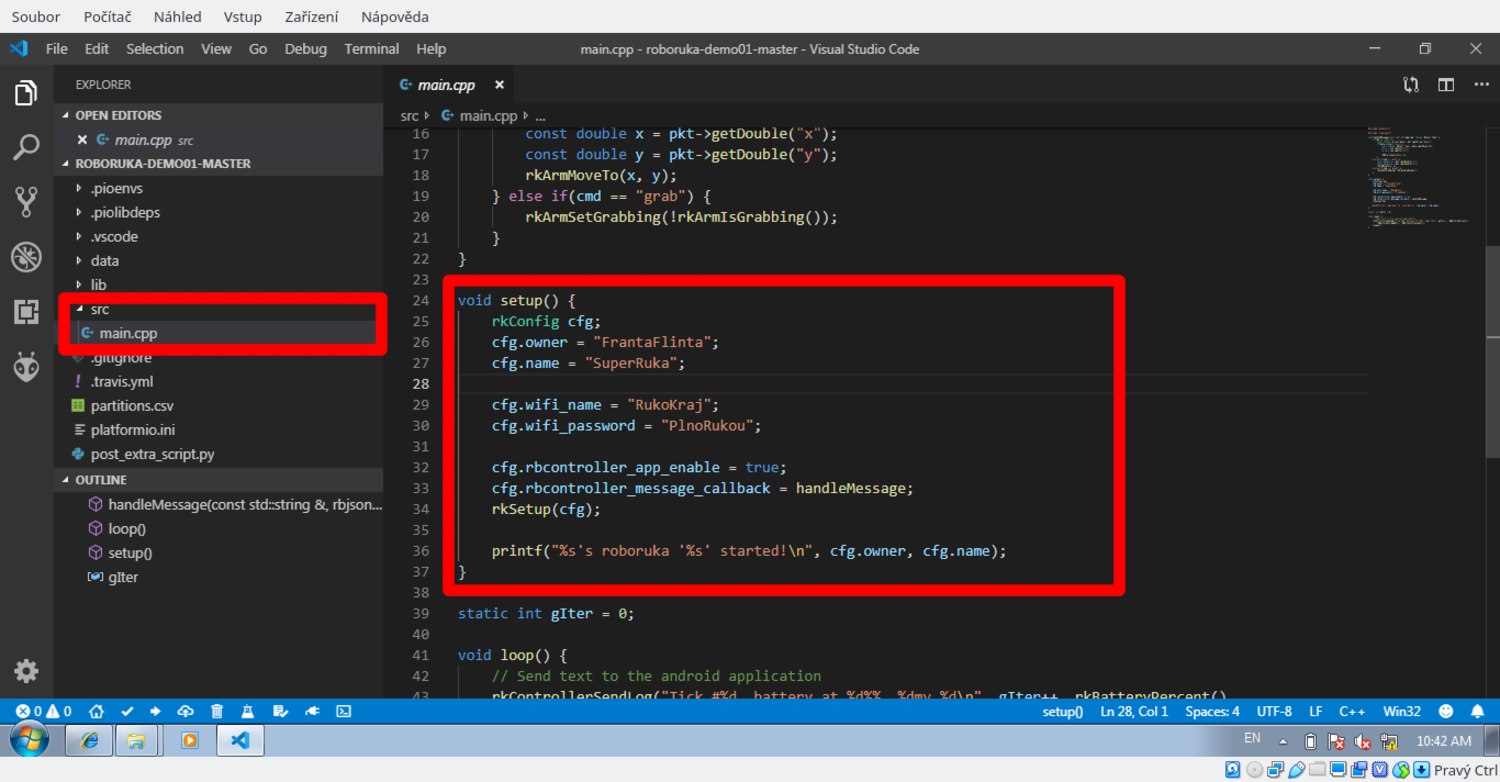
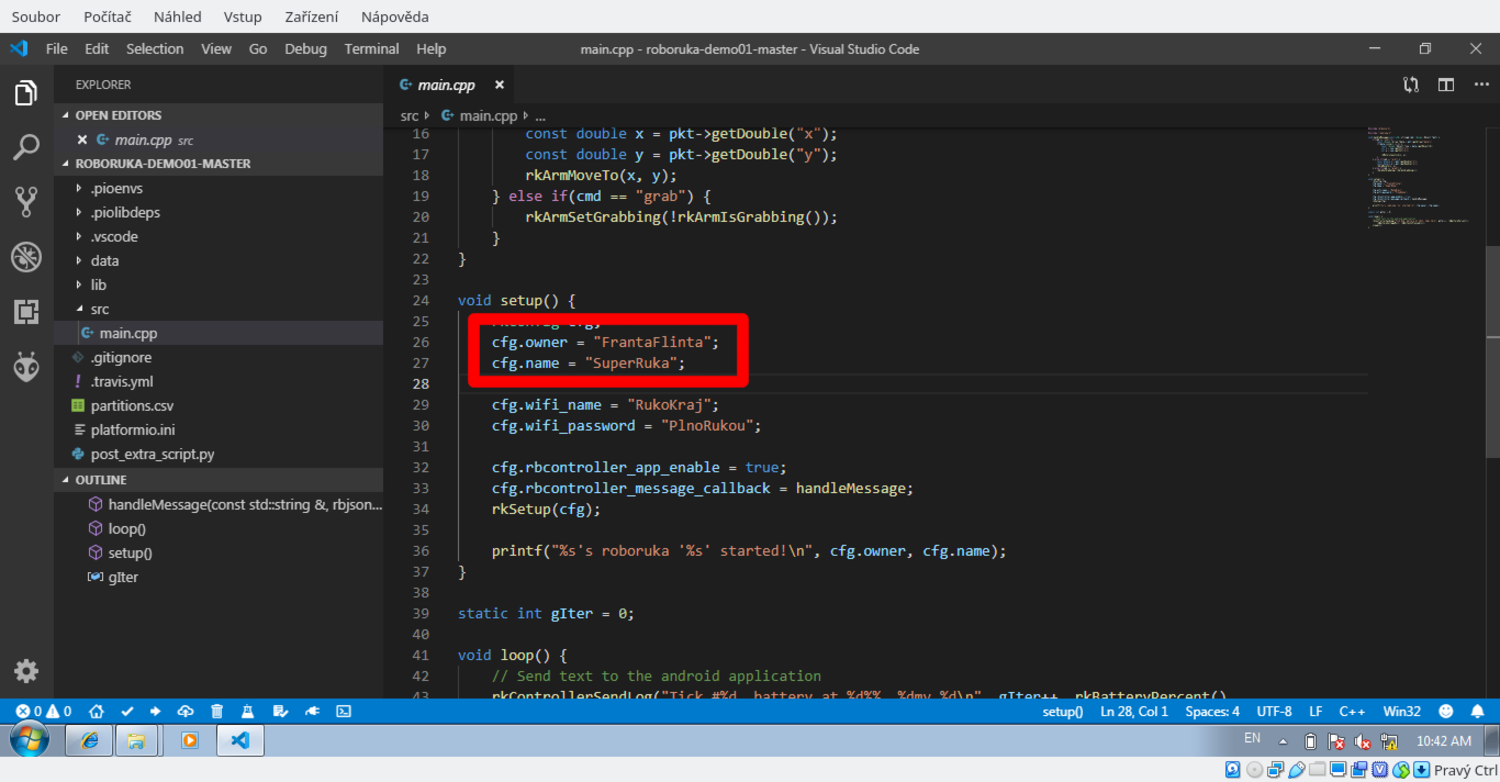
Otevřete soubor src/main.cpp a najděte funkci void setup().
5
Uvnitř funkce setup() upravte hodnoty přiřazované do proměnných cfg.owner a cfg.name. Owner je vaše jméno, podle něj aplikace pozná, která Ruka patří vám. Name je jméno robota, vyberte jaké chcete :)
Upravujete pouze hodnoty, tedy pokud se jmenuji Dařbuján, řádek cfg.owner = "FrantaFlinta"; se změní na cfg.owner = "Darjbujan";
6
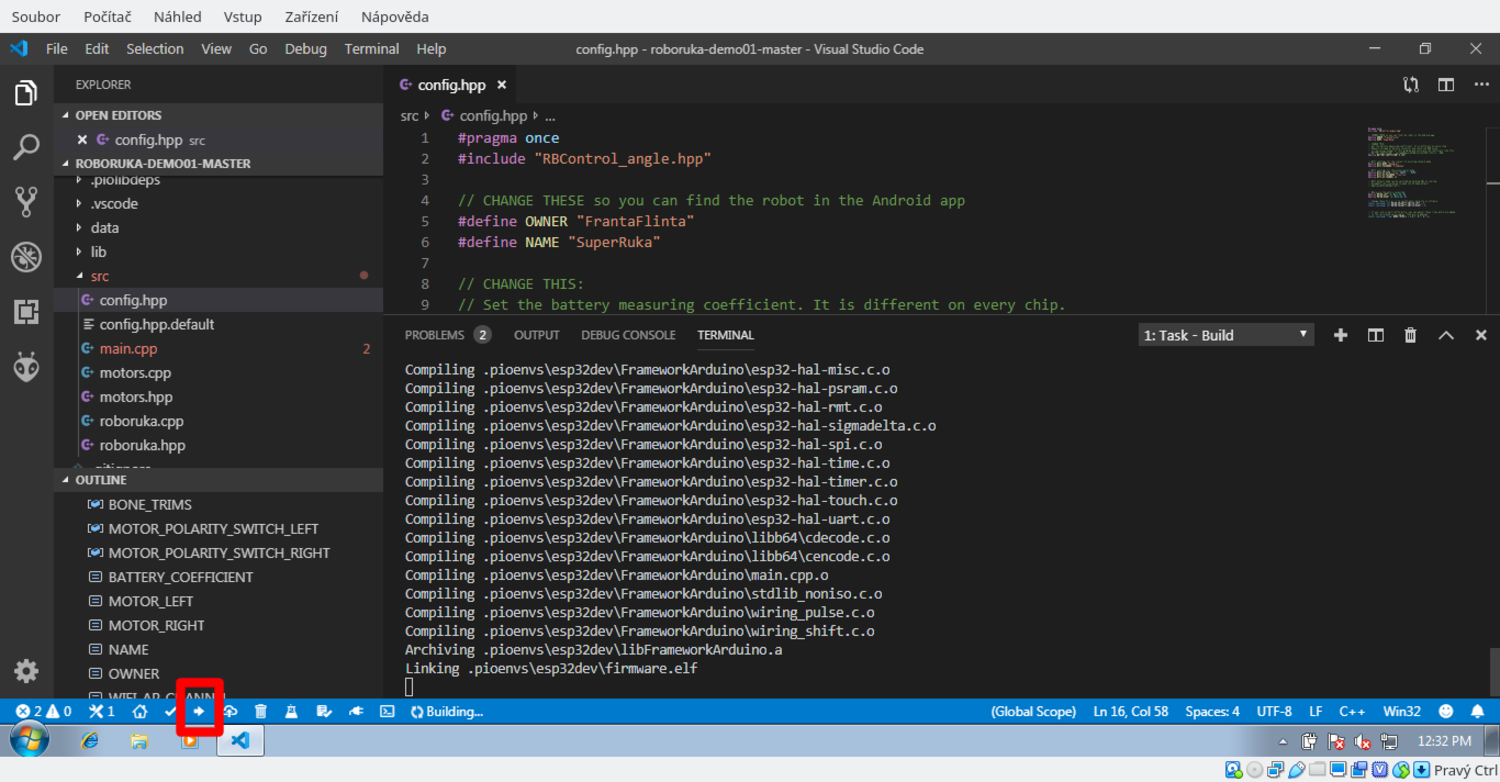
Kliknutím na šipku na dolním baru program zkompilujte a nahrajte do robota.
13
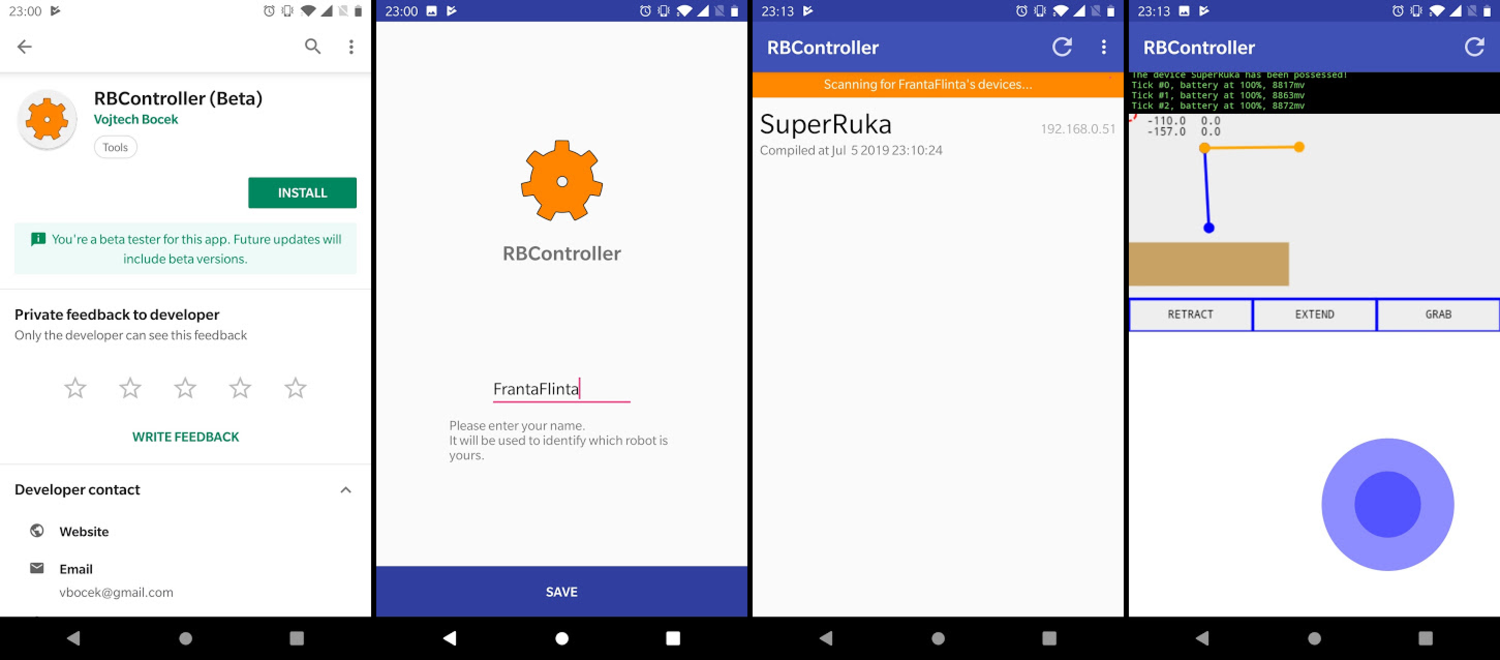
Na váš telefon s OS Android si stáhněte aplikaci RBController.
Zadejte stejné jméno, jako jste psali do proměnné cfg.owner. Aplikace by měla najít vaši Ruku a umožnit její ovládání.
Můžete také použít aplikaci pro Windows, kterou naleznete na táboře tady a mimo táborovou WiFi stahujte z Githubu.
Bonusový materiál
Pokud jsi dostal nějaký bonusový materiál ke svému robotovi a váháš, jak jej připojit, přečti si následujících pár kroků k zprovoznění.
Driver pro motory
Driver DRV8833 slouží k připojení dalších motorů k tvé desce RBControl. Pokud jsi skládal robota podle návodu, máš již jeden driver osazen.
Pro správné fungování je třeba zapájet pinheady obsažené v balení s driverem jednak na samotný driver a druhak i na desku RBControl. Driver je třeba osadit vedle již stávajícího driveru. Abychom mohli připojit motory k desce, je třeba připájet svorkovnice na desku do pozic M3 a M4.

1
Zde je potřeba připájet driver a svorkovnice.
Inteligentní LED
Inteligentní LED WS2812B lze použít například pro designové nasvícení robota, nebo pro signalizační LED pro rychlý přehled o stavu robota. Pro jejich fungování nelze použít napájení z již osazeného lineárního stabilizátoru na desce. Je proto nutné osadit spínaný zdroj do pozice IM3 a level shifter. LED diody se potom připojí na pinheady iLEDA.
Pro ovládání lze použít knihovnu SmartLeds

2
LED pásek z WS2812
3
Zde je potřeba připájet level shifter, spínaný zdroj a pinhead pro LED diody.
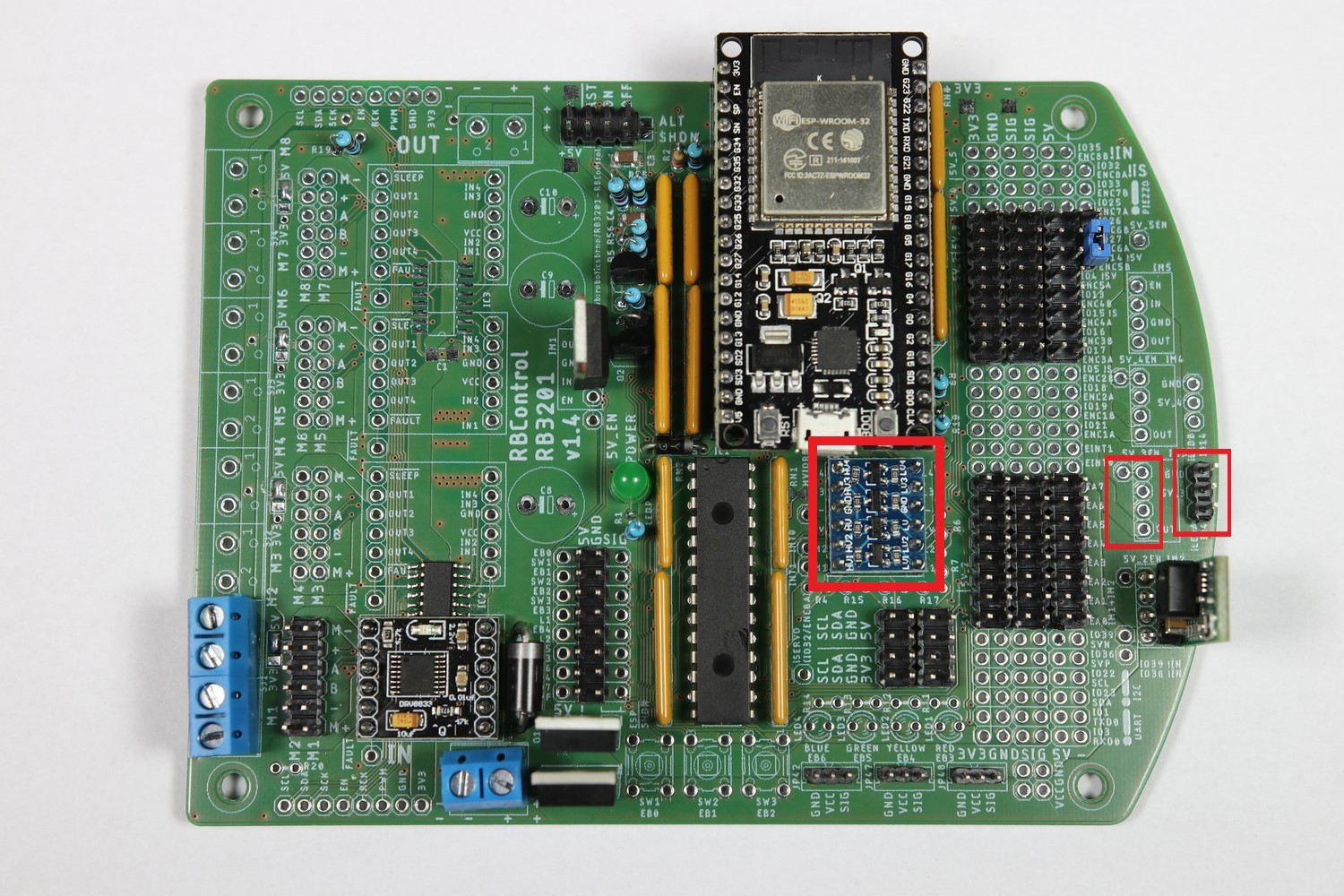
Gyroskop
3-osý gyroskop a akcelerometr MPU6050 slouží pro měření polohy vůči zemi a také gravitační zrychlení, čímž jsme schopni měřit náklon či vibrace. Připojuje se přes rozhraní I2C k desce RBControl, které je vyvedeno nad místem pro LED a tlačítka.
Pro programování nelze použít tradiční knihovnu Wire.h pro Arduino, ale je nutné použít I2C driver z ESP-IDF.

4
Modul MPU6050
5
Zde jsou na desce RBControl vyvedeny piny na sběrnici I2C
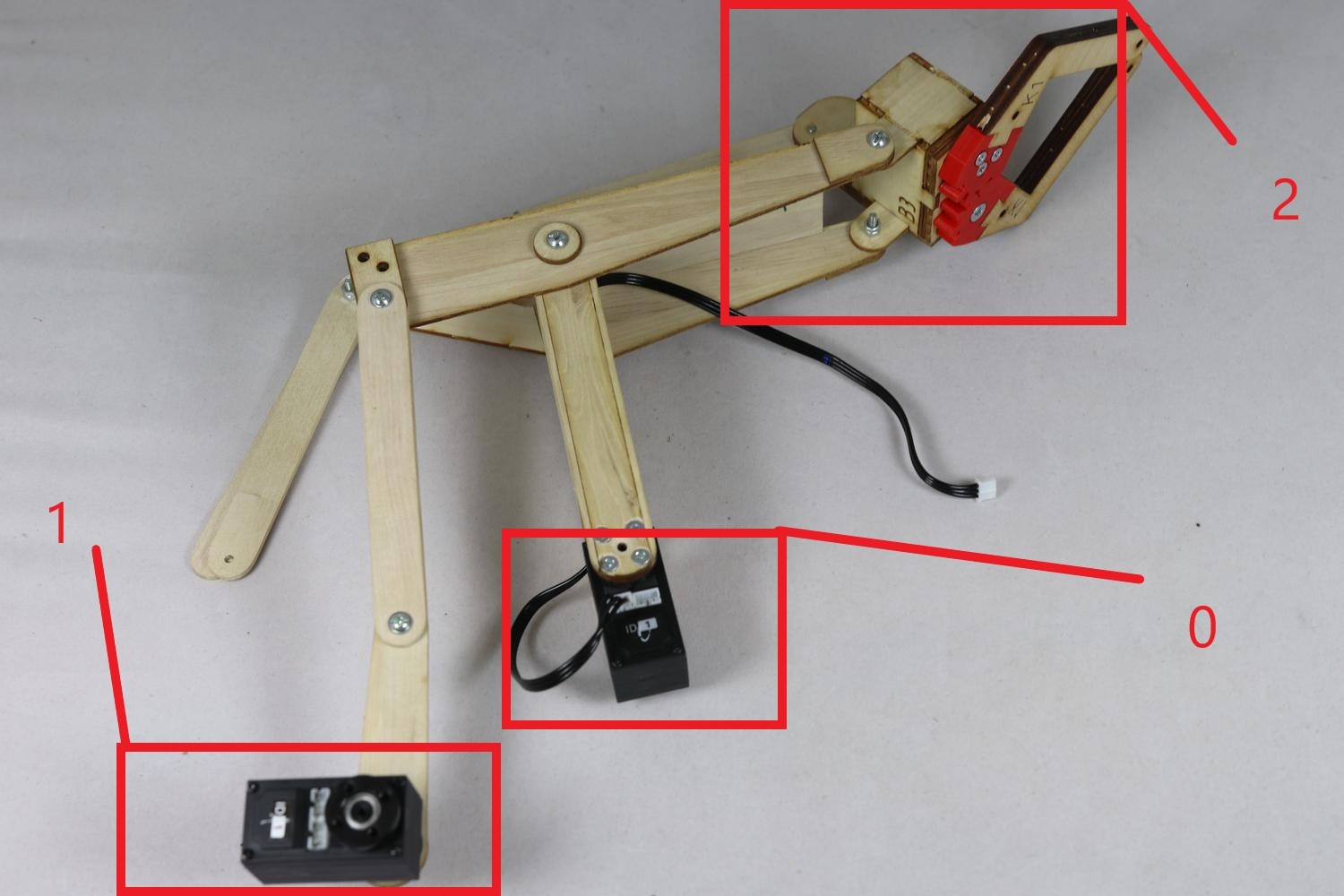
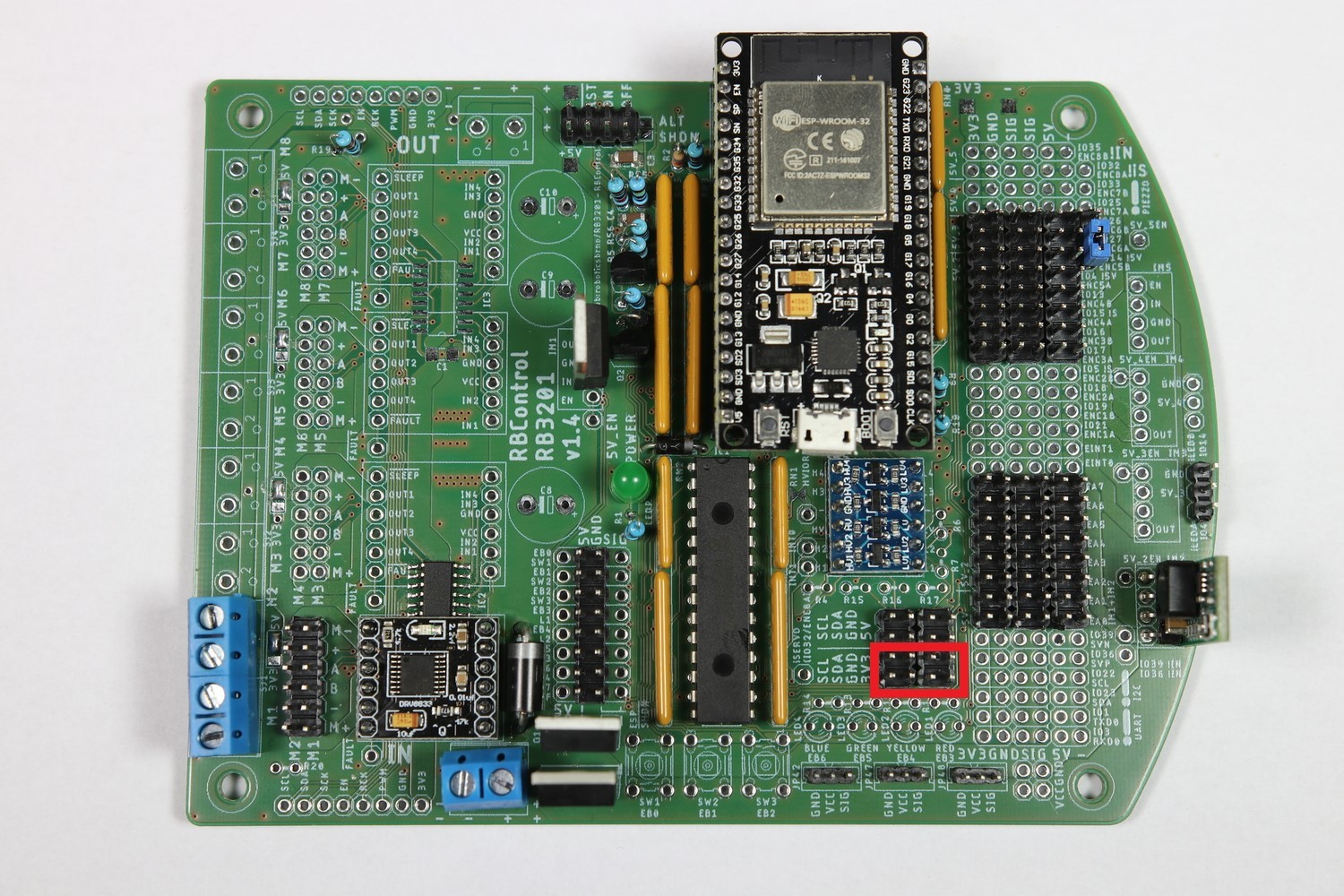
Inteligentní servo
Aby servo správně fungovalo a nebyly kolize v komunikaci mezi ostatními servy, je třeba mu nastavit jeho unikátní ID. To lze provést speciálním nastavovacím programem, který lze nalézt zde ve složce Servos_setup. Serva lze libovolně řetězit za sebe, jelikož každému nastavíte unikátní ID. Nelze je ovšem zapojovat do “řetězu” donekonečna, jelikož je potřeba relativně velký proud pro jeho provoz a kabely by nezvládaly takovýto proud přenášet. Doporučujeme proto maximálně tři serva zapojit za sebe. Pro tyto účely jsou na desce RBControl další pozice pro servo konektory.

6
Inteligentní servo s příslušenstvím
Senzorická lišta
Senzorická lišta je ideálním pomocníkem pro jízdu po čáře. Slouží k detekování např. černé a bílé barvy na povrchu pod robotem. Obsahuje celkem osm senzorů, ze kterých jsou hodnoty vyčítány pomocí AD převodníku MCP3008, které s RBControlem komunikuje přes sběrnici SPI. Je možné ji připojit ke kterémukoliv volnému pinu, ale doporučujeme IO4, IO14, IO26 nebo IO27, které jsou vyvedeny u ostatních pinheadů.
Pro ovládání lišty lze použít tuto knihovnu

7
Senzorická lišta
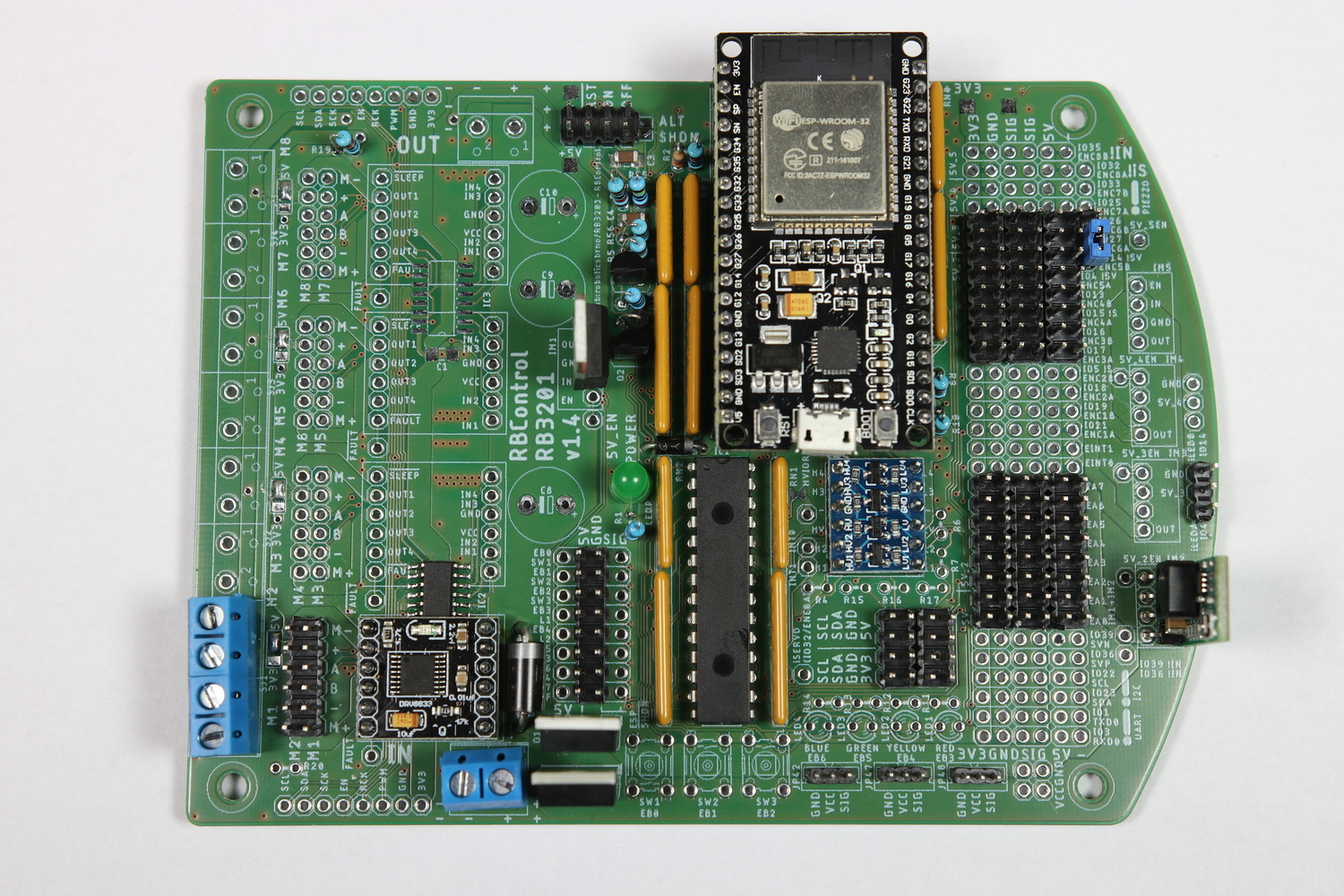
8
Zde lze připojit senzorickou lištu. Tohle zapojení je pouze doporučené, ne jediné funkční.